技术特征:
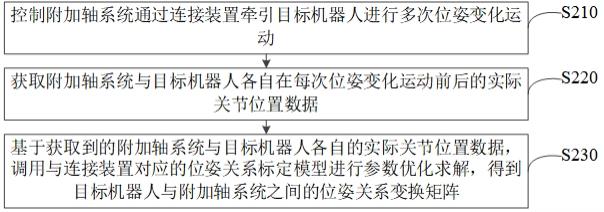
1.一种位姿关系标定方法,其特征在于,所述标定方法包括:控制附加轴系统通过连接装置牵引目标机器人进行多次位姿变化运动,其中所述连接装置用于连接所述目标机器人的机器人末端和所述附加轴系统的输出末端;获取所述附加轴系统与所述目标机器人各自在每次位姿变化运动前后的实际关节位置数据;基于获取到的所述附加轴系统与所述目标机器人各自的实际关节位置数据,调用与所述连接装置对应的位姿关系标定模型进行参数优化求解,得到所述目标机器人与所述附加轴系统之间的位姿关系变换矩阵。2.根据权利要求1所述的标定方法,其特征在于,针对每次位姿变化运动,控制所述附加轴系统通过所述连接装置牵引所述目标机器人实现该位姿变化运动的步骤,包括:控制所述附加轴系统执行与该位姿变化运动对应的附加轴运动操作;获取所述连接装置检测到的与所述附加轴运动操作对应的牵引力数据;根据所述牵引力数据计算所述目标机器人的机器人末端在机器人基座坐标系下的期望速度数据;根据所述机器人末端在机器人基座坐标系下的当前位姿数据及期望速度数据,计算所述机器人末端在机器人基座坐标系下的与所述附加轴运动操作匹配的期望位姿数据;按照所述机器人末端在机器人基座坐标系下的期望位姿数据,基于机器人逆运动学原理控制所述目标机器人的各机器人关节进行运动,以完成该位姿变化运动。3.根据权利要求2所述的标定方法,其特征在于,所述根据所述牵引力数据计算所述目标机器人的机器人末端在机器人基座坐标系下的期望速度数据的步骤,包括:调用所述机器人末端在机器人末端坐标系下的末端作用力参数与末端速度参数之间的关联关系,计算所述机器人末端在机器人末端坐标系下的与所述牵引力数据对应的目标速度数据;根据所述目标机器人的机器人末端坐标系与机器人基座坐标系之间的当前齐次变换矩阵,对所述机器人末端在机器人末端坐标系下的目标速度数据进行数据变换处理,得到所述机器人末端在机器人基座坐标系下的期望速度数据。4.根据权利要求2所述的标定方法,其特征在于,所述按照所述机器人末端在机器人基座坐标系下的期望位姿数据,基于机器人逆运动学原理控制所述目标机器人的各机器人关节进行运动的步骤,包括:基于机器人逆运动学原理对所述机器人末端在机器人基座坐标系下的期望位姿数据进行逆运动学求解,得到所述目标机器人的各机器人关节的期望关节位置;针对所述目标机器人的每个机器人关节,按照该机器人关节的期望关节位置调整该机器人关节的当前关节位置。5.根据权利要求1-4中任意一项所述的标定方法,其特征在于,所述基于获取到的所述附加轴系统与所述目标机器人各自的实际关节位置数据,调用与所述连接装置对应的位姿关系标定模型进行参数优化求解,得到所述目标机器人与所述附加轴系统之间的位姿关系变换矩阵的步骤,包括:针对每次位姿变化运动,根据所述目标机器人在该位姿变化运动前后的实际关节位置数据,基于机器人正向运动学原理计算得到所述目标机器人的机器人末端坐标系与机器人
基座坐标系之间的第一运动前齐次变换矩阵及第一运动后齐次变换矩阵;针对每次位姿变化运动,根据所述附加轴系统在该位姿变化运动前后的实际关节位置数据,基于改进型d-h参数法计算得到所述附加轴系统的输出末端坐标系与附加轴基座坐标系之间的第二运动前齐次变换矩阵及第二运动后齐次变换矩阵;针对每次位姿变化运动,将与该位姿变化运动对应的所述第一运动前齐次变换矩阵、所述第二运动前齐次变换矩阵、所述第一运动后齐次变换矩阵及所述第二运动后齐次变换矩阵代入到所述位姿关系标定模型中,构建形成关于所述附加轴基座坐标系与所述机器人基座坐标系之间的目标齐次变换矩阵的待求解方程;将所有位姿变化运动各自对应的待求解方程集成为目标方程组进行非线性优化求解,并将求解得到的目标齐次变换矩阵作为所述位姿关系变换矩阵。6.根据权利要求5所述的标定方法,其特征在于,所述位姿关系标定模型采用如下式子进行表达:;其中,用于表示与第i次位姿变化运动对应的机器人末端坐标系t和机器人基座坐标系b之间的第一运动前齐次变换矩阵,用于表示与第i次位姿变化运动对应的机器人末端坐标系t和机器人基座坐标系b之间的第一运动后齐次变换矩阵,用于表示与第i次位姿变化运动对应的输出末端坐标系c与附加轴基座坐标系d之间的第二运动前齐次变换矩阵,用于表示与第i次位姿变化运动对应的输出末端坐标系c与附加轴基座坐标系d之间的第二运动后齐次变换矩阵,用于表示附加轴基座坐标系d与机器人基座坐标系b之间的目标齐次变换矩阵,其中所述目标齐次变换矩阵为所述目标机器人与所述附加轴系统之间的位姿关系变换矩阵。7.一种位姿关系标定装置,其特征在于,所述标定装置包括:运动控制模块,用于控制附加轴系统通过连接装置牵引目标机器人进行多次位姿变化运动,其中所述连接装置用于连接所述目标机器人的机器人末端和所述附加轴系统的输出末端;数据获取模块,用于获取所述附加轴系统与所述目标机器人各自在每次位姿变化运动前后的实际关节位置数据;关系标定模块,用于基于获取到的所述附加轴系统与所述目标机器人各自的实际关节位置数据,调用与所述连接装置对应的位姿关系标定模型进行参数优化求解,得到所述目标机器人与所述附加轴系统之间的位姿关系变换矩阵。8.根据权利要求7所述的标定装置,其特征在于,所述位姿关系标定模型采用如下式子进行表达:;
其中,用于表示与第i次位姿变化运动对应的机器人末端坐标系t和机器人基座坐标系b之间的第一运动前齐次变换矩阵,用于表示与第i次位姿变化运动对应的机器人末端坐标系t和机器人基座坐标系b之间的第一运动后齐次变换矩阵,用于表示与第i次位姿变化运动对应的输出末端坐标系c与附加轴基座坐标系d之间的第二运动前齐次变换矩阵,用于表示与第i次位姿变化运动对应的输出末端坐标系c与附加轴基座坐标系d之间的第二运动后齐次变换矩阵,用于表示附加轴基座坐标系d与机器人基座坐标系b之间的目标齐次变换矩阵,其中所述目标齐次变换矩阵为所述目标机器人与所述附加轴系统之间的位姿关系变换矩阵。9.一种计算机设备,其特征在于,包括处理器和存储器,所述存储器存储有能够被所述处理器执行的计算机程序,所述处理器可执行所述计算机程序,以实现权利要求1-6中任意一项所述的位姿关系标定方法。10.一种可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现权利要求1-6中任意一项所述的位姿关系标定方法。
技术总结
本申请提供一种位姿关系标定方法及装置、计算机设备和可读存储介质,涉及机器人控制技术领域。本申请通过连接装置连接目标机器人的机器人末端和附加轴系统的输出末端,并控制附加轴系统通过连接装置牵引目标机器人进行多次位姿变化运动,以获取附加轴系统与目标机器人各自在每次位姿变化运动前后的实际关节位置数据,而后直接基于获取到的附加轴系统与目标机器人各自的实际关节位置数据,调用与连接装置对应的位姿关系标定模型进行参数优化求解,得到目标机器人与附加轴系统之间的位姿关系变换矩阵,从而有效避免现有位姿关系标定过程中的繁琐示教操作,并提升位姿关系的标定精准度及标定效率。准度及标定效率。准度及标定效率。
技术研发人员:韩冰 于晓龙 郭昱亮 牛建伟 任涛 杨帆 马群
受保护的技术使用者:北京航空航天大学杭州创新研究院
技术研发日:2022.11.29
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。