1.本发明涉及一种用于无人驾驶飞行器的发动机装置。更确切地说,涉及一种用于无人驾驶飞行器的发动机装置,其具有与无人驾驶飞行器的水平对置发动机中的两个曲轴相对应的两个离心离合器。
背景技术:
2.往复式发动机已被更多地用于无人驾驶飞行器(无人机)。直列式发动机和水平对置式发动机是往复式发动机的代表。水平对置发动机的活塞和气缸体分别设置在曲轴的左右两侧。与直列式发动机相比,水平对置式发动机具有发动机振动小和发动机在前后方向上的长度短等优点。
3.专利文献1公开了一种发动机,其中,第一活塞和第二活塞在垂直方向上竖立设置;以及第一曲轴和第二曲轴,分别对应于第一活塞和第二活塞,水平设置在第一活塞和第二活塞下方。第一曲轴和第二曲轴在彼此相反的方向上旋转,以消除飞行器的陀螺效应。
4.对于具有多个螺旋桨的无人驾驶飞行器中的往复式发动机,需要注意以下几点:
5.(1)改善飞行器的重量平衡。具体来说,发动机的输出轴位于飞行器的中心,发动机的重心与飞行器的重心重合;
6.(2)发动机内部的旋转部件的陀螺效应不会对飞行器的可控性产生不利影响;
7.(3)即使发动机因故障而停止,飞行器也能安全降落,也就是说,即使发动机停止,螺旋桨也能通过接收气流自动旋转。
8.现有技术文献
9.专利文献
10.专利文献1
11.日本未审查的专利申请公开号:2019-148186
技术实现要素:
12.要解决的技术问题
13.本发明的目的是提供一种用于无人驾驶飞行器的发动机装置,该装置
14.(1)带给飞行器良好的重量平衡;
15.(2)可以消除对飞行装置的可控性产生不利影响的陀螺效应;以及
16.(3)具有即使发动机停止也能自动旋转的螺旋桨。
17.解决技术问题的方法
18.根据本发明,用于无人驾驶飞行器的发动机装置包括:第一气缸和第二气缸,其在左右方向的轴线上水平设置且相互对置,气缸内的活塞在彼此相反的方向上前进和后退;第一曲轴和第二曲轴,其设置在垂直于轴线的垂直方向上,分别由第一气缸和第二气缸驱动,并在彼此相反的方向上旋转;第一离心离合器和第二离心离合器,其设置在第一曲轴和第二曲轴上方,并且在彼此相反的方向上旋转;最终驱动轴,其将旋转力传递给齿轮机构,
使螺旋桨轴旋转;以及,单向离合器,其设置在
19.(1)第一曲轴和第二曲轴;与
20.(2)最终驱动轴之间,并由第一曲轴和第二曲轴两者驱动。
21.该发动机装置,其中来自第一气缸的排气管和来自第二气缸的排气管在等长点处连接,然后转成u形并连接到设置在排气管下方的消声器。
22.所述发动机装置,其中在第一气缸和第二气缸中分别设有第一凸轮轴和第二凸轮轴,以控制各自的气阀,其中一个凸轮轴由第一曲轴驱动,而另一个凸轮轴由第二曲轴通过换向齿轮驱动;并且第一凸轮轴和第二凸轮轴在同一方向上旋转。
23.本发明的效果
24.根据本发明的用于无人驾驶飞行器的发动机装置:
25.(1)提供第一离心离合器和第二离心离合器,由于第一离心离合器和第二离心离合器以大的动量在彼此相反的方向上旋转,因此可以消除陀螺效应,飞行器的姿态控制变得容易;
26.(2)提供两个离心离合器可以使发动机装置的高度低于提供一个具有大的半径和高度的离心离合器。而且,第一离心离合器和第二离心离合器可以安排在发动机中心附近的对称位置,重心可以保持在中心;
27.(3)由于提供了单向离合器,因此可进行自动旋转,这可以大大降低碰撞的风险。例如,单向离合器的轴的螺旋桨侧可以保持旋转;
28.(4)因为
29.(a)第一气缸和第二气缸在左右方向的轴线上水平设置且相互对置;以及
30.(b)气缸内的活塞在彼此相反的方向上前进和后退,活塞的振动被消除,这使得发动机装置振动低。
31.(5)由于第一曲轴和第二曲轴在垂直方向上竖立设置,可以减少发动机在前后方向的长度。
32.根据权利要求2:
33.(1)由于消声器被布置在发动机的底部,因此发动机的重心可以保持在其中心附近;
34.(2)由于只有一个消声器,发动机装置可以是轻量化和紧凑的。
35.(3)由于排气管在等长点处连接并合二为一,可以节省排气管的体积。
36.根据权利要求3:
37.由于第一凸轮轴和第二凸轮轴在相同方向上旋转,因此第一气缸、第二气缸、活塞和气门的控制单元可以共用。虽然凸轮轴在相同方向上旋转,但由此产生的陀螺效应非常小,可以忽略不计。共用部件的有利效果要大于非常小的陀螺效应。
附图说明
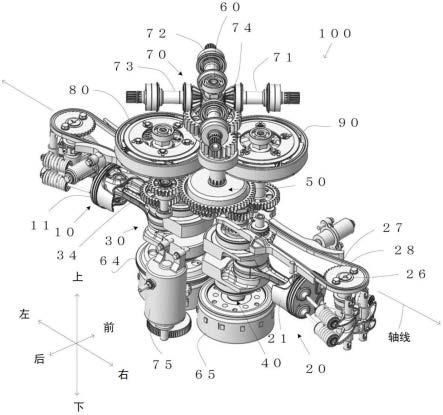
38.图1是根据本发明的用于无人驾驶飞行器的发动机装置的透视图。
39.图2是根据本发明的用于无人驾驶飞行器的发动机装置的透视图。
40.图3显示了用于无人驾驶飞行器的发动机装置的主要部件的旋转方向。
41.图4是包括附件在内的用于无人驾驶飞行器的发动机装置的外视图。
42.图5是图4的发动机装置的左视图。
具体实施方式
43.以下对本发明的用于无人驾驶飞行器的发动机装置进行详细说明。
44.实施例
45.图1是根据本发明的用于无人驾驶飞行器的发动机装置的透视图。该透视图是从右后上方斜向下看。该视图以外壳被移除的方式示出,以便可以看到内部。发动机装置100是一个双缸发动机,第一气缸和第二气缸在左右方向的轴线上水平设置并相互对置。在第一气缸中装有第一活塞11,在第二气缸中装有第二活塞21。作为一个例子,设置有第二凸轮轴,且其通过由第二皮带28驱动的第二齿轮27旋转,以控制排气阀和进气阀。
46.如图1所示,第一曲轴30和第二曲轴40在垂直于轴线的垂直方向上竖直设置。第一曲轴30由第一气缸10的第一活塞11驱动并旋转。第二曲轴40由第二气缸20的第二活塞21驱动并旋转。第一曲轴30和第二曲轴40在彼此相反的方向上旋转,能消除陀螺效应。在第一曲轴30下方设有第一发电机64,而在第二曲轴40下方设有第二发电机65。第一发电机64和第二发电机65通过第一曲轴30和第二曲轴40的旋转发电,并向发动机的点火系统、燃料供给系统和无人驾驶飞行器的控制单元等供电。在发动机的后下部设有启动器75。
47.第一离心离合器80和第二离心离合器90分别布置在第一曲轴30和第二曲轴40上方。第一曲轴30的旋转力被传递到第一离心离合器80。第二曲轴40的旋转力被传递到第二离心离合器90。当第一曲轴30的旋转速度增加时,离心力作用于内部重量上,第一离心离合器80的离合器片被接合,第一离心离合器80旋转其在图2中向下突出的输出齿轮。类似地,当第二曲轴40的旋转速度增加时,第二离心离合器90旋转其在图2中向下突出的输出齿轮。
48.在第一离心离合器80和第二离心离合器90下方布置有一个单向离合器50。单向离合器50的外齿轮由第一离心离合器80和第二离心离合器90两者驱动。第一离心离合器80和第二离心离合器90在彼此相反的方向上旋转。在本实施例中,第一离心离合器80的输出齿轮的旋转方向由换向齿轮34换向,输出齿轮通过换向齿轮驱动单向离合器50。第二离心离合器90的输出齿轮直接驱动单向离合器50。单向离合器50的输出轴通过传递第一离心离合器80的旋转力而在一个方向上旋转,第二离心离合器90通过内部的挂钩传递给单向离合器50的输出轴,输出轴在一个方向上旋转。即使没有挂钩的驱动,输出轴也能在一个方向上旋转,起到所谓单向离合器的作用。
49.单向离合器50的输出轴通过齿轮将其旋转力传递给最终驱动轴60。在最终驱动轴60中设有包括正交变换齿轮的齿轮机构70,并在四个方向上将旋转力传递给螺旋桨轴71至74。
50.图2是根据本发明的用于无人驾驶飞行器的发动机装置100的透视图。该透视图是从右下后方斜向上看。将进行解释以作为图1的补充。第一气缸10和第二气缸20水平设置并相互对置。第一曲轴30和第二曲轴40设置在垂直于连接第一气缸10和第二气缸20的线的竖直方向上。
51.如图2所示,第一凸轮轴16由第一皮带18驱动的第一齿轮17转动,第一凸轮轴16控制第一气缸10的排气阀和进气阀。第一活塞11在第一气缸内,与它的连杆相连,并使第一曲轴30旋转。第二活塞21在第二气缸内,与它的连杆相连,并使第二曲轴40旋转。第二气缸20
的第二皮带28由设置在换向齿轮29的轴内的齿轮驱动,以使第二曲轴40的旋转方向换向。也就是说,第二凸轮轴26的旋转方向与第二曲轴40的旋转方向相反。
52.第一离心离合器80下方的部分配置如下。从动齿轮31由第一曲轴30的齿轮驱动,并使第一离心离合器轴32旋转。当第一离心离合器轴32的旋转速度增加时,离心力作用于第一离心离合器80内部的重量上,第一离心离合器80内部设置的离合器片被接合。由此,第一离心离合器80下方的第一离心离合输出齿轮33旋转。第一离心离合器输出齿轮33的旋转方向由换向齿轮34换向。换向齿轮34与单向离合器50的单向离合器齿轮51啮合,并使单向离合器50旋转。因此,单向离合器轴52旋转,旋转力通过设置在单向离合器轴52中的驱动齿轮53经从动齿轮63传递到最终驱动轴60。第二离心离合器90具有类似的结构,第二离心离合器90的输出以第二离心离合器输出齿轮43显示。但没有换向齿轮,第二离心离合器输出齿轮43与单向离合器齿轮51啮合,旋转力被传递。
53.图3显示了无人驾驶飞行器的发动机装置的主要部件的旋转方向。该透视图是从右上前方斜向下看。旋转方向被定义为第一曲轴30顺时针旋转,而第二曲轴40逆时针旋转。从齿轮的设置来看,第一离心离合器80逆时针旋转,第二离心离合器90顺时针旋转。在任何一种情况下,旋转的方向都是彼此相反的,能以此来抵消陀螺效应。虽然第一凸轮轴16和第二凸轮轴26在相同的顺时针方向上旋转,但由此产生的陀螺效应非常小,可以忽略不计。共用部件的有利影响大于非常小的陀螺效应。
54.参照图3,第一离心离合器80下的配置解释如下。第一离心离合器80的从动齿轮31由第一曲轴30的驱动齿轮37驱动,并使第一离心离合器轴32旋转。当第一离心离合器轴32旋转时,离心力作用于第一离心离合器80的内部重量上,内部的离合器片被接合。借此,第一离心离合器80下方的第一离心离合器输出齿轮33旋转(参见图2)。同样,第二离心离合器90的从动齿轮41由第二曲轴40的驱动齿轮47驱动,并使第二离心离合器轴42旋转。当第二离心离合器轴42旋转时,离心力作用于第二离心离合器90的内部重量,内部的离合器片被接合。借此,第二离心离合器90下的第二离心离合器输出齿轮43旋转(参见图2)。
55.如图3所示,两个齿数相同的齿轮36设置在第一曲轴30和第二曲轴40之间,并相互啮合旋转。因为一个齿轮36由第一曲轴30驱动,另一个齿轮36由第二曲轴40驱动,所以第一曲轴30和第二曲轴40的旋转速度是相同的。
56.图4是包括附件的无人驾驶飞行器的发动机装置的外视图,图5是图4的发动机装置的左视图。如图4所示,第一散热器或油冷却器67和第二散热器或油冷却器68分别用于第一气缸10和第二气缸20的冷却。排气管55包括第一排气管56和第二排气管57,它们在连接部处连接,然后转成u形并与消声器59连接。第一排气管56和第二排气管57到连接部处的长度是相同的。如图5所示,消声器59布置在发动机底部的中心,因此,飞行器的重心可不偏移地保持在前后方向上。
57.工业适用性
58.根据本发明,分别对应于第一凸轮轴和第二凸轮轴而设置的第一离心离合器和第二离心离合器,在彼此相反的方向上旋转,因此可以消除陀螺效应,飞行器的姿态控制变得容易。本发明的发动机装置适用于无人驾驶飞行器。
59.附图标记说明
60.10.第一气缸
61.11.第一活塞
62.16.第一凸轮轴
63.17.第一齿轮
64.18.第一皮带
65.20.第二气缸
66.21.第二活塞
67.26.第二凸轮轴
68.27.第二齿轮
69.28.第二皮带
70.29.换向齿轮
71.30.第一曲轴
72.31.从动齿轮
73.32.第一离心离合器轴
74.33.第一离心离合器输出齿轮
75.34.换向齿轮
76.35.轴
77.36.齿轮
78.37.驱动齿轮
79.40.第二曲轴
80.41.从动齿轮
81.42.第二离心离合器轴
82.43.第二离心离合器输出齿轮
83.47.驱动齿轮
84.50.单向离合器
85.51.单向离合器齿轮
86.52.单向离合器输出轴
87.53.驱动齿轮
88.55.排气管
89.56.第一排气管
90.57.第二排气管
91.58.连接部
92.59.消声器
93.60.最终驱动轴
94.63.从动齿轮
95.64.第一发电机
96.65.第二发电机
97.67.第一散热器或油冷却器
98.68.第二散热器或油冷却器
99.70.齿轮机构
100.71,72,73,74.螺旋桨轴
101.75.启动器
102.80.第一离心离合器
103.90.第二离心离合器
104.100.用于无人驾驶飞行器的发动机装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
