技术特征:
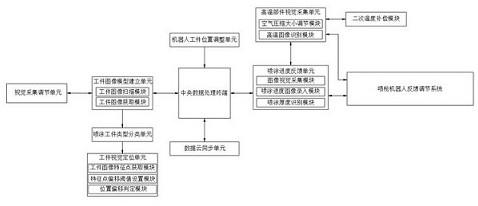
1.一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于,包括机器人工件位置调整单元、中央数据处理终端、喷涂进度反馈单元、高温部件视觉采集单元、喷枪机器人反馈调节系统、工件图像模型建立单元、视觉采集调节单元、喷涂工件类型分类单元和工件视觉定位单元,所述机器人工件位置调整单元的输出端与中央数据处理终端的输入端通讯连接,所述中央数据处理终端与喷涂进度反馈单元双向连接,所述喷涂进度反馈单元与高温部件视觉采集单元双向连接,所述高温部件视觉采集单元与喷枪机器人反馈调节系统双向连接,所述中央数据处理终端与工件图像模型建立单元双向连接,所述工件图像模型建立单元与视觉采集调节单元双向连接,所述工件图像模型建立单元的输出端与喷涂工件类型分类单元的输入端通讯连接,所述喷涂工件类型分类单元的输出端与工件视觉定位单元的输入端通讯连接;所述机器人工件位置调整单元用于将需要通过喷枪机器人喷涂的工件进行位置自动调节处理;所述中央数据处理终端用于对数据进行集中储存并管理;所述喷涂进度反馈单元用于根据视觉图像对喷涂状态的进度进行识别反馈处理;所述高温部件视觉采集单元用于对喷枪机器人的高温部件进行图像采集处理;所述喷枪机器人反馈调节系统用于对喷枪机器人的喷涂强度进行调节处理;所述工件图像模型建立单元用于对需要进行加工的工件图像信息进行获取处理;所述视觉采集调节单元用于对视觉采集的方向位置进行调节处理;所述喷涂工件类型分类单元用于根据工件图像模型建立单元获取的工件图像信息对工件进行视觉类型分类;所述工件视觉定位单元用于对工件的位置进行视觉图像定位处理,对工件的位置进行防偏移检测。2.根据权利要求1所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述喷涂进度反馈单元包括图像视觉采集模块、喷涂进度图像录入模块和喷涂厚度识别模块,所述图像视觉采集模块的输出端与喷涂进度图像录入模块的输入端通讯连接,所述喷涂进度图像录入模块的输出端与喷涂厚度识别模块的输入端通讯连接;所述图像视觉采集模块用于对喷涂中的工件进行图像实时采集处理;所述喷涂进度图像录入模块用于对喷涂进度参考图像进行录入,并根据喷涂中的工件图像与喷涂进度图像进行对比得出喷涂进度;所述喷涂厚度识别模块用于根据喷涂中的工件图像进行喷涂厚度识别处理。3.根据权利要求2所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述高温部件视觉采集单元包括空气压缩大小调节模块和高温图像识别模块,所述空气压缩大小调节模块与高温图像识别模块双向连接;所述空气压缩大小调节模块用于对喷枪机器人对空气压缩的压力大小进行调节处理;所述高温图像识别模块用于对喷涂中喷枪机器人的高温组件的高温图像进行获取,并对高温图像进行高温判定而对空气压缩大小进行调节。4.根据权利要求3所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述喷枪机器人反馈调节系统包括送粉量调节单元和燃烧强度调节单元,所述送粉量调节单元与燃烧强度调节单元双向连接;
所述送粉量调节单元用于对喷枪机器人工作时的氮气送粉速率进行调节处理;所述燃烧强度调节单元用于对喷枪工作时的燃料输入量进行调节处理。5.根据权利要求4所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述燃烧强度调节单元包括丙烷量调节模块和丙烯量调节模块;所述丙烷量调节模块用于对喷枪机器人工作时的丙烷量大小进行调节处理;所述丙烯量调节模块用于对喷枪机器人工作时的丙烯量大小进行调节处理。6.根据权利要求5所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述工件图像模型建立单元包括工件图像扫描模块和工件图像获取模块,所述工件图像扫描模块的输出端与工件图像获取模块的输入端通讯连接;所述工件图像扫描模块用于对需要喷枪机器人进行加工的工件图像进行外形扫描处理;所述工件图像获取模块用于对外形扫描处理后的工件进行图像建立处理。7.根据权利要求6所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述视觉采集调节单元包括方向角度调节模块、俯仰角度调节模块和采集焦距调整模块,所述方向角度调节模块与俯仰角度调节模块双向连接,所述俯仰角度调节模块与采集焦距调整模块双向连接;所述方向角度调节模块用于对图像进行视觉采集时将采集镜头的方向角度进行调节;所述俯仰角度调节模块用于对图像进行视觉采集时将采集镜头的俯仰角度进行调节;所述采集焦距调整模块用于对采集镜头视觉采集时的焦距进行调节处理。8.根据权利要求7所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述工件视觉定位单元包括工件图像特征点获取模块、特征点偏移阈值设置模块和位置偏移判定模块,所述工件图像特征点获取模块的输出端与特征点偏移阈值设置模块的输入端通讯连接,所述特征点偏移阈值设置模块的输出端与位置偏移判定模块的输入端通讯连接;所述工件图像特征点获取模块用于对工件的图像中存在的特征点进行获取标记;所述特征点偏移阈值设置模块用于依据工件图像特征点获取模块得到的特征点对工件的放置位置进行定位,并对偏移点的距离阈值进行设置;所述位置偏移判定模块用于依据设置的偏移距离阈值对工件位置的偏移情况进行判定。9.根据权利要求8所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述高温部件视觉采集单元双向连接有二次温度补偿模块,所述二次温度补偿模块用于对喷枪机器人喷出的焰流进行二次温度补偿处理。10.根据权利要求9所述的一种用于hvaf超音速火焰喷枪机器人的视觉采集反馈系统,其特征在于:所述中央数据处理终端双向连接有数据云同步单元,所述数据云同步单元用于对视觉采集的数据进行云端储存并通过云端进行远程管理处理。
技术总结
本发明公开了一种用于HVAF超音速火焰喷枪机器人的视觉采集反馈系统,包括机器人工件位置调整单元、中央数据处理终端、喷涂进度反馈单元、高温部件视觉采集单元、喷枪机器人反馈调节系统、工件图像模型建立单元、视觉采集调节单元、喷涂工件类型分类单元和工件视觉定位单元,本发明的有益效果是:通过加入了喷涂进度反馈单元,实现了对正在喷涂的工件的喷涂图像进行视觉采集,从而通过视觉采集的图像对喷涂的进度进行判断处理,通过加入了喷枪机器人反馈调节系统,实现了对喷涂的送粉量和燃烧料量根据喷涂状况进行调整处理,提高了反馈效率。率。率。
技术研发人员:谢剑明 包鸣波 李超军
受保护的技术使用者:苏州迈烨鑫新材料有限公司
技术研发日:2022.11.18
技术公布日:2023/1/13
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。