技术特征:
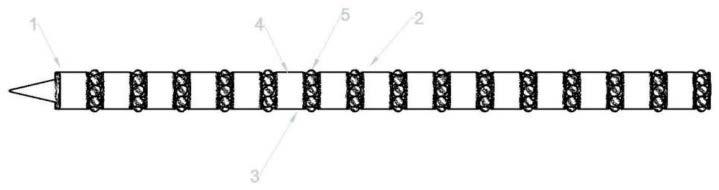
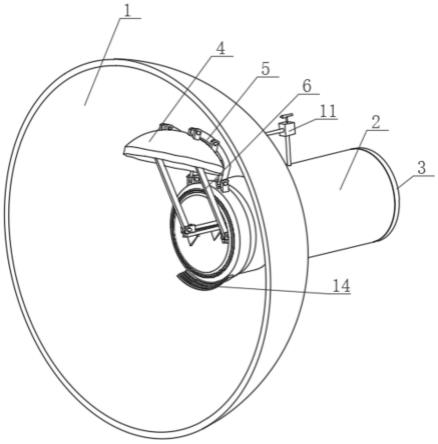
1.一种蛇形机器人,其特征在于它包括:头部,所述头部包括摄像头;身部,所述身部包括若干个头尾相连的驱动模块,所述驱动模块包括推进体、关节,所述推进体包括麦克纳姆轮、支架、电机(54)、齿轮(52),所述齿轮(52)有通孔,所述齿轮(52)固定在所述麦克纳姆轮的轮毂(511)内侧,所述麦克纳姆轮的轮毂(511)有圆孔,所述齿轮(52)的轴线以及所述麦克纳姆轮轮毂(511)圆孔的中心线和所述麦克纳姆轮的旋转轴线重合,所述支架包括圆管(55),所述麦克纳姆轮通过所述麦克纳姆轮轮毂(511)的圆孔转动固定在所述支架的圆管(54)上,所述电机(54)固定在所述支架上,所述电机(54)的转动轴上有齿轮(541),所述电机齿轮(541)和所述麦克纳姆轮的齿轮(52)相互啮合,所述电机(54)带动所述麦克纳姆轮旋转,所述推进体通过所述支架圆管(55)和所述关节固定连接,所述头部和所述身部相连接;线路板,所述线路板包括数据接口、电机驱动线路,所述头部摄像头通过数据线和所述线路板相连,所述电机(54)通过导线和所述线路板相连接;电源,所述电源通过导线和所述所述线路板相连。2.根据权利要求1所述的一种蛇形机器人,其特征在于:所述驱动模块的关节包括上底板、下底板、连接杆、球缺、三个电机(121、122、123)、三条缆线(311、312、313)、外壳,所述球缺的底面固定在所述连接杆的一端,所述上底板或下底板有凹槽,所述球缺滚动固定在所述上底板或者下底板的凹槽内,所述连接杆没有球缺的一端固定在所述下底板或者上底板上,所述三个电机(121、122、123)固定在所述下底板上,所述三条缆线(311、312、313)的一端分别固定在所述上底板上,所述三条缆线(311、312、313)的另一端分别和所述三个电机(121、122、123)的转动轴连接,所述三个电机(121、122、123)和所述线路板通过导线连接,所述外壳呈圆筒形,所述外壳的两个底面分别和所述下底板及上底板固定,所述外壳可变形,所述推进体支架的圆管(55)和所述关节的上底板或下底板固定,所述三个电机(121、122、123)通过导线和所述线路板相连。3.根据权利要求1所述的一种蛇形机器人,其特征在于:所述推进体包括齿轮轴(58)、减速齿轮(56),所述齿轮轴(58)固定在所述推进体支架上,所述减速齿轮(56)包括齿轮(561)、齿轮(562),所述减速齿轮(56)转动固定在所述齿轮轴(58)上,所述齿轮(561)和所述齿轮(562)固定连接,所述齿轮(561)和所述齿轮(562)的轴线重合,所述齿轮(561)和所述麦克纳姆轮齿轮(52)啮合,所述齿轮(562)和所述电机齿轮(541)啮合。4.根据权利要求1所述的一种蛇形机器人,其特征在于:所述麦克纳姆轮包括第二轮毂(512),所述支架包括第二圆管(57),所述轮毂(512)有圆孔,所述轮毂(512)圆孔的中心线和所述麦克纳姆轮的旋转轴线重合,所述麦克纳姆轮转动固定在所述支架圆管(57)上。5.根据权利要求1所述的一种蛇形机器人,其特征在于:所述相邻推进模块的麦克纳姆轮行星轮转动轴方向不同,如果一个所述推进体的麦克纳姆轮是左轮,它相邻所述推进体的麦克纳姆轮是右轮。6.根据权利要求1所述的一种蛇形机器人,其特征在于:所述推进体包括轴承,所述轴承的外圈固定在所述麦克纳姆轮轮毂(611)圆孔内,所述支架圆管(711)穿过所述轴承内圈并和所述轴承的内圈固定。7.根据权利要求1和权利要求2所述的一种蛇形机器人,其特征在于:所述关节包括三
个齿轮轴(421、422、423)、三个齿轮(231、232、233),所述三个齿轮轴(421、422、423)固定在所述关节下底板上,所述三个齿轮(231、232、233)转动固定在所述三个齿轮轴(421、422、423)上,所述三个电机(121、122、123)的转动轴有齿轮(241、242、243),所述三个齿轮(231、232、233)分别和所述三个电机齿轮(241、242、243)相啮合,所述三条缆线(311、312、313)的一端分别和所述三个齿轮(231、232、233)的转动轴相连接。8.根据权利要求1所述的一种蛇形机器人,其特征在于:所述头部包括电机(171)、钻头,所述电机(171)带动所述钻头旋转,所述电机(171)通过导线和所述线路板相连。9.根据权利要求1和权利要求8所述的一种蛇形机器人,其特征在于:所述头部包括灯,所述灯和所述线路板通过导线相连接。10.根据权利要求1所述的一种蛇形机器人,其特征在于:所述头部还包括话筒,所述话筒和所述线路板相连。
技术总结
本发明公开了一种蛇形机器人,包括头部、身部、线路板、电源。头部包括摄像头、钻头,身部包括多个首尾相连的驱动模块,每个驱动模块包括一个关节和一个推进体。推进体包括麦克纳姆轮、支架、电机,电机固定在支架上,麦克纳姆轮转动固定在支架上,电机带动麦克纳姆轮旋转,若干个麦克纳姆轮驱动蛇形机器人运动,通过控制电机,可以控制蛇形机器人的运动速度。关节包括至少3个电机,通过控制各个关节内的电机来控制蛇形机器人的形态以及运动的方向。本发明公开的蛇形机器人具有行进速度快、动作敏捷、可以在多种复杂环境下工作等优点。可以在多种复杂环境下工作等优点。可以在多种复杂环境下工作等优点。
技术研发人员:赵罡
受保护的技术使用者:赵勇
技术研发日:2022.10.08
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。