技术特征:
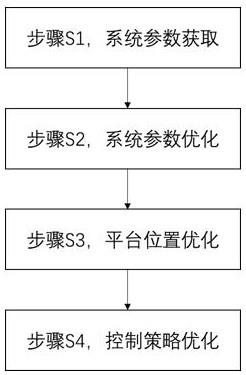
1.一种索驱机器人的侧立面工作范围优化方法,其特征在于,所述索驱机器人的侧立面工作范围优化方法具体包括:步骤s1,系统参数获取:建立索驱机器人运动学模型,获取索驱机器人系统参数,系统参数包括固定绳索的静平台信息、动平台信息和绳索信息;步骤s2,系统参数优化:根据索驱机器人运动学模型,优化索驱机器人系统参数,获得第一工作范围;步骤s3,平台位置优化:根据索驱机器人运动学模型优化静平台位置和/或动平台出索点的位置,优化第一工作范围的顶部区域,获得第二工作范围;步骤s4,控制策略优化:根据第二工作范围和索驱机器人运动学模型,确定绳索拉力控制策略,求解最优绳索拉力,优化第二工作范围的两侧工作范围,确定第三工作范围。2.根据权利要求1所述的索驱机器人的侧立面工作范围优化方法,其特征在于,静平台信息包括静平台的水平和竖直距离,动平台信息包括动平台的出索点的水平、竖直距离和动平台重量,绳索信息包括绳索的索力极限范围。3. 根据权利要求1所述的索驱机器人的侧立面工作范围优化方法,其特征在于,根据索驱机器人的受力平衡建立索驱机器人运动学模型,,其中,,,,j为向量矩阵,t为索力矩阵,w为受力矩阵,g为重力,f为外界的干扰力,m表示合力矩,是绳索的单位方向向量,是力臂的向量,表示索力,。4.根据权利要求1所述的索驱机器人的侧立面工作范围优化方法,其特征在于,优化索驱机器人系统参数具体包括:选定基础系统参数,根据索驱机器人运动学模型和基础系统参数求解基础工作范围,计算基础工作范围的覆盖率;根据覆盖率选择系统参数的优化模式,覆盖率为实际可达的工作范围与静平台出索点围成的区域面积比值;根据选择的优化模式优化索驱机器人系统参数,获得第一工作范围。5.根据权利要求4所述的索驱机器人的侧立面工作范围优化方法,其特征在于,优化模型包括串行优化模式和并行优化模式,串行优化模式是指根据基础工作范围的覆盖率去除无需优化的系统参数,按优化求解计算量从大到小排列所有剩余的待优化的系统参数,依序逐个求解所有剩余的待优化的系统参数中单个系统参数的最优参数值;并行优化模式是指固定所有系统参数,根据待优化的系统参数对覆盖率的影响同时调整待优化的系统参数,获得最优参数值。6.根据权利要求1所述的索驱机器人的侧立面工作范围优化方法,其特征在于,所述步骤s3具体包括:计算第一工作范围顶部区域的不可达区域的面积,根据第一工作范围顶部区域的不可
达区域的面积选择平台位置优化方式,根据选定的平台位置优化方式优化第一工作范围的顶部区域,以获得第二工作范围,第二工作范围顶部区域不可达区域面积小于第一工作范围的顶部区域。7.根据权利要求6所述的索驱机器人的侧立面工作范围优化方法,其特征在于,所述平台位置优化方式包括静平台位置优化、动平台出索点位置优化和静平台位置、动平台出索点位置同步优化;静平台位置优化方式具体包括:根据静平台在工作空间中的位置将固定锚点的位置分成n干份,每份区域设有重合面积s,切换固定锚点的位置以改变静平台位置,根据索驱机器人运动学模型和静平台位置求解不同静平台位置下的工作范围,以获得最优工作范围;动平台出索点的位置优化方式具体包括:根据索驱机器人运动学模型和动平台出索点的位置求解不同动平台出索点位置下的工作范围,以获得最优工作范围。8.根据权利要求1所述的索驱机器人的侧立面工作范围优化方法,其特征在于,所述步骤s4具体包括:根据优化后的系统参数、静平台和动平台出索点的位置,确定第二工作范围中索驱机器人不可到达的第一侧边区域和第二侧边区域,第一侧边区域和第二侧边区域分别位于第二工作范围的两侧;判断索驱机器人动平台出索点的位置是否在第一侧边区域和第二侧边区域的边界,若是,降低最小索力的约束,根据索驱机器人运动学模型优化求解最优索力,根据最优索力调整绳索拉力控制策略。9.根据权利要求8所述的索驱机器人的侧立面工作范围优化方法,其特征在于,求解最优绳索拉力具体包括:利用二范数优化目标求解最优绳索拉力,目标函数为,约束条件为,其中,j为向量矩阵,t为索力矩阵,w为受力矩阵,表示索力,,表示绳索索力下限,表示绳索索力上限。10.一种索驱机器人的侧立面工作范围优化装置,其特征在于,所述索驱机器人的侧立面工作范围优化装置包括:参数获取模块,用于建立索驱机器人运动学模型,获取索驱机器人系统参数,系统参数包括固定绳索的静平台信息、动平台信息和绳索信息;参数优化模块,用于根据索驱机器人运动学模型,优化索驱机器人系统参数,获得第一工作范围;平台优化模块,用于根据索驱机器人运动学模型优化静平台位置和/或动平台出索点的位置,优化第一工作范围的顶部区域,获得第二工作范围;控制策略优化模块,用于根据第二工作范围和索驱机器人运动学模型,确定绳索拉力控制策略,求解最优绳索拉力,优化第二工作范围的两侧工作范围,确定第三工作范围。
技术总结
本发明涉及一种索驱机器人的侧立面工作范围优化方法和装置,包括建立索驱机器人运动学模型,获取索驱机器人系统参数;根据索驱机器人运动学模型,优化索驱机器人系统参数,获得第一工作范围;根据索驱机器人运动学模型优化静平台位置和/或动平台出索点的位置,优化第一工作范围的顶部区域,获得第二工作范围;根据第二工作范围和索驱机器人运动学模型,确定绳索拉力控制策略,求解最优绳索拉力,优化第二工作范围的两侧工作范围,确定第三工作范围。各个优化步骤分别从顶部和两侧各个方向扩宽工作范围,提高索驱机器人高空作业能力,降低了系统的复杂性,提供了系统的适用性。提供了系统的适用性。提供了系统的适用性。
技术研发人员:许华旸 李海圣 吴迪 赵德奎 张川 刘彦雨 蒲婷 杨世军
受保护的技术使用者:北京史河科技有限公司
技术研发日:2022.11.30
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。