一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统
技术领域
1.本发明涉及hvaf超音速火焰喷枪技术领域,具体为一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统。
背景技术:
2.超音速火焰喷涂是由小孔进入燃烧室的液体燃烧,如煤油,经雾化与氧气混合后点燃,发生强烈的气相反应,燃烧放出的热能使产物剧烈膨胀,此膨胀气体流经laval喷嘴时受喷嘴的约束形成超音速高温焰流,此焰流加热加速喷涂材料至基体表面,形成高质量涂,超音速火焰是利用丙烷、丙烯等碳氢系燃气或氢气与高压氧气在燃烧室内,或在特殊的喷嘴中燃烧产生的高温、高速燃烧焰流,燃烧焰流速度可达五马赫(1500m/s)以上,通常被称作hvof,将粉末轴向送进该火焰,可以将喷涂粒子加热至熔化或半熔化状态,并加速到高达300-500m/s,甚至更高的速度,从而获得结合强度高、致密的高质量的涂层,在现有的hvaf超音速火焰喷枪机器人加工喷涂中需要利用视觉采集对加工前和加工时的状态进行反馈,但现有的视觉采集反馈往往是获取图像并通过人工进行反馈操作,不具备智能操控,工作效率低,且现有的视觉采集不便于对加工的工件位置进行确认,容易造成喷涂失误和浪费。
技术实现要素:
3.本发明的目的在于提供一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,以解决上述背景技术中提出的现有的视觉采集反馈往往是获取图像并通过人工进行反馈操作,不具备智能操控,工作效率低,且现有的视觉采集不便于对加工的工件位置进行确认,容易造成喷涂失误和浪费的问题。
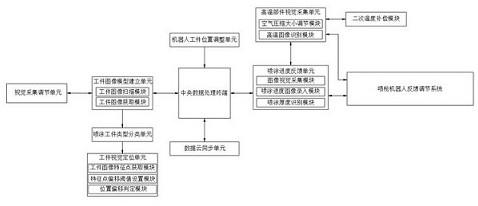
4.为实现上述目的,本发明提供如下技术方案:一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,包括机器人工件位置调整单元、中央数据处理终端、喷涂进度反馈单元、高温部件视觉采集单元、喷枪机器人反馈调节系统、工件图像模型建立单元、视觉采集调节单元、喷涂工件类型分类单元和工件视觉定位单元,所述机器人工件位置调整单元的输出端与中央数据处理终端的输入端通讯连接,所述中央数据处理终端与喷涂进度反馈单元双向连接,所述喷涂进度反馈单元与高温部件视觉采集单元双向连接,所述高温部件视觉采集单元与喷枪机器人反馈调节系统双向连接,所述中央数据处理终端与工件图像模型建立单元双向连接,所述工件图像模型建立单元与视觉采集调节单元双向连接,所述工件图像模型建立单元的输出端与喷涂工件类型分类单元的输入端通讯连接,所述喷涂工件类型分类单元的输出端与工件视觉定位单元的输入端通讯连接;所述机器人工件位置调整单元用于将需要通过喷枪机器人喷涂的工件进行位置自动调节处理;所述中央数据处理终端用于对数据进行集中储存并管理;所述喷涂进度反馈单元用于根据视觉图像对喷涂状态的进度进行识别反馈处理;
所述高温部件视觉采集单元用于对喷枪机器人的高温部件进行图像采集处理;所述喷枪机器人反馈调节系统用于对喷枪机器人的喷涂强度进行调节处理;所述工件图像模型建立单元用于对需要进行加工的工件图像信息进行获取处理;所述视觉采集调节单元用于对视觉采集的方向位置进行调节处理;所述喷涂工件类型分类单元用于根据工件图像模型建立单元获取的工件图像信息对工件进行视觉类型分类;所述工件视觉定位单元用于对工件的位置进行视觉图像定位处理,对工件的位置进行防偏移检测。
5.作为本发明的一种优选方案:所述喷涂进度反馈单元包括图像视觉采集模块、喷涂进度图像录入模块和喷涂厚度识别模块,所述图像视觉采集模块的输出端与喷涂进度图像录入模块的输入端通讯连接,所述喷涂进度图像录入模块的输出端与喷涂厚度识别模块的输入端通讯连接;所述图像视觉采集模块用于对喷涂中的工件进行图像实时采集处理;所述喷涂进度图像录入模块用于对喷涂进度参考图像进行录入,并根据喷涂中的工件图像与喷涂进度图像进行对比得出喷涂进度;所述喷涂厚度识别模块用于根据喷涂中的工件图像进行喷涂厚度识别处理。
6.作为本发明的一种优选方案:所述高温部件视觉采集单元包括空气压缩大小调节模块和高温图像识别模块,所述空气压缩大小调节模块与高温图像识别模块双向连接;所述空气压缩大小调节模块用于对喷枪机器人对空气压缩的压力大小进行调节处理;所述高温图像识别模块用于对喷涂中喷枪机器人的高温组件的高温图像进行获取,并对高温图像进行高温判定而对空气压缩大小进行调节。
7.作为本发明的一种优选方案:所述喷枪机器人反馈调节系统包括送粉量调节单元和燃烧强度调节单元,所述送粉量调节单元与燃烧强度调节单元双向连接;所述送粉量调节单元用于对喷枪机器人工作时的氮气送粉速率进行调节处理;所述燃烧强度调节单元用于对喷枪工作时的燃料输入量进行调节处理。
8.作为本发明的一种优选方案:所述燃烧强度调节单元包括丙烷量调节模块和丙烯量调节模块;所述丙烷量调节模块用于对喷枪机器人工作时的丙烷量大小进行调节处理;所述丙烯量调节模块用于对喷枪机器人工作时的丙烯量大小进行调节处理。
9.作为本发明的一种优选方案:所述工件图像模型建立单元包括工件图像扫描模块和工件图像获取模块,所述工件图像扫描模块的输出端与工件图像获取模块的输入端通讯连接;所述工件图像扫描模块用于对需要喷枪机器人进行加工的工件图像进行外形扫描处理;所述工件图像获取模块用于对外形扫描处理后的工件进行图像建立处理。
10.作为本发明的一种优选方案:所述视觉采集调节单元包括方向角度调节模块、俯仰角度调节模块和采集焦距调整模块,所述方向角度调节模块与俯仰角度调节模块双向连接,所述俯仰角度调节模块与采集焦距调整模块双向连接;
所述方向角度调节模块用于对图像进行视觉采集时将采集镜头的方向角度进行调节;所述俯仰角度调节模块用于对图像进行视觉采集时将采集镜头的俯仰角度进行调节;所述采集焦距调整模块用于对采集镜头视觉采集时的焦距进行调节处理。
11.作为本发明的一种优选方案:所述工件视觉定位单元包括工件图像特征点获取模块、特征点偏移阈值设置模块和位置偏移判定模块,所述工件图像特征点获取模块的输出端与特征点偏移阈值设置模块的输入端通讯连接,所述特征点偏移阈值设置模块的输出端与位置偏移判定模块的输入端通讯连接;所述工件图像特征点获取模块用于对工件的图像中存在的特征点进行获取标记;所述特征点偏移阈值设置模块用于依据工件图像特征点获取模块得到的特征点对工件的放置位置进行定位,并对偏移点的距离阈值进行设置;所述位置偏移判定模块用于依据设置的偏移距离阈值对工件位置的偏移情况进行判定。
12.作为本发明的一种优选方案:所述高温部件视觉采集单元双向连接有二次温度补偿模块,所述二次温度补偿模块用于对喷枪机器人喷出的焰流进行二次温度补偿处理。
13.作为本发明的一种优选方案:所述中央数据处理终端双向连接有数据云同步单元,所述数据云同步单元用于对视觉采集的数据进行云端储存并通过云端进行远程管理处理。
14.与现有技术相比,本发明的有益效果是:本发明通过加入了喷涂进度反馈单元,实现了对正在喷涂的工件的喷涂图像进行视觉采集,从而通过视觉采集的图像对喷涂的进度进行判断处理,通过加入了喷枪机器人反馈调节系统,实现了对喷涂的送粉量和燃烧料量根据喷涂状况进行调整处理,提高了反馈效率。
附图说明
15.图1为本发明整体系统框图;图2为本发明喷枪机器人反馈调节系统框图;图3为本发明视觉采集调节单元系统框图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1至图3,本发明提供一种技术方案:一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,包括机器人工件位置调整单元、中央数据处理终端、喷涂进度反馈单元、高温部件视觉采集单元、喷枪机器人反馈调节系统、工件图像模型建立单元、视觉采集调节单元、喷涂工件类型分类单元和工件视觉定位单元,机器人工件位置调整单元的输出端与中央数据处理终端的输入端通讯连接,中央数据处理终端与喷涂进度反馈单元双向
连接,喷涂进度反馈单元与高温部件视觉采集单元双向连接,高温部件视觉采集单元与喷枪机器人反馈调节系统双向连接,中央数据处理终端与工件图像模型建立单元双向连接,工件图像模型建立单元与视觉采集调节单元双向连接,工件图像模型建立单元的输出端与喷涂工件类型分类单元的输入端通讯连接,喷涂工件类型分类单元的输出端与工件视觉定位单元的输入端通讯连接;机器人工件位置调整单元用于将需要通过喷枪机器人喷涂的工件进行位置自动调节处理,通过喷枪机器人对需要进行喷涂的工件位置进行调整;中央数据处理终端用于对数据进行集中储存并管理,对数据进行集中操控,提高了系统工作的稳定性和安全性;喷涂进度反馈单元用于根据视觉图像对喷涂状态的进度进行识别反馈处理,在喷涂中对工件的喷涂图像进行实时视觉采集处理,并将喷涂进度的特性图像进行录入,根据录入的特性图像与实时采集的喷涂图像对喷涂的进度进行识别处理;高温部件视觉采集单元用于对喷枪机器人的高温部件进行图像采集处理;喷枪机器人反馈调节系统用于对喷枪机器人的喷涂强度进行调节处理;工件图像模型建立单元用于对需要进行加工的工件图像信息进行获取处理,通过工件图像模型建立单元对工件的外观图像进行扫描并将外观图像进行建立,得到工件外观图像从而对喷涂工件类型进行识别;视觉采集调节单元用于对视觉采集的方向位置进行调节处理,在视觉采集时对采集镜头的方向角度进行调节,对采集镜头的俯仰角度进行调节处理,对采集镜头采集时的焦距进行调节处理;喷涂工件类型分类单元用于根据工件图像模型建立单元获取的工件图像信息对工件进行视觉类型分类;工件视觉定位单元用于对工件的位置进行视觉图像定位处理,对工件的位置进行防偏移检测,将工件图像中的特征点进行确认,然后根据工件放置的位置对特征点进行偏移距离识别计算处理,从而对工件偏移的状况进行确认。
18.其中,喷涂进度反馈单元包括图像视觉采集模块、喷涂进度图像录入模块和喷涂厚度识别模块,图像视觉采集模块的输出端与喷涂进度图像录入模块的输入端通讯连接,喷涂进度图像录入模块的输出端与喷涂厚度识别模块的输入端通讯连接;图像视觉采集模块用于对喷涂中的工件进行图像实时采集处理;喷涂进度图像录入模块用于对喷涂进度参考图像进行录入,并根据喷涂中的工件图像与喷涂进度图像进行对比得出喷涂进度;喷涂厚度识别模块用于根据喷涂中的工件图像进行喷涂厚度识别处理,在喷涂中对工件的喷涂图像进行实时视觉采集处理,并将喷涂进度的特性图像进行录入,根据录入的特性图像与实时采集的喷涂图像对喷涂的进度进行识别处理。
19.其中,高温部件视觉采集单元包括空气压缩大小调节模块和高温图像识别模块,空气压缩大小调节模块与高温图像识别模块双向连接;空气压缩大小调节模块用于对喷枪机器人对空气压缩的压力大小进行调节处理;高温图像识别模块用于对喷涂中喷枪机器人的高温组件的高温图像进行获取,并对高温图像进行高温判定而对空气压缩大小进行调节。
20.其中,喷枪机器人反馈调节系统包括送粉量调节单元和燃烧强度调节单元,送粉量调节单元与燃烧强度调节单元双向连接;送粉量调节单元用于对喷枪机器人工作时的氮气送粉速率进行调节处理;燃烧强度调节单元用于对喷枪工作时的燃料输入量进行调节处理。
21.其中,燃烧强度调节单元包括丙烷量调节模块和丙烯量调节模块;丙烷量调节模块用于对喷枪机器人工作时的丙烷量大小进行调节处理;丙烯量调节模块用于对喷枪机器人工作时的丙烯量大小进行调节处理。
22.其中,工件图像模型建立单元包括工件图像扫描模块和工件图像获取模块,工件图像扫描模块的输出端与工件图像获取模块的输入端通讯连接;工件图像扫描模块用于对需要喷枪机器人进行加工的工件图像进行外形扫描处理;工件图像获取模块用于对外形扫描处理后的工件进行图像建立处理,通过工件图像模型建立单元对工件的外观图像进行扫描并将外观图像进行建立,得到工件外观图像从而对喷涂工件类型进行识别。
23.其中,视觉采集调节单元包括方向角度调节模块、俯仰角度调节模块和采集焦距调整模块,方向角度调节模块与俯仰角度调节模块双向连接,俯仰角度调节模块与采集焦距调整模块双向连接;方向角度调节模块用于对图像进行视觉采集时将采集镜头的方向角度进行调节;俯仰角度调节模块用于对图像进行视觉采集时将采集镜头的俯仰角度进行调节;采集焦距调整模块用于对采集镜头视觉采集时的焦距进行调节处理,在视觉采集时对采集镜头的方向角度进行调节,对采集镜头的俯仰角度进行调节处理,对采集镜头采集时的焦距进行调节处理。
24.其中,工件视觉定位单元包括工件图像特征点获取模块、特征点偏移阈值设置模块和位置偏移判定模块,工件图像特征点获取模块的输出端与特征点偏移阈值设置模块的输入端通讯连接,特征点偏移阈值设置模块的输出端与位置偏移判定模块的输入端通讯连接;工件图像特征点获取模块用于对工件的图像中存在的特征点进行获取标记;特征点偏移阈值设置模块用于依据工件图像特征点获取模块得到的特征点对工件的放置位置进行定位,并对偏移点的距离阈值进行设置;位置偏移判定模块用于依据设置的偏移距离阈值对工件位置的偏移情况进行判定,将工件图像中的特征点进行确认,然后根据工件放置的位置对特征点进行偏移距离识别计算处理,从而对工件偏移的状况进行确认。
25.其中,高温部件视觉采集单元双向连接有二次温度补偿模块,二次温度补偿模块用于对喷枪机器人喷出的焰流进行二次温度补偿处理。
26.其中,中央数据处理终端双向连接有数据云同步单元,数据云同步单元用于对视觉采集的数据进行云端储存并通过云端进行远程管理处理。
27.实施例s1、通过喷枪机器人对需要进行喷涂的工件位置进行调整,通过工件图像模型建立单元对工件的外观图像进行扫描并将外观图像进行建立,得到工件外观图像从而对喷涂
工件类型进行识别;s2、在视觉采集时对采集镜头的方向角度进行调节,对采集镜头的俯仰角度进行调节处理,对采集镜头采集时的焦距进行调节处理;s3、将工件图像中的特征点进行确认,然后根据工件放置的位置对特征点进行偏移距离识别计算处理,从而对工件偏移的状况进行确认;s4、在喷涂中对工件的喷涂图像进行实时视觉采集处理,并将喷涂进度的特性图像进行录入,根据录入的特性图像与实时采集的喷涂图像对喷涂的进度进行识别处理;s5、在喷涂中对高温图像进行识别处理,从而对空气压缩大小进行调节,根据喷涂状况对送粉量进行调节,对燃烧强度调节时,调节丙烷和丙烯的量。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。