1.本发明涉及目标检测技术领域,特别涉及一种基于点云空间分布映射的激光雷达数据的学习方法。
背景技术:
2.随着机器人事业的不断发展,关于复杂环境下的三维感知需求也在持续扩大,从基本的扫地机器人、agv车等简单结构化环境下的感知与检测,三维感知范围的广度和检测内容的深度都在不断迭代进步,传统的单线激光雷达已经无法满足当前的日益复杂的三维感知技术需求,多线激光雷达扫描三维成像逐渐成为自动驾驶、无人系统、自主巡逻等领域的重要组成部分。
3.以激光雷达传感器数据为代表的深度学习感知方案在移动机器人感知领域已经引起了广泛的研究,高质量而快速的成像结果以及深度学习是移动机器人三维感知技术的关键。其中激光雷达数据集的标注是一项繁琐且费力的工作,由于激光雷达传感器的型号、扫描模式及安装方式不一致,如16线、32线、64线以及非重复扫描的激光雷达,每一个应用场景在实际情况所选择的激光雷达传感器采集的数据集与已标注激光雷达数据集通常是异构的,难以充分利用已标注数据集的信息。由于激光雷达数据集异构存在深度学习应用困难的问题,目前激光雷达的学习方法中,重新标注一份新的数据集将花费大量的人力与时间成本,而采购相同型号的传感器或设备将花费不菲的开销甚至并不符合实际应用场景,部分学者仅停留在公共数据集仿真阶段,目标激光雷达点云数据集与带标注数据集的差异限制了以激光雷达传感器为代表的深度学习感知方案在机器人感知技术领域的进一步发展。
技术实现要素:
4.本发明提供了一种基于点云空间分布映射的激光雷达数据的学习方法,以解决现有激光雷达传感器难以充分利用已标注数据集的信息的技术问题。
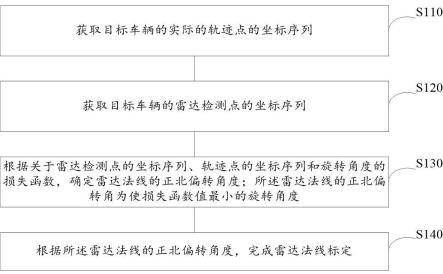
5.为达到上述目的,本发明的技术方案是这样实现的:本发明提供了一种基于点云空间分布映射的激光雷达数据的学习方法,包括如下步骤:步骤s1、选定或采集任意带标注激光雷达点云数据集;搭建采集设备,使用采集设备采集数据,并利用采集的数据构建目标激光雷达点云数据集;对任意带标注激光雷达点云数据集和目标激光雷达点云数据集进行空间共性分析;步骤s2、将任意带标注激光雷达点云数据集所在空间坐标系变换至目标激光雷达点云数据集所在空间坐标系;步骤s3、对坐标系变换后的任意带标注激光雷达点云数据集进行序列化处理;步骤s4、对序列化处理后的任意带标注激光雷达点云数据集中三维空间的非共线三点计算近似的空间平面,并计算与目标激光雷达线束的交点,生成带标注的映射数据集;
步骤s5、利用带标注的映射数据集训练任意深度学习模型,并对目标激光雷达点云数据集生成目标激光雷达点云数据集的目标检测结果;步骤s6、将目标激光雷达点云数据集的目标检测结果传输到训练后的任意深度学习模型内,设计多目标跟踪器并构建专家系统,利用专家系统对多目标跟踪器进行筛选,通过卡尔曼滤波器对多目标跟踪器的序列信息进行更新实现结果的优化,完成不同采集方式的多类型非统一的数据集在同一深度学习框架中的统一化使用。
6.优选的,所述采集设备包括移动车、数据采集传感器模块、工控机与数据传输模块;所述移动车作为数据采集的承载平台;所述移动车的底部设置有底盘;所述数据采集传感器模块包括一个激光雷达传感器和一个惯性测量单元,所述激光雷达传感器安装于所述移动车上部且四周无遮挡,所述惯性测量单元安装于所述激光雷达传感器旁;所述工控机与所述数据传输模块安装在所述底盘的上方,所述工控机与所述数据传输模块通过网线连接。
7.优选的,所述步骤s1具体包含如下步骤:步骤s11、选定或采集任意带标注激光雷达点云数据集;步骤s12、搭建采集设备,使用采集设备采集数据,并利用采集的数据构建目标激光雷达点云数据集;目标激光雷达点云数据集未进行信息标注;步骤s13、观察并分析目标激光雷达点云数据集与任意带标注激光雷达点云数据集在同一公共空间的部分,得到目标激光雷达点云数据集与任意带标注激光雷达点云数据集的空间共性。
8.优选的,所述步骤s2具体包含如下步骤:步骤s21、根据任意带标注激光雷达点云数据集中激光雷达的安装方式、激光雷达传感器的安装参数,对线束空间进行分析,并标定目标激光雷达点云数据集到任意带标注激光雷达点云数据集的坐标变换;线束空间:激光雷达通过激光线束对三维环境进行扫描,扫描的范围构成线束空间;如国外激光雷达公司生产名为velodyne-hdl64型号的激光雷达,其垂直扫描范围为25
°
到-5
°
,在这个垂直平面范围内存在64条激光雷达线束,每个线束在水平面上进行环形扫描,在空间中64条线束进行一圈环形扫描所形成的空间,定义为线束空间;步骤s22、根据坐标变换,在同一公共空间中对目标激光雷达点云数据集的采集方式与任意带标注激光雷达点云数据集的采集方式进行仿真,仿真过程通过在gazebo中设置并定义激光雷达传感器,在ros机器人操作系统中可视化扫描过程,能够直观看出线束空间的情况;仿真的作用是为了计算并获取任意带标注激光雷达点云数据集采集设备和目标激光雷达点云数据集采集设备的感知半径、垂直视场角、有效感知激光束与公共感知区域。
9.优选的,所述空间共性即以三维仿真的形式在同一个三维空间中分别计算并获取任意带标注激光雷达点云数据集采集设备和目标激光雷达点云数据集采集设备的感知半径、垂直视场角、有效感知激光束与公共感知区域,通过设置三维空间中有效感知范围的三个维度阈值,移除无效感知区域的稀疏点云数据。
10.优选的,所述步骤s3具体包含如下步骤:
步骤s31、在时间序列上对目标激光雷达点云数据集构建匀速运动模型,利用匀速运动模型补偿点云数据的漂移,该漂移来源于激光雷达点云机械旋转与匀速运动相互作用;步骤s32、利用分段欧式聚类算法和体素化实现目标激光雷达点云的聚类与融合,对线束与水平方向角度进行编号,将目标激光雷达点云数据集中各个雷达点以二维访问的形式有序化保存,即对于每一个点均可通过如点数对(m, n)的形式访问,其中m表示垂直序列号,由垂直分辨率计算得出,n表示水平序列号,由水平分辨率计算得出。
11.优选的,所述步骤s4中的对任意带标注激光雷达点云数据集中三维空间的非共线三点计算近似的空间平面,并计算与目标激光雷达线束的交点,具体包含如下步骤:步骤s41、根据空间共性分析得到的参数,计算包括任意带标注激光雷达点云数据集采集方式到目标激光雷达点云数据集采集方式的坐标变换、垂直俯仰角和有效感知范围,确定目标激光雷达点云数据集的映射空间范围和目标激光雷达点云数据集的阈值;步骤s42、对于任意带标注激光雷达点云数据集中三维空间的一个点p,根据目标激光雷达点云数据集的映射空间范围和目标激光雷达点云数据集的阈值,从同一线束选取一个邻近点,并再从非同一线束选取一个邻近点,以确保该三点非共线;步骤s43、根据步骤s41中的坐标变换,将步骤s42中的点p通过坐标变换至目标激光雷达点云数据集的坐标系,根据步骤s42中的有序化计算其垂直序列号与水平序列号,通过四舍五入取整,此时由垂直序列号与水平序列号将唯一确定一条线束,但此时空间深度未知;步骤s44、根据s42中选取的非共线三点,首先将该非共线三点通过s41中的坐标变换至目标激光雷达点云数据集坐标系,再通过线性方程计算三点所在平面;步骤s45、根据步骤s43所确定的唯一线束和步骤s44所确定的唯一平面,计算线束与平面的交点,其交点即为任意带标注激光雷达点云数据集中三维空间的一个点p至目标激光雷达点云数据集三维空间的映射点;步骤s46、对任意带标注激光雷达点云数据集所有点进行上述映射,将映射后的数据集称为映射数据集,并作为深度学习中的训练数据集。
12.优选的,所述步骤s5中的设计多目标跟踪器具体为多目标数据,其建立过程具体如下:构建多目标跟踪器的类,以设计的数据结构记录以信息序列号、时间戳、跟踪标志、速度、位姿和位置信息为主的多目标数据。
13.优选的,所述步骤s5具体包含如下步骤:步骤s51、利用带标注的映射数据集训练任意深度学习模型;步骤s52、在三维空间中对带标注的映射数据集进行多个尺度的放缩,在每个尺度中构建八叉树用以邻域的访问;步骤s53、利用邻域内点坐标信息计算多尺度邻域的几何特征向量,根据特征向量在带标注的映射数据集三维空间中均匀划分的子空间实现关键点采样;实现均匀的关键点采样,在保留充足信息的情况下减少神经网络的计算量,并减少映射过程带来的噪声和离群点的影响;步骤s54、通过带标注的映射数据集训练任意深度学习模型,利用该模型对目标激
光雷达点云数据集进行目标检测,生成目标激光雷达点云数据集的目标检测结果。
14.优选的,所述步骤s6中的专家系统的建立过程具体包含如下步骤:步骤s61、对目标激光雷达点云数据集的目标检测结果进行统计学分析;步骤s62、将每一条轨迹中每一子段内的数据信息通过匈牙利算法关联,并与检测结果及数据信息相对应,构建用于多目标跟踪器保留与丢弃判断的专家系统。
15.本发明的有益效果:本发明通过分析任意带标注激光雷达点云数据集与目标激光雷达点云数据集的共性,针对基于激光雷达传感器的深度学习感知技术,通过点拟合层面的映射对任意带标注激光雷达点云数据集进行映射以近似目标激光雷达点云数据集,从而解决深度学习步骤中训练数据集无标注、少样本的问题。同时设计点云空间感知阈值从多尺度多结构层面保留激光雷达点云信息且减少网络的计算量,根据网络的输出信息定义数据结构用以设计多目标跟踪器,利用构建的专家系统对多目标跟踪器进行有效性的筛选以减少在感知过程中不必要的计算,经过卡尔曼滤波器对多目标跟踪器的序列信息进行更新,实现结果的优化来减少不同类型数据集差异带来的影响,该方法易操作、效率高,具有良好的鲁棒性。
附图说明
16.图1是本发明的流程示意图;图2是本发明的数据集空间共性分析图;图3是本发明的激光雷达点云数据有序化示意图;图4是本发明任意带标注激光雷达点云数据集中三维空间的非共线三点近似空间平面计算;图5是本发明在具体应用实例中激光雷达数据输入神经网络后检测结果的可视化点云图;图6是任意带标注激光雷达点云数据示意图;图7是任意带标注激光雷达点云数据映射结果示意图;图8是本发明在深度学习模型检测后目标跟踪与信息更新的原理示意图。
具体实施方式
17.下面结合附图及具体实施例对本发明再作进一步详细的说明。
18.在本发明中的“第一”、“第二”等描述,仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量或顺序。由此,限定有“第一”、“第二”的特征可以明示或隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个、三个等,除非另有明确具体的限定。
19.第一实施例:参照图1,本技术实施例提供了一种基于点云空间分布映射的激光雷达数据的学习方法,包括如下步骤:步骤s1、选定或采集任意带标注激光雷达点云数据集;搭建采集设备,使用采集设备采集数据,并利用采集的数据构建目标激光雷达点云数据集;在本实施例中,所述步骤s1具体包含如下步骤:
步骤s11、选定或采集任意带标注激光雷达点云数据集;具体的,在本实施例中,任意带标注激光雷达点云数据集可以是曾经标注过的某个点云数据集,可以是多个不同传感器仅标注一类传感器的点云数据集,也可以是网上公开的某个点云数据集。
20.任意带标注激光雷达点云数据集可以是开源的,也可以是曾经标注过的,也可以是目前标注过的,如何来的有很多方式,目标激光雷达点云数据集是没有标注的,依靠本发明的方式,可以无需再额外对目标激光雷达点云数据集进行标注,依然能通过学习方法完成检测;步骤s12、搭建采集设备,使用采集设备采集数据,并利用采集的数据构建目标激光雷达点云数据集;目标激光雷达点云数据集未进行信息标注;步骤s13、观察并分析目标激光雷达点云数据集与任意带标注激光雷达点云数据集在同一公共三维空间内的相同部分,得到目标激光雷达点云数据集与任意带标注激光雷达点云数据集的空间共性。
21.步骤s2、将任意带标注激光雷达点云数据集所在空间坐标系变换至目标激光雷达点云数据集所在空间坐标系;在本实施例中,所述步骤s2具体包含如下步骤:步骤s21、根据任意带标注激光雷达点云数据集中激光雷达的安装方式、激光雷达传感器的安装参数,对线束空间进行分析,并标定目标激光雷达点云数据集到任意带标注激光雷达点云数据集的坐标变换;利用levenberg-marquardt非线性优化算法完成计算过程的迭代;线束空间:激光雷达通过激光线束对三维环境进行扫描,扫描的范围构成线束空间;如国外激光雷达公司生产名为velodyne-hdl64型号的激光雷达,其垂直扫描范围为25
°
到-5
°
,在这个垂直平面范围内存在64条激光雷达线束,每个线束在水平面上进行环形扫描,在空间中64条线束进行一圈环形扫描所形成的空间,定义为线束空间;步骤s22、根据坐标变换,在同一公共空间中对目标激光雷达点云数据集的采集方式与任意带标注激光雷达点云数据集的采集方式进行仿真,仿真过程通过在gazebo中设置并定义激光雷达传感器,在ros机器人操作系统中可视化扫描过程,能够直观看出线束空间的情况;仿真的作用是为了计算并获取任意带标注激光雷达点云数据集采集设备和目标激光雷达点云数据集采集设备的感知半径、垂直视场角、有效感知激光束与公共感知区域;在本实施例中,所述空间共性即以三维仿真的形式在同一个公共三维空间中分别计算并获取任意带标注激光雷达点云数据集采集设备和目标激光雷达点云数据集采集设备的感知半径、垂直视场角、有效感知激光束与公共感知区域,通过设置三维空间中有效感知范围的三个维度阈值,移除无效感知区域的稀疏点云数据,从而得到目标激光雷达点云数据集与任意带标注激光雷达点云数据集的空间共性。
22.步骤s3、对坐标系变换后的任意带标注激光雷达点云数据集进行序列化处理;在本实施例中,所述步骤s3具体包含如下步骤:步骤s31、在时间序列上对目标激光雷达点云数据集构建匀速运动模型,利用匀速运动模型补偿点云数据的漂移,该漂移来源于激光雷达点云机械旋转与匀速运动相互作用;
步骤s32、利用分段欧式聚类算法和体素化实现目标激光雷达点云的聚类与融合,对线束与水平方向角度进行编号,将目标激光雷达点云数据集中各个雷达点以二维访问的形式有序化保存,即对于每一个点均可通过如点数对(m, n)的形式访问,其中m表示垂直序列号,由垂直分辨率计算得出,n表示水平序列号,由水平分辨率计算得出;步骤s4、对序列化处理后的任意带标注激光雷达点云数据集中三维空间的非共线三点计算近似的空间平面,并计算与目标激光雷达线束的交点,生成带标注的映射数据集;在本实施例中,所述步骤s4具体包含如下步骤:步骤s41、根据空间共性分析得到的参数,计算包括任意带标注激光雷达点云数据集采集方式到目标激光雷达点云数据集采集方式的坐标变换、垂直俯仰角和有效感知范围,确定目标激光雷达点云数据集的映射空间范围和目标激光雷达点云数据集的阈值;确定空间范围是因为并非环境中所有的点云均关注,我们只关注周围有限的环境。确定阈值是因为映射完毕后,映射的数据可能存在某一目标下的点云非常少,此时需要排除,举例,车辆目标的边界框内至少存在大于等于5个点数量的点云,才认为这是一个车辆目标;步骤s42、对于任意带标注激光雷达点云数据集中三维空间的一个点p,根据目标激光雷达点云数据集的映射空间范围和目标激光雷达点云数据集的阈值,从同一线束选取一个邻近点,并再从非同一线束选取一个邻近点,以确保该三点非共线;步骤s43、根据步骤s41中的坐标变换,将步骤s42中的点p通过坐标变换至目标激光雷达点云数据集的坐标系,根据步骤s32中的有序化计算其垂直序列号与水平序列号,通过四舍五入取整,此时由垂直序列号与水平序列号将唯一确定一条线束,但此时空间深度未知;步骤s44、根据s42中选取的非共线三点,首先将该非共线三点通过s41中的坐标变换至目标激光雷达点云数据集坐标系,再通过线性方程计算三点所在平面;步骤s45、根据步骤s43所确定的唯一线束和步骤s44所确定的唯一平面,计算线束与平面的交点,其交点即为任意带标注激光雷达点云数据集中三维空间的一个点p至目标激光雷达点云数据集三维空间的映射点;步骤s46、对任意带标注激光雷达点云数据集所有点进行上述映射,将映射后的数据集称为映射数据集,并作为深度学习中的训练数据集。
23.步骤s5、利用带标注的映射数据集训练关于点云目标检测的任意深度学习模型,并对目标激光雷达点云数据集生成检测结果;在本实施例中,所述步骤s5中的采用多尺度多结构的邻域特征对深度学习中的训练数据集进行关键点采样具体包含如下步骤:步骤s51、此时带标注的映射数据集与目标激光雷达点云数据集在点云空间中同分布,且带标注的映射数据集由任意带标注激光雷达点云数据集生成,因此映射后的数据集同样附带标注,利用映射数据集训练任意深度学习模型;步骤s52、在三维空间中对映射数据集进行多个尺度的放缩,在每个尺度中构建八叉树用以邻域的访问;步骤s53、利用邻域内点坐标信息计算多尺度邻域的几何特征向量,根据特征向量在带标注的映射数据集三维空间中均匀划分的子空间实现关键点采样;实现均匀的关键点
采样,在保留充足信息的情况下减少神经网络的计算量,并减少映射过程带来的噪声和离群点的影响。
24.步骤s54、通过映射数据集训练任意深度学习模型,利用该模型对目标激光雷达点云数据集进行目标检测,目标激光雷达点云数据集的目标检测结果,此时可以通过少量标注目标激光雷达点云来量化映射效果;步骤s6、将目标激光雷达点云数据集的目标检测结果传输到训练后的任意深度学习模型内,设计多目标跟踪器,根据应用场景及经验人为构建多目标跟踪器剪枝方案的专家系统,利用专家系统对多目标跟踪器进行筛选,通过卡尔曼滤波器对多目标跟踪器的序列信息进行更新实现结果的优化,完成不同采集方式的多类型非统一的数据集在同一深度学习框架中的统一化使用。
25.在本实施例中,所述步骤s5中的设计多目标跟踪器具体为多目标数据,其建立过程具体如下:构建多目标跟踪器的类,以设计的数据结构记录以信息序列号、时间戳、跟踪标志、速度、位姿和位置信息为主的多目标数据。
26.在本实施例中,所述步骤s6中的专家系统的建立具体包含如下步骤:步骤s61、对目标激光雷达点云数据集的目标检测结果进行统计学分析;步骤s62、将每一条轨迹中每一子段内的数据信息通过匈牙利算法关联,并与目标激光雷达点云数据的检测结果及数据信息相对应,构建用于多目标跟踪器保留与丢弃判断的专家系统。
27.由上可知,本发明是面向激光雷达深度学习的数据集映射与统一化技术,其原理是通过数据集的共性分析映射任意带标注激光雷达点云数据集以近似目标激光雷达点云数据集作为神经网络的训练数据,以此达到目标激光雷达点云数据集检测的目的,并通过数据关联的跟踪与预测来感知信息以优化数据集差异带来的影响。当缺乏大规模带标注训练数据集或难以复现任意带标注激光雷达点云数据集的采集设备时,本发明依据上述原理在无需自身标注的情况下实现激光雷达深度学习的感知技术。
28.如图2所示,激光雷达包括32线激光雷达和64线激光雷达,其中、分别表示64线激光雷达的第m条、第m-1条线束;、分别表示32线激光雷达的第i条、第i-1条线束;表示目标上被线束扫描到的一点,64线激光雷达的64条所有线束和32线激光雷达32条线束构建了线束空间,在具体应用实例中,任意带标注激光雷达点云数据集中激光雷达传感器扫描形式1与目标激光雷达点云数据集中激光雷达传感器扫描形式2在同一个公共三维空间中进行仿真,并分析三维公共空间的共性。
29.在具体应用实例中,图3是本发明的激光雷达点云数据有序化示意图,其中、、分别表示64线激光雷达的第m 1条、第m条、第m-1条线束;、、分别表示激光雷达水平方向360范围环绕扫描后第、、个扫描结果;表示该点由第m条线束的第n个扫描结果,点对二维访问形式的有序化保存结果,即对于每一个点均可通过如点数对的形式访问,其中m表示垂直序列号,由
垂直分辨率计算得出,n表示水平序列号,由水平分辨率计算得出;图4是本发明任意带标注激光雷达点云数据集中三维空间的非共线三点近似空间平面计算,其中、分别表示64线激光雷达的第m条、第m-1条线束;、分别表示32线激光雷达的第i条、第i-1条线束;表示该点由第m条线束的第n个扫描结果;表示该点由第m-1条线束的第n个扫描结果;表示该点由第m-1条线束的第n-1个扫描结果;通过、、三点为非共线三点;通过点拟合层面的映射处理,将任意带标注激光雷达点云数据集的点云映射至目标激光雷达点云数据集点云的扫描线束序号及空间坐标,实现任意带标注激光雷达点云数据集的映射并近似目标激光雷达点云数据集,以此获得深度学习感知所需要的训练数据集。
30.如图5所示,在具体应用实例中,通过由任意带标注激光雷达点云数据集得到的、近似目标激光雷达点云数据集的训练数据输入神经网络模型进行训练后,得到模型对目标激光雷达点云数据集进行检测的点云可视化结果。
31.如图6和图7所示,在具体应用实例中,任意带标注激光雷达点云数据集在传感器型号、采集方式上与存在差异,通过映射后,获取目标激光雷达点云数据的近似数据集。如:任意带标注激光雷达点云数据集为64线激光雷达而目标激光雷达点云数据集为32线激光雷达。
32.参见图8,其为目标跟踪与信息更新原理的示意图,其中、、分别表示激光雷达点云的第、第、第帧激光雷达点云数据,、、分别表示第帧激光雷达点云数据中检测出的第1个、第2个、第3个目标,且目标均首次出现在第帧激光雷达点云数据中,在第帧激光雷达点云数据中依然能够跟踪到、、三个目标,以带标注的映射数据集训练通过神经网络训练模型,该模型对目标激光雷达点云数据集进行检测给出每一帧的多个目标并输入至多目标跟踪器,通过匈牙利算法实现多对多的相邻帧数据关联,最后由专家系统根据关联轨迹与更新标志的对应关系将多目标跟踪器进行筛选。
33.所述的专家系统,包含关联轨迹与更新标志,关联轨迹为关于多目标跟踪器的信息序列,如,由目标在时间轴上的位置信息所构成的位置序列或由方向等信息所构成的方向序列,对于多目标跟踪器中正确的序列,在专家系统中将对应于保留或预测的更新标志,对于错误的序列,在专家系统中将对应丢弃的更新标志。
34.在具体应用实例中,由神经网络检测的目标通过多目标关联器输出多个单目标信息序列,根据信息序列推断检测目标的速度、方向与位置等信息,实现激光雷达点云深度学习对环境目标的感知。
35.在无需自身标注数据集或复现任意带标注激光雷达点云数据集采集方式的情况下,通过共性分析、数据映射、神经网络、多目标跟踪与专家系统判断的步骤,实现面向激光雷达点云深度学习的数据集映射,完成不同采集方式的多类型非统一的数据集在同一深度学习框架中的统一化使用。
36.第二实施例:在本实施例中,所述采集设备包括移动车、数据采集传感器模块、工控机与数据传
输模块;所述移动车作为数据采集的承载平台;所述移动车的底部设置有底盘;所述数据采集传感器模块包括一个激光雷达传感器和一个惯性测量单元,所述激光雷达传感器安装于所述移动车上部且四周无遮挡,所述惯性测量单元安装于所述激光雷达传感器旁;所述工控机与所述数据传输模块安装在所述底盘的上方,所述工控机与所述数据传输模块通过网线连接。
37.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。并且,本发明各个实施方式之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。