1.本实用新型涉及扫描振镜领域,特别涉及一种振镜电机反射镜片垂直角度检测装置。
背景技术:
2.随着科技发展,社会进步,扫描振镜的应用领域已经扩展极为广泛,目前市场上扫描振镜主要应用于打标、快速成型(增材制造)、3d投影等领域,因此如何提升更高定位精度、加工速度对扫描振镜制造商而言是一项富有挑战性的任务,而扫描振镜产品中核心之重的部件振镜电机的品质则是决定定位精度、加工速度的关键因素;
3.国产扫描振镜与进口国外知名品牌扫描振镜的性能差异关键因素之一,在于振镜电机反射镜片垂直角度的制造标准。
4.传统的光学以及结构测量仪器,成本昂贵,设备体积庞大,操作繁琐,校验过程复杂。
技术实现要素:
5.为克服上述缺点,本实用新型的目的在于提供一种能够快速检测振镜电机光学特性品质、快速量化振镜电机反射镜片偏心角度、快速检测振镜电机角度控制误差的振镜电机反射镜片垂直角度检测装置。
6.为了达到以上目的,本实用新型采用的技术方案是:一种振镜电机反射镜片垂直角度检测装置,包括底座,所述底座上设置有同轴校准固定板,所述同轴校准固定板上设置有第一通孔,所述同轴校准固定板的一侧设置有激光自准直仪组件,所述同轴校准固定板远离激光自准直仪组件的一侧设置有电机固定座,所述激光自准直仪组件内的激光光束穿过同轴校准固定板和电机固定座,所述振镜电机反射镜片垂直角度检测装置还包括准星组件。
7.进一步的是:所述激光自准直仪组件包括自准直仪框架,所述自准直仪框架内设置有激光器,所述激光器靠近同轴校准固定板的一侧设置有半反半透镜,所述半反半透镜倾斜设置,所述半反半透镜的上方设置有聚焦镜,所述自准直仪框架上位于聚焦镜的上方设置有第二通孔,所述第二通孔内设置有标准刻度准星盘,经过半反半透镜反射的激光光束穿过聚焦镜和标准刻度准星盘,所述自准直仪框架靠近同轴校准固定板的一侧设置有第三通孔。
8.进一步的是:所述半反半透镜与激光器发出的激光呈45度角设置,所述半反半透镜向远离同轴校准固定板的方向倾斜设置。
9.进一步的是:所述电机固定座上设置有第四通孔和第五通孔。
10.进一步的是:所述准星组件包括设置在第三通孔内的第一准星、设置在第四通孔内的第二准星和设置在第五通孔内的第三准星,所述第一准星、第二准星和第三准星同轴。
11.进一步的是:所述标准刻度准星盘上设置有准星盘x轴和准星盘y轴。
12.进一步的是:所述电机固定座上设置有用于放置电机的电机固定孔,所述电机固定孔的一侧设置有用于固定电机的压片板。
13.本实用新型的有益效果是,本技术结构简单,装配简单,成本低,使用操作过程简单直观,工具校验便捷,能够快速检测振镜电机光学特性品质,能够快速量化检测振镜电机反射镜片偏心角度,能够快速检测振镜电机角度控制误差。
附图说明
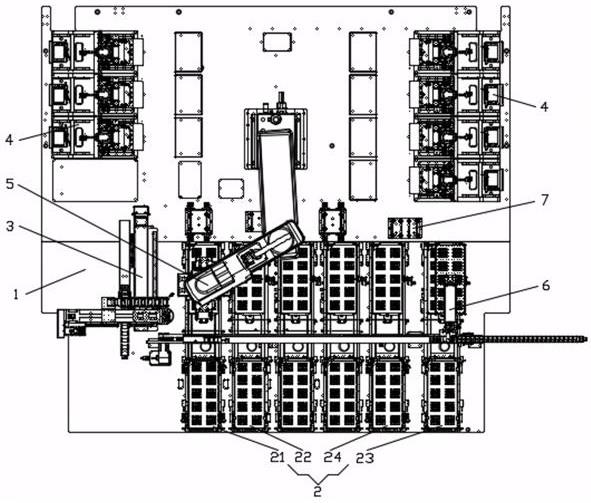
14.图1为本实用新型一实施例的整体结构示意图;
15.图2为标准刻度准星盘的示意图;
16.图中:1、底座;2、同轴校准固定板;3、电机固定座;4、激光自准直仪模块;5、压片板;6、激光器;7、激光光束;8、半反半透镜;9、振镜电机;10、第一准星;11、第二准星;12、第三准星;13、振镜电机反射镜;14、聚焦镜;15、标准刻度准星盘;16、准星盘x轴;17、准星盘y轴;18、自准直仪框架。
具体实施方式
17.下面结合附图对本实用新型的较佳实施例进行详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围做出更为清楚明确的界定。
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性,此外,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
19.参见附图1所示,本实施例提供了一种振镜电机反射镜片垂直角度检测装置,该振镜电机反射镜片垂直角度检测装置包括底座1,所述底座1上设置有同轴校准固定板2,所述同轴校准固定板2上设置有第一通孔,供激光光束7通过。所述同轴校准固定板2的一侧设置有激光自准直仪组件,所述激光自准直仪组件用于检测反射的激光光束7与原激光光束7的位置差,通过量测激光光束7聚焦光斑与所述激光自准直仪组件中心点的位置误差距离l,可以计算出振镜电机反射镜13垂直偏心角度c,垂直偏心角度c如何计算在下文中体现。通过量测激光光束7聚焦光斑中心点与激光自准直仪组件y轴垂直距离h,即可计算出振镜电机9实际偏摆角度t,振镜电机实际偏摆角度如何计算在下文中体现。所述同轴校准固定板2远离激光自准直仪组件的一侧设置有电机固定座3,所述电机固定座3用于固定振镜电机,所述激光自准直仪组件内的激光光束7穿过同轴校准固定板2和电机固定座3,所述振镜电机反射镜垂直角度检测装置还包括准星组件,所述准星组件用于在检测振镜电机9之前将激光光束7调节成水平状态,使得激光光束7与振镜电机反射镜13垂直。在激光光束7调节成
水平状态后将准星组件取掉。
20.在上述基础上,所述激光自准直仪组件包括自准直仪框架18,所述自准直仪框架18内设置有激光器6,所述激光器6用于发出激光光束7,所述激光器6靠近同轴校准固定板2的一侧设置有半反半透镜8,所述半反半透镜8倾斜设置,所述半反半透镜8既能使得激光光束7通过也能折射激光光束7,所述半反半透镜8的上方设置有聚焦镜14,使用聚焦镜14便于观察激光光束7聚焦光斑。所述自准直仪框架18上位于聚焦镜14的上方设置有第二通孔,所述第二通孔内设置有标准刻度准星盘15。
21.所述激光器6发射激光光束7,所述激光光束7穿过半反半透镜8、第一准星10和第二准星11发射到振镜电机反射镜13上,激光光束7在振镜电机反射镜13处反射穿过第二准星11和第一准星10,然后经过半反半透镜8反射,激光光束反射后穿过聚焦镜14,在标准刻度准星盘15上成聚焦光斑。通过量测激光光束7聚焦光斑与标准刻度准星盘15中心点的位置误差距离l,可以计算出振镜电机反射镜13垂直偏心角度c。驱动振镜电机9转动一定角度r时,通过量测激光光束7聚焦光斑中心点与准星盘y轴17垂直距离h,即可计算出振镜电机9实际偏摆角度t=arctan(h/b),比较r与t的数值差异即可得到振镜电机9的控制误差。所述自准直仪框架18靠近同轴校准固定板2的一侧设置有第三通孔。
22.在上述基础上,所述半反半透镜8与激光器6发出的激光呈45度角设置,所述半反半透镜8向远离同轴校准固定板2的方向倾斜设置,使得水平激光光束7折射后经过聚焦镜14,可以在标准刻度准星盘15上成聚焦光斑。
23.在上述基础上,所述电机固定座上设置有第四通孔和第五通孔,所述第四通孔用于放置第二准星11,所述第五通孔用于放置第三准星12。
24.在上述基础上,所述准星组件包括设置在第三通孔内的第一准星10、设置在第四通孔内的第二准星11和设置在第五通孔内的第三准星12,所述第一准星10、第二准星11和第三准星12同轴,在检测振镜电机9之前通过调整电机固定座3的位置使得第一准星10、第二准星11和第三准星12保持过孔圆心同轴且在同一水平面上。调整完成后将第一准星10、第二准星11和第三准星12取下。
25.在上述基础上,所述标准刻度准星盘15上设置有准星盘x轴16和准星盘y轴17,通过量测激光光束7聚焦光斑与标准刻度准星盘15中心点在准星盘x轴16上的位置误差距离l,可以计算出振镜电机反射镜13垂直偏心角度c。驱动振镜电机9转动一定角度r时,通过量测激光光束7聚焦光斑中心点与准星盘y轴17垂直距离h,即可计算出振镜电机9实际偏摆角度t=arctan(h/b),比较r与t的数值差异即可得到振镜电机9的控制误差。
26.在上述基础上,所述电机固定座3上设置有用于放置电机的电机固定孔,所述电机固定孔的一侧设置有用于固定电机的压片板5,所述压片板5用于压住振镜电机9,使得振镜电机9处于指定的位置和指定的角度,从而使得检测的更准确。
27.工作原理:
28.同轴校准固定板2位于底座1上方中心偏右侧固定,电机固定座3位于位于底座1上方左侧固定,调整电机固定座3使第二准星11与第三准星12以及第一准星10保持过孔圆心同轴且在同一水平面,激光自准直仪组件4位于底座1上方右侧固定,低功率激光器6位于激光自准直仪组件4内部最右侧,半反半透镜8位于激光自准直仪组件4内部在低功率激光器6左侧,且低功率激光器6发出的激光光束7经过半反半透镜8中心,半反半透镜8的镜面的上
端朝右侧倾斜与激光光束7成45
°
夹角,激光光束7穿过第一准星10与第二准星11且保持中心同轴,待检测振镜电机9放置于电机固定座3上方装配孔内,由压片板5辅助固定,振镜电机反射镜13位于待检测振镜电机9垂直向中心下方,标准刻度准星盘15位于激光自准直仪组件4天侧顶部,聚焦镜14位于激光自准直仪组件4内部在半反半透镜8与标准刻度准星盘15之间,且聚焦镜14以及标准刻度准星盘15与半反半透镜8中心点垂直向保持同轴,从激光自准直仪组件4上方垂直向下观察,准星盘x轴16与低功率激光器6发出的激光光束7垂直,准星盘y轴17与准星盘x轴16中心垂直交叉且对称,准星盘y轴17与准星盘x轴16由最小刻度a细分,此处最小刻度a参考为1mm间距。振镜电机反射镜13反射面与半反半透镜8中心点位置距离b保持固定,此处位置距离b参考600mm,调整待检测振镜电机9旋转角度,激光光束7通过振镜电机反射镜13反射,再经过半反半透镜8折射,经过聚焦镜14聚焦投影在标准刻度准星盘15上光斑与准星盘x轴16重合,通过量测激光光束7聚焦光斑与标准刻度准星盘15中心点的位置误差距离l,可以计算出振镜电机反射镜13垂直偏心角度c=arctan(l/b),l为0时偏心角度c为0,即振镜电机反射镜13标准垂直,同理驱动振镜电机9转动一定角度r时,通过量测激光光束7聚焦光斑中心点与准星盘x轴16垂直距离h,即可计算出振镜电机9实际偏摆角度t=arctan(h/b),比较r与t的数值差异即可得到振镜电机9的控制误差。
29.以上实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人了解本实用新型的内容并加以实施,并不能以此限制本实用新型的保护范围,凡根据本实用新型精神实质所做的等效变化或修饰,都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。