1.本实用新型涉及自动化机械加工制造技术领域,具体涉及一种用于摇篮式五轴机床加工单元的机械手搬运工装。
背景技术:
2.自动化无人加工单位或产线是当前工业4.0的发展方向,摇篮式五轴数控机床因一次安装可完成大部分加工工序而在自动加工单元得到重要应用,由1台机械手和3台品字形布局的五轴数控机床可形成一个强大加工功能的自动加工单元,该单元机械手负责搬运由agv运送来的托盘及工件,需要设计机械手搬运工装解决托盘搬运过程中定位、夹紧、托盘识别等功能。
技术实现要素:
3.本实用新型的目的在于克服现有技术的不足,适应现实需要,提供一种用于摇篮式五轴机床加工单元的机械手搬运工装,将夹紧气缸通过基板固定于机械臂的末端,夹紧气缸能够驱动两侧的安装于其上的卡爪对托盘进行夹持,然后通过机械臂搬运至五轴机床的加工单元上进行加工;通过在基板上固定读码器能够读取托盘上的电子标签卡,读码器读取每个托盘的电子标签卡后,由总控程序来执行相应的操作,从而实现搬运工装对托盘搬运过程中的定位、夹紧和托盘识别等功能。
4.为了实现本实用新型的目的,本实用新型所采用的技术方案为:
5.设计一种用于摇篮式五轴机床加工单元的机械手搬运工装,包括机械臂、基板、夹紧气缸、卡爪和读码器,
6.所述机械臂的底部固定于地面上,其末端与所述基板的内壁上方相连,所述基板外壁与夹紧气缸相连,所述夹紧气缸的前端两侧连接有卡爪,两个所述卡爪通过夹紧气缸驱动其相向运动与托盘的两侧卡接;
7.所述托盘的侧壁上设有电子标签卡,所述基板外侧连接有能够读取所述电子标签卡的读码器。
8.所述托盘的侧壁上设有环形卡接槽,所述环形卡接槽的宽度与所述卡爪的厚度相等;所述环形卡接槽的两侧设有平槽,所述卡爪的内壁外端设有与所述平槽匹配卡合的凹槽。
9.所述平槽的中部形成呈“v”字型的凸起部;所述凹槽的内壁中部形成与所述凸起部相配合的下凹部。
10.所述基座的底部连接有底板,所述底板与基板组成“l”形结构,所述基板的上表面前端通过角板与所述读码器相连;所述卡爪的内壁内端设有大于所述读码器宽度的防撞槽。
11.所述基板的外壁下方两侧沿着竖直方向设有气动滑台,所述夹紧气缸的内壁固定于所述气动滑台的外壁上能够跟随气动滑台沿着竖直方向运动,所述夹紧气缸的底部与所
述底板的顶部之间连接有缓冲弹簧。
12.所述托盘的底部轴向设有拉钉,所述拉钉与五轴机床上的连接卡盘相连;一侧的所述卡爪底部连接有气嘴。
13.本实用新型的有益效果在于:
14.1.本实用新型将夹紧气缸通过基板固定于机械臂的末端,夹紧气缸能够驱动两侧的安装于其上的卡爪对托盘进行夹持,然后通过机械臂搬运至五轴机床的加工单元上进行加工;通过在基板上固定读码器能够读取托盘上的电子标签卡,读码器读取每个托盘的电子标签卡后,由总控程序来执行相应的操作,从而实现搬运工装对托盘搬运过程中的定位、夹紧和托盘识别等功能。
附图说明
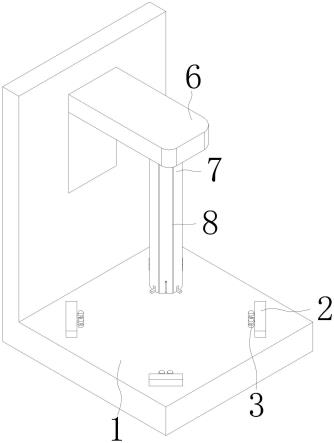
15.图1为本实用新型的结构示意图;
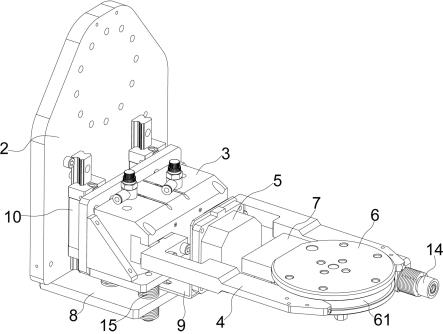
16.图2为本实用新型的部分结构示意图;
17.图3为本实用新型中卡爪与托盘夹持处的部分结构剖面图;
18.图4为本实用新型的使用状态图;
19.图5为本实用新型中托盘的结构示意图;
20.图6为本实用新型中连接卡盘的结构示意图。
21.图中,1机械臂,2基板,3夹紧气缸,4卡爪,5读码器,6托盘,7电子标签卡,8底板,9角板,10气动滑台,11拉钉,12五轴机床,13连接卡盘,14气嘴,15缓冲弹簧,41凹槽,42下凹部,43防撞槽,61环形卡接槽,62平槽,63凸起部。
具体实施方式
22.下面结合附图和实施例对本实用新型进一步说明:
23.实施例:一种用于摇篮式五轴机床加工单元的机械手搬运工装,参见图1-图6,
24.本设计包括机械臂1、基板2、夹紧气缸3、卡爪4和读码器5,
25.所述机械臂1的底部固定于地面上,其末端与所述基板2的内壁上方相连,所述基板2外壁与夹紧气缸3相连,所述夹紧气缸3的前端两侧连接有卡爪4,两个所述卡爪4通过夹紧气缸3驱动其相向运动与托盘6的两侧卡接,本案将夹紧气缸3通过基板2固定于机械臂1的末端,夹紧气缸3能够驱动两侧的安装于其上的卡爪4对托盘6进行夹持,然后通过机械臂1搬运至五轴机床11的加工单元上进行加工,本实施例中夹紧气缸3为现有技术,其工作原理不再赘述。
26.所述托盘6的侧壁上设有电子标签卡7,所述基板2外侧连接有能够读取所述电子标签卡7的读码器5,通过在基板2上固定读码器5能够读取托盘6上的电子标签卡7,托盘6及零件送到中转台时,总控程序调度机械臂1搬运托盘6及零件时,读码器5读取每个托盘6的电子标签卡7后,由总控程序来执行相应的操作,本实施例中读码器5为rfid读码器,从而实现搬运工装对托盘6搬运过程中的定位、夹紧和托盘识别等功能。
27.进一步的,托盘6的侧壁上设有环形卡接槽61,所述环形卡接槽61的宽度与所述卡爪4的厚度相等,通过卡爪4插入环形卡接槽61内,使得卡爪4与托盘6在竖直方向形成限位;所述环形卡接槽61的两侧设有平槽62,所述卡爪4的内壁外端设有与所述平槽62匹配卡合
的凹槽41,通过平槽62和凹槽41匹配卡合,能够使得卡爪4与托盘6在水平方向形成限位,从而降低机械臂1在将托盘6搬运至五轴机床12的加工台的过程中掉落的可能性。
28.进一步的,平槽62的中部形成呈“v”字型的凸起部63;所述凹槽41的内壁中部形成与所述凸起部63相配合的下凹部42,通过凸起部63和下凹部42匹配卡合,能够进一步的提升卡爪4与托盘6之间夹紧强度,确保机械臂1在将托盘6搬运至五轴机床12的加工台的过程中不会掉落。
29.进一步的,基座2的底部连接有底板8,所述底板8与基板2组成“l”形结构,所述基板2的上表面前端通过角板9与所述读码器5相连,将读码器5固定于卡爪4之间,便于读码器5读取托盘6上电子标签卡7的信息;所述卡爪4的内壁内端设有大于所述读码器5宽度的防撞槽43,确保卡爪4在夹紧托盘6时,卡爪4的内壁不会与读码器5的外壁发生碰撞。
30.进一步的,基板2的外壁下方两侧沿着竖直方向设有气动滑台10,所述夹紧气缸3的内壁固定于所述气动滑台10的外壁上能够跟随气动滑台10沿着竖直方向运动,所述夹紧气缸3的底部与所述底板8的顶部之间连接有缓冲弹簧15,防止托盘锁止,机械手强行端起来损坏搬运工装的机构。
31.进一步的,托盘6的底部轴向设有拉钉11,所述拉钉11与五轴机床12上的连接卡盘13相连;一侧的所述卡爪4底部连接有气嘴14,本实施例中的连接卡盘13为现有技术,采用的是a-one公司的3a-100050e型150强力卡盘,托盘6与连接卡盘13的具体连接方式为:托盘6底部有圆周径向分布的相互垂直的四个键槽,与连接卡盘13上的的四个凸起配合,实现定位功能。托盘6底部轴向设置拉钉11,连接卡盘13的中心位置内部有碟形弹簧与滚珠,实现拉钉的夹紧。机械臂1把托盘6及零件定位到连接卡盘13上方时,设置在卡爪4上的的气嘴14与连接卡盘13前端单向阀接口接合,在达到规定的气压后,单向阀开启,连接卡盘13内部滚珠落下,此时可以进行放件。托盘6放下后,卡爪4松开托盘6,进行旋转位移后,另一侧的卡爪4前端方形块与连接卡盘13另一侧配合,把刚吹进的气体排出后,实现托盘6的夹紧,最终实现托盘6的零点定位与夹紧。
32.本实用新型的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本实用新型的精神,并做出不同的引申和变化,但只要不脱离本实用新型的精神,都在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。