1.本发明涉及一种定向测量装置,特别是涉及一种基于浮力的定向测量装置、一种基于浮力的定向测量方法。
背景技术:
2.两种不相容的液态纯净物(如水与油、苯类、液态烃等)在相互混合后,短时间难以直接分离出来。以油水混合液体为例,由于水和油的密度、沸点均不相同,可以采用离心法、沉降法、蒸馏法、膜分离法、气浮法等进行油水分离。其中,采用沉降法进行油水分离广泛应用在含油污水的处理中。
3.由两种密度不同且互不相溶的液态纯净物形成的混合液体,可以通过静置分层(沉降法)实现两种液态纯净物的分离。在此过程中,混合液体先分为自上而下的低密度液态纯净物层、混合层以及高密度液态纯净物层,最后完全分离形成上下两层液态纯净物层。其中,低密度液态纯净物层的深度和高密度液态纯净物层的深度难以实时监测。在非透明的容器中,仅能通过人工测量获取低密度液态纯净物层的深度,进而通过吸取或排放达到两种液态纯净物分离的目的。然而,人工测量不具备实时性,且测量精度低,难以实现两种液态纯净物的精确分离。
技术实现要素:
4.基于此,有必要针对现有的两种密度不同且互不相溶的液态纯净物的混合物在静置分层的过程中,单层的液态纯净物深度难以实时精确测量的问题,提供一种基于浮力的定向测量装置及其定向测量方法。
5.本发明通过以下技术方案实现:一种基于浮力的定向测量装置包括:第一球体、第二球体、距离传感器、通信装置、内壳和透明外盖。第一球体为空心球体,且第一球体的密度小于待测量液体中密度最小的液态纯净物的密度。第二球体为实心球体,且第二球体的密度大于待测量液体中密度最大的液态纯净物的密度。第一球体与第二球体可拆卸式连接,以使第一球体与第二球体的整体重心位于第二球体内,且该重心位于第一球体的球心和第二球体的球心所在的直线上。距离传感器安装在第一球体内或第二球体内,距离传感器的探测端背向第一球体的球心与第二球体的球心。距离传感器用于实时探测其自身与待检测的混合液体的液面或底面的间距。定向测量装置的整体密度ρe满足条件:其中,μ为在混合液体中待测量液体分层后另一液体的最大百分比,ρm为待测量液体的密度,ρa为混合液体中另一液体的密度。
6.上述定向测量装置放置在由两种密度不同且互不相溶的液态纯净物形成的混合液体中时,在重力作用下,混合液体根据液态纯净物的密度自然分层,其中密度较大的液态纯净物处于最下层,密度较小的液态纯净物处于最上层,两种液态纯净物的混合层处于中
间层。当测量密度较小的液态纯净物时,选择整体密度接近最上层纯净物密度的定向测量装置,并使距离传感器竖直向上,进而根据距离传感器测量其自身与液面的间距得到最上层液态纯净物的深度。当测量密度较大的液态纯净物时,选择整体密度接近最下层纯净物密度的定向测量装置,并使距离传感器竖直向下,进而根据距离传感器测量其自身与液面的间距得到最下层液态纯净物的深度。上述定向测量装置可以在混合液体分层过程中,实时测量相应的液态纯净物的深度,具有实时性强、测量精度高的特点,解决现有混合液体中分层液体深度难以实时测量的问题。
7.在其中一个实施例中,通信装置安装在第一球体或第二球体内。通信装置与距离传感器连通,用于传输距离传感器探测的距离信号,以便于对距离传感器实时采集的间距数据进行记录。
8.在其中一个实施例中,第一球体或第二球体内开设有用于安装内壳的空腔。内壳为空心长方体或空心圆柱体。且内壳以第一球体的球心和第二球体的球心所在的直线为中轴呈中心对称。内壳的一端延伸至第一球体或第二球体的外侧。内壳用于收容距离传感器。透明外盖与内壳可拆卸式连接并形成密封结构,以使定向测量装置在待测量液体中保持体积和质量不变。透明外盖设置在距离传感器的探测方向上。
9.在其中一个实施例中,第二球体为实心球体或具有填充物的空心球体。当第二球体为空心球体时,第二球体包括外壳、挡板和填充物。挡板与外壳可拆卸式连接,挡板与外壳共同围成一个密闭的填充腔。填充物设置在填充腔内。填充物为液体、颗粒状固体或粉末状固体,且填充物的密度大于待测量的混合液体中任意一种液态纯净物的密度。
10.在其中一个实施例中,挡板包括底板和手柄。底板上开设有用于填充填充物的通孔,手柄固定连接在通孔上并与底板密封。手柄固定连接在底板的顶面上。底板与第二球体的内壁可拆卸式连接。
11.在其中一个实施例中,底板通过调节装置实现与第二球体的可拆卸式连接。底板上开设有用于收容调节装置的内槽。调节装置包括限位块、连接杆、弹簧和拨杆。第二球体的内壁上设置有多个用于卡接限位块的凹槽一。连接杆的一端与限位块固定连接。连接杆的另一端与拨杆固定连接构成l形杆。弹簧设置在连接杆外侧,弹簧的一端与底板的内壁抵接,另一端与限位块抵接。
12.在其中一个实施例中,凹槽一为圆台形槽。且凹槽一靠近底板的一侧的内径大于凹槽一的另一侧的内径。
13.在其中一个实施例中,第一球体的外壁上设置有用于收容密封圈的凹槽二。凹槽二位于第一球体与第二球体的连接处。当第一球体与第二球体连接时,密封圈收缩在凹槽二内以实现第一球体与第二球体的密封。
14.本发明还提供一种基于浮力的定向测量方法,定向测量方法包括如下过程:s1:获取液态纯净物a的密度ρa以及液态纯净物b的密度ρb,根据待测量的液态纯净物计算定向测量装置的整体密度ρe。整体密度ρe满足条件:其中,μ为在混合液体分层后的待测量层中相应的液态纯净物的最低含量,ρm为待测量的液态纯净物的密度,ρa为混合液体中另一液态纯净物的密度。
15.s2:判断待测量的液态纯净物的密度是否大于另一液态纯净物的密度。是则配置一个整体密度为ρe且距离传感器安装在第二球体内的定向测量装置。否则配置一个整体密度为ρe且距离传感器安装在第一球体内的定向测量装置,并在混合液体的液面上放置一个浮层。
16.s3:将待测量的定向测量装置放置在待测量的混合液体中。在重力作用下,定向测量装置的距离传感器竖直向上或竖直向下。读取距离传感器实时测量其自身与待测量的混合液体的液面或底面的间距d。根据定向测量装置的中心与距离传感器的探测端的间距s计算待测量的液态纯净物层的深度h。则深度h表达为:h=d s。
17.在其中一个实施例中,当第二球体采用实心球体时,配置定向测量装置的方法如下:s211:选择一个密度大于任一液态纯净物的第二球体。获取第二球体的质量m2及体积v2。
18.s212:获取待安装的距离传感器及通信装置的总重量me,进而计算出第一球体的质量和体积范围,以使配置成的定向测量装置的整体密度为ρe。则第一球体的质量m1与体积v1满足条件:。
19.当第二球体采用空心球体时,配置定向测量装置的方法如下:s221:获取定向测量装置在未填充任意填充物时的体积v0和质量m0,根据填充物的密度ρf计算填充物的重量mf。向定向测量装置中添加重量为mf的填充物。填充物的重量满足条件:。
20.相较于现有技术,本发明具有如下有益效果:1.本发明的定向测量装置放置在由两种密度不同且互不相溶的液态纯净物形成的混合液体中时,在重力作用下,混合液体根据液态纯净物的密度自然分层,其中密度较大的液态纯净物处于最下层,密度较小的液态纯净物处于最上层,两种液态纯净物的混合层处于中间层。当测量密度较小的液态纯净物时,选择整体密度接近最上层纯净物密度的定向测量装置,并使距离传感器竖直向上,进而根据距离传感器测量其自身与液面的间距得到最上层液态纯净物的深度。当测量密度较大的液态纯净物时,选择整体密度接近最下层纯净物密度的定向测量装置,并使距离传感器竖直向下,进而根据距离传感器测量其自身与液面的间距得到最下层液态纯净物的深度。上述定向测量装置可以在混合液体分层过程中,实时测量相应的液态纯净物的深度,具有实时性强、测量精度高的特点,解决现有混合液体中分层液体深度难以实时测量的问题。
21.2.本发明的油水分离方法,可以根据油水分离的状态进行实时或间歇式的油水分离,同时动态补偿含油污水,以使在不影响原有污水静置分层的前提下,实现含油污水的分离与进水,进而提高油水分离的效率。同时,本实施例的油水分离方法可以对污水进行实时处理,解决现有的静置分层方法处理含油污水的局限性,提高油水分离的效率。
附图说明
22.图1为本发明实施例1的基于浮力的定向测量装置的立体结构示意图;图2为图1中基于浮力的定向测量装置的立体剖面结构示意图;图3为图1的定向测量装置的第二球体采用空心球体的剖面结构图;图4为图3的定向测量装置的另一结构示意图;图5为图3中第二球体的结构放大图;图6为本发明实施例2的基于浮力的定向测量方法的步骤图;图7为本发明实施例3的采用图1中基于浮力的定向测量装置的油水分离方法的步骤图;图8为本发明实施例4的基于定向测量装置的油水分离装置的剖面结构示意图;图9为图8中第一定向测量装置的剖面结构示意图;图10为图8中第二定向测量装置的剖面结构示意图。
23.主要元件符号说明图中标号为:1、第一球体;2、第二球体;21、外壳;22、挡板;23、填充物;3、距离传感器;4、通信装置;5、内壳;6、透明外盖;7、密封圈;8、调节装置;81、限位块;82、连接杆;83、弹簧;84、拨杆;10、外箱;20、距离传感器三;30、第一定向测量装置;301、球体一;302、球体二;303、距离传感器一;304、通信装置一;40、第二定向测量装置;401、球体三;402、球体四;403、距离传感器二;404、通信装置二;50、排水装置;501、排水管;502、电子阀门;60、吸油装置;601、驱动组件;602、吸油管;603、油泵;604、油箱;70、加热器。
24.以上主要元件符号说明结合附图及具体实施方式对本发明作进一步详细的说明。
25.具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.需要说明的是,当组件被称为“安装于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。当一个组件被认为是“固定于”另一个组件,它可以是直接固定在另一个组件上或者可能同时存在居中组件。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“或/及”包括一个或多个相关的所列项目的任意的和所有的组合。
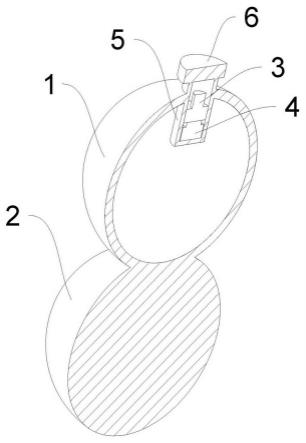
29.实施例1请参阅图1和图2,图1为本实施例的基于浮力的定向测量装置的立体结构示意图;图2为图1中基于浮力的定向测量装置的立体剖面结构示意图。基于浮力的定向测量装置包括:第一球体1、第二球体2、距离传感器3、通信装置4、内壳5和透明外盖6。
30.定向测量装置用于在由两种密度不同且互不相融的液态纯净物混合而成的混合液体静置分层时,实时测量其中一种液态纯净物层的深度。
31.第一球体1为空心球体,且第一球体1的密度小于待测量液体中密度最小的液态纯净物的密度。第二球体2为实心球体,且第二球体2的密度大于待测量液体中密度最大的液态纯净物的密度。第一球体1与第二球体2可拆卸式连接,以使第一球体1与第二球体2的整体重心位于第二球体2内,且该重心位于第一球体1的球心和第二球体2的球心所在的直线上。第一球体1与第二球体2共同构成葫芦形结构。第二球体2的体积不小于第一球体1的体积,以使当第一球体1与第二球体2构成的葫芦形结构位于待探测的液体中时,第二球体2始终位于第一球体1的正下方。定向测量装置的整体密度ρe表达为:其中,μ为在混合液体分层后的待测量层中相应的液态纯净物的最低含量,ρm为待测量的液态纯净物的密度,ρa为混合液体中另一液态纯净物的密度。
32.请结合图3、图4和图5,图3为图1的定向测量装置的第二球体采用空心球体的剖面结构图;图4为图3的定向测量装置的另一结构示意图;图5为图3中第二球体的结构放大图。第一球体1可以为空心球体,也可以为材料密度小于阈值一的实心球体。第二球体2可以为实心球体,也可以为带有填充物的空心球体。当第二球体2采用具有填充物的空心球体时,第二球体2包括外壳21、挡板22和填充物23。挡板22与外壳21可拆卸式连接,挡板22与外壳21共同围成一个密闭的填充腔。填充物23设置在填充腔内。填充物23为液体、颗粒状固体或粉末状固体,且填充物23的密度大于待测量的混合液体中任意一种液态纯净物的密度。在实际应用中,填充物23可以选用沙土、碎石、金属粉末、金属颗粒、汞等。需要注意的是,挡板22与外壳21之间需要密封,以避免在测量过程中,填充物23泄露导致实际测量精度降低。
33.外壳21为空心的球体,挡板22与外壳21围成的填充腔为圆柱体或长方体,以满足在向填充腔内填充填充物23时,第二球体2的重心始终位于第一球体1的球心与第二球体2的球心所在的直线上。外壳21和挡板22可以采用金属材料、陶瓷材料或塑料材料等,只要满足在测量过程中不产生形变即可。
34.由于第一球体1和第二球体2的体积固定,因此,通过向填充腔内填充定量的填充物23,可以调节第二球体2的整体密度,进而调节定向测量装置的整体密度。设定向测量装置的整体体积为v0,未填充任意填充物23时的整体重量为m0。则达到定向测量装置的理想密度ρe时,填充物23的重量满足条件:。
35.挡板22包括底板和手柄。挡板22上开设有用于填充填充物23的通孔。手柄可拆卸式连接在底板的通孔上并与通孔密封。底板与第二球体2的内壁可拆卸式连接。底板设置在外壳21内,难以直接操作,因此需要通过手柄实现对挡板22的拆装。
36.底板通过调节装置8实现与第二球体2的可拆卸式连接。底板上开设有用于收容调节装置8的内槽。调节装置8包括限位块81、连接杆82、弹簧83和拨杆84。第二球体2的内壁上设置有多个用于卡接限位块81的凹槽一。连接杆82的一端与限位块81固定连接。连接杆82的另一端与拨杆84固定连接构成l形杆。弹簧83设置在连接杆82外侧,弹簧83的一端与底板
的内壁抵接,另一端与限位块81抵接。在无外力作用下,弹簧83的复位弹力驱动限位块81向凹槽一的方向移动,当限位块81刚好与一个凹槽一位置相对时,限位块81卡接在凹槽一内,形成对底板的支撑。在填充槽内填充完填充物23时,将底板移动至将填充物23压实,进而通过将限位块81卡接在同一高度的凹槽一内,实现对底板的支撑,避免定向测量装置移动时,填充物23在填充槽内发生位移,保持定向测量装置的重心始终不变。需要增加或减少填充物23时,可以先推动拨杆84,以驱动限位块81远离凹槽一,进而旋转挡板22以使限位块81远离凹槽一所在的区域,再将手柄从底板上拆除,进而通过底板上的通孔填充或移出填充物23,随后将底板压紧在填充物23上,将手柄安装在底板上形成对填充物23的密封。
37.凹槽一为圆台形槽。且凹槽一靠近底板的一侧的内径大于凹槽一的另一侧的内径。圆台形的设计使得限位块81更容易卡接在凹槽一内,同时,由于凹槽一的内壁具有倾斜的侧壁,通过设置多个高度不一的凹槽一,可以实现限位块81在外壳21内任意调节高度,提高底板对填充物23支撑的稳定性。
38.第一球体1的外壁上设置有用于收容密封圈7的凹槽二。凹槽二位于第一球体1与第二球体2的连接处。当第一球体1与第二球体2连接时,密封圈7收缩在凹槽二内以实现第一球体1与第二球体2的密封。通过安装密封圈7可以提高第一球体1与第二球体2的密封性,避免定向测量装置内深入液体,以使定向测量装置在实际测量中体积和密度均保持不变。
39.第一球体1和第二球体2在探测深度范围内保持无形变,以使第一球体1和第二球体2的整体体积保持不变。第一球体1和第二球体2可以采用金属材料,也可以采用陶瓷材料、塑料材料或复合材料等,只要具备足够的强度及密封性能即可。第一球体1和第二球体2在探测过程中始终保持体积、形状和重量均无变化,且防水性能好,避免因液体渗入、粘附在第一球体1或第二球体2内导致其密度发生变化。
40.第一球体1和第二球体2可以采用螺接、卡接等方式实现可拆卸式连接。需要注意的是,无论采用何种连接方式,均需要保持第一球体1与第二球体2相对密封,以使定向测量装置在液体中体积、重量均不发生变化,也即始终保持整体密度不变。则根据实际测量密度的要求,可以采用规格不同的第一球体1与第二球体2进行组合,以改变定向测量装置的整体密度,使其能够应用在密度不同的液体中。如在第二球体2保持不变的情况下,通过采用质量相同、体积各异的第一球体1进行分别组合,以使定向测量装置的整体密度处于预设的密度范围内。
41.在本实施例中,第一球体1与第二球体2均采用不锈钢材料,且第一球体1为空心球体,第二球体2为实心球体。第二球体2的体积小于第一球体1的体积。第一球体1的整体密度小于0.2g/cm3。第二球体2的整体密度大于2g/cm3。当然,在其他实施例中,第一球体1、第二球体2的密度还可以更大或者更小。
42.距离传感器3安装在第一球体1内或第二球体2内,距离传感器3的探测端背向第一球体1的球心与第二球体2的球心。距离传感器3用于实时探测其自身与待检测的混合液体的液面或底面的间距。在采用不同的距离传感器3时,定向测量装置的整体体积无变化。距离传感器3可以采用红外距离传感器、光学距离传感器或超声波距离传感器等,只要能探测物体间的相对距离即可。当然,在其他实施例中,距离传感器3还可以替换为温度传感器、光照传感器、压力传感器等,用于探测混合液体中不同密度液体对应的物理特性。其中,当采用压力传感器时,压力传感器的探测端需要与待探测液体直接接触。因此,需要先计算压力
传感器的整体体积或探测端体积,进而确定测量装置的整体体积,以使定向测量装置的整体密度处于预设的密度范围内。
43.第一球体1或第二球体2内开设有用于安装内壳5的空腔。内壳5为空心长方体或空心圆柱体。且内壳5以第一球体1的球心和第二球体2的球心所在的直线为中轴呈中心对称。内壳5的一端延伸至第一球体1或第二球体2的外侧。内壳5用于收容距离传感器3。透明外盖6与内壳5可拆卸式连接并形成密封结构,以使定向测量装置在待测量液体中保持体积和质量不变。透明外盖6设置在距离传感器3的探测方向上。内壳5为空心圆柱体或空心长方体。内壳5可以采用与第一球体1或第二球体2相同的材料,也可以采用其他金属材料、塑料材料或复合材料等。外盖可以采用塑料材料、玻璃材料或其他透明的晶体材料等,只要具备硬度高、透明度高的特点即可。
44.在第一球体1或第二球体2内还可以安装通信装置4。通信装置4与距离传感器3连通,用于实时传输距离传感器3测量的间距数据,以便于对距离传感器3实时采集的间距数据进行记录。通信装置4可以采用蓝牙通信装置、网络通信装置、无线电通信装置等。
45.本实施例提供的定向测量装置放置在由两种密度不同且互不相溶的液态纯净物混合而成的混合液体中,由于混合液体在静置条件下受重力作用自然分层,定向测量装置自动沉降到与其自身密度相同的液体位置。则位于定向测量装置重心下方的液体密度均大于定向测量装置的整体密度,而位于定向测量装置重心上方的液体密度均小于定向测量装置的整体密度。第一球体1受到的浮力大于自身重力,对装置整体提供向上的浮力。第二球体2的自身重力大于所受的浮力,对装置整体提供向下的压力。进而使得第一球体1始终处于第二球体2的正上方,以使距离传感器3竖直向上或竖直向下,通过距离传感器3测量其自身与待检测的混合液体的顶面(液面)或底面的间距,也即混合液体分层后的最顶层液态纯净物深度或最底层液态纯净物深度。本实施例的定向测量装置可以根据待测量的液态纯净物层的深度变化自动调节测量位置,且在待测液体中始终保持探测端朝向同一方向,能测量出混合液体分层后的液态纯净物层的深度,具有操作简单便捷、整体密度可调、应用范围广的特点。
46.实施例2请参阅图6,其为本实施例的基于浮力的定向测量方法的步骤图。基于浮力的定向测量方法包括如下过程:s1:获取液态纯净物a的密度ρa以及液态纯净物b的密度ρb,根据待测量的液态纯净物计算定向测量装置的整体密度ρe。整体密度ρe满足条件:其中,μ为在混合液体分层后的待测量层中相应的液态纯净物的最低含量,ρm为待测量的液态纯净物的密度,ρa为混合液体中另一液态纯净物的密度。
47.当定向测量装置的整体密度为ρe时,ρ
min
≤ρe≤ρ
max
,其中,ρ
min
为混合液体中密度最小的液态纯净物的密度,ρ
max
为混合液体中密度最大的液态纯净物的密度。此时,定向测量装置的重心处于两种液态纯净物的混合层并趋近于待测量的液态纯净物层。
48.s2:判断待测量的液态纯净物的密度是否大于另一液态纯净物的密度。是则配置一个整体密度为ρe且距离传感器安装在第二球体内的定向测量装置。否则配置一个整体密
度为ρe且距离传感器安装在第一球体内的定向测量装置,并在混合液体的液面上放置一个浮层。
49.当定向测量装置测量密度较大的液态纯净物层时,定向测量装置趋近于该液态纯净物层的底面并向下探测,距离传感器探测其自身与混合液体底面(或用于储存混合液体的容器底面)的间距,进而可以计算出该液态纯净物层的实际深度。
50.当定向测量装置测量密度较小的液态纯净物层时,定向测量装置趋近于该液态纯净物层的底面并向上探测,距离传感器探测其自身与浮层的间距,进而可以计算出该液态纯净物层的实际深度。
51.当第二球体采用实心球体时,配置定向测量装置的方法如下:s211:选择一个密度大于任一液态纯净物的第二球体。获取第二球体的质量m2及体积v2。
52.s212:获取待安装的距离传感器及通信装置的总重量me,进而计算出第一球体的质量和体积范围,以使配置成的定向测量装置的整体密度为ρe。根据密度计算公式ρ=m/v可知,第一球体的质量m1与体积v1满足条件:。
53.当第二球体采用空心球体时,配置定向测量装置的方法如下:s221:获取定向测量装置在未填充任意填充物时的体积v0和质量m0,根据填充物的密度ρf计算填充物的重量mf。向定向测量装置中添加重量为mf的填充物。填充物的重量满足条件:。
54.可以看出,当第二球体采用空心球体时,仅需计算待填充的填充物的重量,并将定量的填充物填充到第二球体内,即可完成对定向测量装置的密度调节。相较于采用实心球体,第二球体采用具有填充物的空心球体时,定向测量装置的整体密度调节范围更广、调节效率更高。
55.s3:将待测量的定向测量装置放置在待测量的混合液体中。在重力作用下,定向测量装置的距离传感器竖直向上或竖直向下。读取距离传感器实时测量其自身与待测量的混合液体的液面或底面的间距d。根据定向测量装置的中心与距离传感器的探测端的间距s计算待测量的液态纯净物层的深度h。则深度h表达为:h=d s。
56.实施例3请参阅图7,其为本实施例的采用图1中基于浮力的定向测量装置的油水分离方法的步骤图。根据实施例1的定向测量装置的特性及功能,将定向测量装置应用在含油污水的处理中。本实施提供一种基于定向测量装置的油水分离方法。油水分离方法包括如下步骤:s1:在含油污水的液面上放置一块浮层。浮层的密度小于油的密度且浮层覆盖在含油污水的液面上。浮层为疏水疏油性材料,其厚度小于0.1mm,对实际测量的油层深度误差可以忽略不计。浮层的实际密度不大于0.2g/cm3,浮层放置在含油污水中,受重力作用始终漂浮在含油污水的液面上。采用一个整体密度为ρ1的第一定向测量装置测量含油污水中的油层深度。油层深度的具体测量方法如下:
s11:根据回收油的最大含水量(回收油中水体积的最大百分比)μw计算第一定向测量装置的整体密度ρ1。则第一定向测量装置的整体密度ρ1表达为:其中,ρw为水的密度,ρo为油的密度。
57.s12:将一个整体密度为ρ1的第一定向测量装置放入待处理的含油污水中。其中,第一定向测量装置包括第一球体、第二球体、距离传感器一和通信装置一。第一球体为空心球体。第二球体为实心球体。第一球体和第二球体可拆卸式连接。距离传感器一和通信装置一均安装在第一球体内,且距离传感器一与通信装置一连通。在实际应用中,可以将第一球体、距离传感器一和通信装置一组装为一个整体,且第一球体、距离传感器一和通信装置一的整体密度小于油的密度。测量整体体积及重量,进而选择规格不同的第二球体与第一球体可拆卸式连接,以使第一定向测量装置的整体密度达到ρ1或处于ρo~ρ1之间。在本实施例中,第一球体的自身密度小于0.2g/cm3,第一球体、距离传感器一和通信装置一的整体密度小于0.3g/cm3,第二球体的自身密度大于2g/cm3,当然,在其他实施例中,第一球体、第二球体的密度还可以更大或者更小,只要能在油水混合的污水中始终保持第一球体在第二球体的正上方即可。在重力作用下,第一定向测量装置的重心位于油层的底面且距离传感器一的探测端竖直向上。
58.s13:距离传感器一探测其自身与浮层的间距df,进而根据距离传感器一的探测端与第一定向测量装置的重心的间距h
m1
计算油层深度ho。则油层深度ho表达为:。
59.其中,df为第一定向测量装置的探测端与浮层的间距,h
m1
为第一定向测量装置的重心与第一定向测量装置的探测端的间距。
60.在其他实施例中,若含油污水收容在密闭容器(如污水处理箱等)内,则可以直接通过第一定向测量装置测量距离传感器一的探测端与密闭容器的内定面的间距,并通过其他间距测量装置测量污水液面与密闭容器的内顶面的间距,进而得到油层的深度。同时可根据密闭容器自身的内高度(内顶面与内底面的间距)计算出油层底面与密闭容器底面的间距。
61.s2:判断油层深度是否大于一个预设的阈值一。是则对待处理的含油污水进行吸油直至油层深度小于一个预设的阈值二。吸油的具体方法如下:s21:测量含油污水的总深度hs。含油污水的总深度可以通过距离传感器或液位计进行测量。其中,当采用距离传感器测量含油污水的深度时,距离传感器安装在用于收容含油污水的容器(如污水处理箱等)内顶面,距离传感器探测其自身与含油污水液面的间距,进而根据容器的总深度(污水处理箱的内顶面与内底面的间距)计算出含油污水的总深度。
62.s22:计算含油污水中油层底面距离含油污水底面的高度h
os
。h
os
表达为:。
63.s23:将用于吸油的管道的输入口移动至高于油层底面一个预设高度的位置,启动吸油装置进行吸油,直至油层的深度低于一个预设的阈值二。吸油管道的输入口高于油层
底面,可以避免在吸油过程中将含水量超出预设标准的油水混合液体吸出。油层的深度始终处于阈值一与阈值二之间,不仅可以保持油水分离的效率,同时可以减小吸油的次数,降低油水分离的运行成本。
64.当油层深度ho大于阈值一时,表明含油污水在静置后完成部分分层,油层的深度已达到预设的回收标准。从高于油层的底部一个阈值二的位置处对含油污水中的油进行回收,以避免将尚未分层的油水混合层回收到储油装置中,保持回收油中的含水量始终低于预设的最大含水量(如5%)。由于回收的油层中任意位置处的含水量不高于最大含水量,实际回收油的含水量远低于最大含水量(如实际排放的含水量低于1%)。
65.s3:采用一个整体密度为ρ2的第二定向测量装置测量含油污水中的水层深度。水层深度的具体测量方法如下:s31:根据污水排放的最大含油量μo计算第二定向测量装置的整体密度ρ2。则第二定向测量装置的整体密度ρ2表达为:其中,ρw为水的密度,ρo为油的密度。
66.s32:将一个整体密度为ρ2的第二定向测量装置放入待处理的含油污水中。其中,第二定向测量装置包括第三球体、第四球体、距离传感器二和通信装置二。第三球体为空心球体。第四球体为实心球体。第三球体和第四球体可拆卸式连接。距离传感器二和通信装置二均安装在第四球体内,且距离传感器二与通信装置二连通。在实际应用中,可以将第四球体、距离传感器二和通信装置二组装为一个整体,且第四球体、距离传感器二和通信装置二的整体密度大于水的密度。测量第四球体、距离传感器二和通信装置二的整体体积及重量,进而选择规格不同的第三球体与第四球体可拆卸式连接,以使第二定向测量装置的整体密度达到ρ2或处于ρ2~ρw之间。在本实施例中,第三球体的自身密度小于0.2g/cm3,第二球体的自身密度大于2g/cm3,第四球体、距离传感器二和通信装置二的整体密度大于2g/cm3。当然,在其他实施例中,第三球体、第四球体的密度还可以更大或者更小,只要能在油水混合的污水中始终保持第三球体在第四球体的正上方即可。在重力作用下,第二定向测量装置的重心位于水层的顶面且距离传感器二的探测端竖直向下。
67.s33:距离传感器二探测其自身与含油污水底面的间距ds,进而根据距离传感器二的探测端与第二定向测量装置的重心的间距h
m2
计算水层深度hw。则水层深度hw表达为: 其中,ds为第二定向测量装置的探测端与含油污水底面的间距,h
m2
为第二定向测量装置的探测端与第二定向测量装置的重心的间距。
68.距离传感器二实际测量其自身与用于处理含油污水的容器底面的间距。
69.s4:判断水层深度是否大于一个预设的阈值三。是则从含油污水的底部进行排水直至水层深度小于一个预设的阈值四。
70.当水层深度hw大于阈值三时,表明含油污水在静置后完成部分分层,水层的深度已达到预设的排放标准。从污水处理箱的底部对污水进行排放,以避免将尚未分层的油水混合层排放出去。当水层深度hw小于阈值四时,由于在排放过程中污水在靠近排放口的位
置处的水流量大于其他位置处的水流量,即便排放速度低,依然会导致油水混合层部分混入已分层的水层中。因此,在预留一定深度(阈值四)后,可以保持排出的污水中,含油量始终低于排放标准(如5%)。由于排放的水层中任意位置处的含油量不高于排放标准,实际排放的含油量远低于排放标准(如实际排放的含油量低于1%)。
71.s5:测量含油污水的总深度。判断含油污水的总深度是否小于一个预设的阈值五。是则向含油污水中补充污水以使含油污水的总深度大于一个预设的阈值六。其中,补充的污水导入含油污水中的油水混合层中。
72.在对含油污水进行排水或吸油后,污水液面下降。可以向污水处理箱中继续添加含油污水,以使污水处理箱中的污水量保持在一个预设的范围内,提高污水分层的效率。需要注意的是,污水应当从油水混合层的深度范围内导入,避免对已分层的水层和油层造成干扰。在实际应用中,可以根据预设的水层深度及油层深度判断油水混合层的一般深度,进而将含油污水的进水口设置在污水处理箱的中部,以满足在污水进水时始终导入油水混合层内。
73.此外,还可以对污水处理箱进行持续导入含油污水,以使污水处理箱中的含油污水达到动态平衡,即在排水、吸油及进水之间形成平衡,以使污水处理箱内的含油污水总量始终处于一个预设的范围内,从而实现对含油污水的实时处理。
74.含油污水在重力作用下静置分层,其中,油层的密度最小,位于污水的最上层。水层的密度最大,位于污水的最下层。油层与水层之间则为油水混合层,其密度自上而下逐渐增加。
75.采用两个定向测量装置(第一定向测量装置和第二定向测量装置)分别检测油层与水层的深度。在本实施例中,第一定向测量装置的整体密度为0.8~0.81g/cm3。将第一定向测量装置放置于含油污水中,则第一定向测量装置自动沉降至靠近于油层的最底面。位于第一定向装置重心上方的液体密度均小于0.81,即处于第一定向装置重心上方任意一处的油层含水量不高于5%(设油层回收的标准含水量不高于5%)。设第一定向测量装置中,距离传感器一的探测端与第一定向测量装置的重心的间距为h
m1
,通过距离传感器一探测其自身与油层顶面(实际探测如在油层顶面放置的漂浮物)的间距ho,或探测距离传感器与污水处理箱顶面的间距h1,并通过安装在污水处理箱顶面的其他距离传感装置测量油层顶面与污水处理箱顶面的间距h3,进而得到油层的实际深度ho=h1 h
m1
-h3。
76.第二定向测量装置的整体密度处于0.99~1g/cm3。将第二定向测量装置放置于含油污水中。第二定向装置在含油污水中下沉至接近于水层的最顶面。其中,位于第二定向装置重心下方的液体密度均大于0.99g/cm3,即在第二定向装置重心下方任意一处的污水含油量不高于5%(设污水排放的标准含油量不高于5%)。设第二定向测量装置中,距离传感器二的探测端与第二定向测量装置的重心的间距为h
m2
,通过第二定向测量装置的距离传感器探测其自身与含油污水底面(实际探测污水处理箱或污水处理池的底面)的间距h2,得到水层的实际深度hw=h2 h
m2
。
77.本实施例提供的油水分离方法,可以根据油水分离的状态进行实时或间歇式的油水分离,同时动态补偿含油污水,以使在不影响原有污水静置分层的前提下,实现含油污水的分离与进水,进而提高油水分离的效率。同时,本实施例的油水分离方法可以对污水进行实时处理,解决现有的静置分层方法处理含油污水的局限性,提高油水分离的效率。
78.实施例4请参阅图8,其为本实施例的基于定向测量装置的油水分离装置的剖面结构示意图。为了实现实施例2中的油水分离方法,本实施例提供一种基于定向测量装置的油水分离装置。油水分离装置包括:外箱10、第一定向测量装置30、第二定向测量装置40、距离传感器三20、排水装置50、吸油装置60、加热器70和控制器。
79.外箱10可以为空心的长方体、圆柱体等。外箱10的中心位置处连通一个进水管,含油污水通过进水管导入外箱10内。本实施例中,外箱10为空心长方体,外箱10的内高度(外箱10内顶面与内底面的间距)为2m。当然,在其他实施例中,外箱10的内高度还可以更高或者更低,外箱10也可以替换为污水处理池等。
80.请结合图9,其为图8中第一定向测量装置的剖面结构示意图。第一定向测量装置30包括球体一301、球体二302、距离传感器一303和通信装置一304。球体一301为空心球体。球体二302为实心球体。球体一301和球体二302可拆卸式连接。球体一301和球体二302可以采用金属材料,也可以采用陶瓷材料、塑料材料或复合材料等,只要具备足够的强度及密封性能即可。球体一301和球体二302在探测过程中始终保持体积、形状和重量均无变化,且防水性能好,避免因液体渗入、粘附在球体一301或球体二302内导致其密度发生变化。在其他实施例中,球体一301也可以为材料密度小于阈值一的实心球体。球体二302也可以为带有填充物的空心球体。当球体二302采用具有填充物的空心球体时,球体二302内的填充物应始终保持与球体二302不产生相对位移。如当球体二302采用粉末状物质填充时,应将球体二302内的腔体全部充满并密封。
81.球体一301和球体二302可以采用螺接、卡接等方式实现可拆卸式连接。需要注意的是,无论采用何种连接方式,均需要保持球体一301与球体二302相对密封,以使第一定向测量装置30在液体中体积、重量均不发生变化,也即始终保持整体密度不变。则根据实际测量密度的要求,可以采用规格不同的球体一301与球体二302进行组合,以改变定向测量装置的整体密度,使其能够应用在密度不同的液体中。如在球体二302保持不变的情况下,通过采用质量相同、体积各异的球体一301进行分别组合,以使定向测量装置的整体密度处于预设的密度范围内。
82.距离传感器一303和通信装置一304均安装在球体一301内。距离传感器一303安装在球体一301内。相应的,球体一301内设置有用于收容距离传感器一303的空腔。为了便于安装或拆卸距离传感器一303,还可以在球体一301内设置内壳一,内壳一延伸至球体一301的外侧,且内壳一上可拆卸式连接一个透明的外盖一。内壳一为空心圆柱体或空心长方体。内壳一位于球体一301与球体二302构成的葫芦形结构的轴线上,以使安装距离传感器一303后,第一定向测量装置30的整体重心位于球体一301的球心和球体二302的球心所在的直线上,进而使得当第一定向测量装置30放置在待检测的液体中时,球体一301始终位于球体二302的正上方,且距离传感器一303的探测端始终竖直向上。内壳一可以采用与球体一301相同的材料,也可以采用其他金属材料、塑料材料或复合材料等。外盖一可以采用塑料材料、玻璃材料或其他透明的晶体材料等,只要具备硬度高、透明度高的特点即可。在采用不同规格的距离传感器一303时,只要距离传感器一303能够安装在内壳一内,则定向测量装置的整体体积无变化。当然,距离传感器一303与球体一301的整体密度不能大于预设的阈值一,以使当第一定向测量装置30位于待探测的液体中时,球体二302始终位于球体一
301的正下方。距离传感器一303安装在内壳以内时,距离传感器一303的探测端始终背向球体一301的球心和球体二302的球心,也即始终竖直向上。
83.通信装置一304同样安装在球体一301内的内壳一内,且通信装置一304与距离传感器一303连通,用于实时传输距离传感器一303检测的间距数据。通信装置一304可以采用蓝牙通信装置、网络通信装置、无线电通信装置等。
84.第一定向测量装置30放置在外箱10内,用于实时测量外箱10内的含油污水在静置分层时的油层底面与外箱10内顶面的间距。第一定向测量装置30的整体密度ρ1为: 其中,ρw为水的密度,ρo为油的密度。
85.第一定向测量装置30放置在外箱10内,受重力作用,第一定向测量装置30自动沉降到外箱10内的含油污水中与第一定向测量装置30密度相同或接近的区域,且球体一301位于球体二302的正上方。在本实施例中,第一定向测量装置30的整体密度为0.8~0.81g/cm3。将第一定向测量装置30放置于含油污水中,则第一定向测量装置30自动沉降至靠近于油层的最底面。位于第一定向装置重心上方的液体密度均小于0.81,即处于第一定向装置重心上方任意一处的油层含水量不高于5%(设油层回收的标准含水量不高于5%)。
86.请结合图10,其为图8中第二定向测量装置的剖面结构示意图。第二定向测量装置40包括球体三401、球体四402、距离传感器二403和通信装置二404。球体三401与球体四402可拆卸式连接,以使球体三401与球体四402的整体重心位于球体四402内,且该重心位于球体三401的球心和球体四402的球心所在的直线上。球体三401与球体四402共同构成葫芦形结构。球体四402的体积不小于球体三401的体积,以使当球体三401与球体四402构成的葫芦形结构位于待探测的液体中时,球体四402始终位于球体三401的正下方。
87.球体三401可以为空心球体,也可以为材料密度小于阈值一的实心球体。球体四402可以为实心球体,也可以为带有填充物的空心球体。当球体四402采用具有填充物的空心球体时,球体四402内的填充物应始终保持与球体四402不产生相对位移。如当球体四402采用粉末状物质填充时,应将球体四402内的腔体全部充满。
88.球体三401和球体四402在探测深度范围内保持无形变,以使球体三401和球体四402的整体体积保持不变。球体三401和球体四402可以采用金属材料,也可以采用陶瓷材料、塑料材料或复合材料等,只要具备足够的强度及密封性能即可。球体三401和球体四402在探测过程中始终保持体积、形状和重量均无变化,且防水性能好,避免因液体渗入、粘附在球体三401或球体四402内导致其密度发生变化。
89.球体三401和球体四402可以采用螺接、卡接等方式实现可拆卸式连接。需要注意的是,无论采用何种连接方式,均需要保持球体三401与球体四402相对密封,以使定向测量装置在液体中体积、重量均不发生变化,也即始终保持整体密度不变。则根据实际测量密度的要求,可以采用规格不同的球体三401与球体四402进行组合,以改变定向测量装置的整体密度,使其能够应用在密度不同的液体中。如在球体四402保持不变的情况下,通过采用质量相同、体积各异的球体三401进行分别组合,以使定向测量装置的整体密度处于预设的密度范围内。
90.距离传感器二403安装在球体四402内。相应的,球体四402内设置有用于收容距离
传感器二403的空腔。为了便于安装或拆卸距离传感器二403,还可以在球体三401内设置内壳二,内壳二延伸至球体三401的外侧,且内壳二上可拆卸式连接一个透明的外盖二。内壳二为空心圆柱体或空心长方体。内壳二位于球体三401与球体四402构成的葫芦形结构的轴线上,以使安装距离传感器二403后,第二定向测量装置40的整体重心位于球体三401的球心和球体四402的球心所在的直线上,进而使得当第二定向测量装置40放置在待检测的液体中时,球体三401始终位于球体四402的正上方,且距离传感器二403的探测端始终竖直向下。内壳二可以采用与球体三401相同的材料,也可以采用其他金属材料、塑料材料或复合材料等。外盖二可以采用塑料材料、玻璃材料或其他透明的晶体材料等,只要具备硬度高、透明度高的特点即可。在采用不同规格的距离传感器二403时,只要距离传感器二403能够安装在内壳二内,则第二定向测量装置40的整体体积无变化。距离传感器二403安装在内壳二内时,距离传感器二403的探测端始终背向球体三401的球心和球体四402的球心,也即始终竖直向下。
91.通信装置二404同样安装在球体四402内的内壳二内,且通信装置二404与距离传感器二403连通,用于实时传输距离传感器二403检测的间距数据。通信装置二404可以采用蓝牙通信装置、网络通信装置、无线电通信装置等。
92.第二定向测量装置40的整体密度ρ2表达为:。
93.第二定向测量装置40放置在外箱10内,受重力作用,第二定向测量装置40自动沉降到外箱10内的含油污水中与第二定向测量装置40密度相同或接近的区域,且球体三401位于球体四402的正上方。第二定向测量装置40的整体密度处于0.99~1g/cm3。将第二定向测量装置40放置于含油污水中。第二定向装置在含油污水中下沉至接近于水层的最顶面。其中,位于第二定向装置重心下方的液体密度均大于0.99g/cm3,即在第二定向装置重心下方任意一处的污水含油量不高于5%(设污水排放的标准含油量不高于5%)。
94.在本实施例中,球体一301、球体二302、球体三401和球体四402均采用不锈钢材料,且球体一301和球体三401为空心球体,球体二302和球体四402为实心球体。球体二302的体积小于球体一301的体积,球体四402的体积小于球体三401的体积。球体一301和球体三401的密度均小于0.2g/cm3。球体二302和球体四402的密度均大于2g/cm3。
95.为了提高检测精度,防止第一定向测量装置30和第二定向测量装置40受到油污粘附或腐蚀,可以在第一定向测量装置30和第二定向测量装置40上分别做覆膜处理。覆膜采用抗腐蚀性强、耐磨性强的防水防油材料,如采用塑料覆膜。需要注意的是,覆膜不可遮挡距离传感器的探测端,当然,可以采用透明覆膜包覆整个定向测量装置。
96.外箱10内的含油污水在静置后自动分层,即从上至下的油层、油水混合层和水层。其中,油层的密度约为0.8g/cm3,水层的密度不低于1g/cm3。油水混合层的密度则处于0.8~1g/cm3之间,且油水混合层的密度由上至下逐渐增加。
97.将第一定向测量装置30和第二定向测量装置40共同放置在外箱10内。受到重力作用,第一定向测量装置30的重心趋近于油层的底面,距离传感器一303竖直向上,用于检测其探测端与外箱10内顶面的间距h1。第二定向测量装置40的重心趋近于水层的顶面,距离传感器二403竖直向下,用于检测其探测端与外箱10内底面的间距h2。
98.距离传感器三20安装在外箱10的内顶面上,用于实时监测其自身与污水液面的间距,也即污水液面与外箱10顶面的间距h3。距离传感器一303、距离传感器二403和距离传感器三20可以采用红外距离传感器、光学距离传感器或超声波距离传感器等,只要能测量其自身与待测量物体间的相对距离即可。
99.设第一定向测量装置30中,距离传感器一303的探测端与第一定向测量装置30的重心的间距为h
m1
,则油层深度ho可以表示为:ho=h1+h
m1
-h3。
100.设第二定向测量装置40中,距离传感器二403的探测端与第二定向测量装置40的重心的间距为h
m2
,则水层深度hw可以表示为:hw=h2-h
m2
。
101.排水装置50包括排水管501和电子阀门502。排水管501与外箱10的底部连通。电子阀门502安装在排水管501上,用于控制排水管501与外箱10的连通状态。
102.吸油装置60包括油泵603、吸油管602、油箱604和驱动组件601。吸油管602的输出端与油泵603的输入口连通,吸油管602的输入端穿过外箱10的顶部并与外箱10连通。吸油管602靠近外箱10的一端设置为伸缩管。油泵603的输出口通过管道与油箱604连通。驱动组件601的一端与吸油管602的输入端固定连接,驱动组件601的另一端与外箱10固定连接。驱动组件601用于驱动吸油管602的输入端升降,以使吸油装置60能在含油污水中的任意深度进行吸油。驱动组件601可以是电缸、电动伸缩杆等,驱动组件601可以根据预设的升降距离驱动吸油管602升降,进而通过油泵603将污水中的油层泵入油箱604内。
103.加热器70安装在外箱10上,用于对外箱10内的含油污水加热。加热器70可以是碳纤维加热器70、红外加热器70或电磁加热器70等。本实施例中采用红外加热器70,红外加热器70可以对含油污水进行无接触加热,可以避免油污附着,保持高效的加热及保温效果。
104.控制器分别与通信装置一304、通信装置二404、距离传感器三20、电子阀门502以及油泵603连通。控制器用于:a、分别接收通信装置一304和通信装置二404传输的距离信号。采集距离传感器三20实时测量的距离信号。根据相应的距离信号计算含油污水中的油层深度和水层深度。则油层深度ho和水层深度hw分别表示为:其中,h1为距离传感器一303的探测端与外箱10内顶面的间距,h
m1
为距离传感器一303的探测端与第一定向测量装置30的重心的间距,h2为距离传感器二403的探测端与外箱10内底面的间距,h
m2
为距离传感器二403的探测端与第二定向测量装置40的重心的间距。
105.b、判断水层深度hw是否大于一个预设的阈值d1,是则打开电子阀门502,直至hw小于一个预设的阈值d2。
106.当hw大于一个预设的阈值d1时,表明含油污水在静置后完成部分分层,水层的深度已达到预设的排放标准。从污水处理箱的底部对污水进行排放,以避免将尚未分层的油水混合层排放出去。当hw小于阈值d2时,由于在排放过程中污水在靠近排放口的位置处的水流量大于其他位置处的水流量,即便排放速度低,依然会导致油水混合层部分混入已分层的水层中。因此,在预留一定深度后d2,可以保持排出的污水中,含油量低于排放标准(如5%)。
由于排放的水层中任意位置处的含油量不高于排放标准,实际排放的含油量远低于排放标准(如实际排放的含油量低于1%)。
107.c、判断油层深度ho是否大于一个预设的阈值d3,是则计算吸油管602入口端的理想高度,进而根据理想高度控制驱动组件601驱动吸油管602升降,启动油泵603进行吸油,直至油层深度ho小于一个预设的阈值d4。
108.当ho大于阈值d3时,表明含油污水在静置后完成部分分层,油层的深度已达到预设的回收标准。从污水液面的顶端向下进行吸油,或者直接将吸油管602道的入口端竖直向下移动至预设的高度,即距离污水处理箱内顶面ds=s-h1-h
m1
+d4(s为污水处理箱中内顶面与内底面的间距)位置处,避免将油水混合层部分的液体吸入油箱604,减小回收油中的含水量。当油层深度ho小于一个预设的阈值d4时,停止吸油,以避免回收的油层中含水量超出标准(如5%)。
109.d、判断污水液面与外箱10内顶面的间距h3是否大于一个预设的阈值d5,是则控制打开电子阀门502一,向外箱10内导入含油污水,直至h3小于一个预设的阈值d6。
110.在对含油污水进行排水或吸油后,污水液面下降。可以向污水处理箱中继续添加含油污水,以使污水处理箱中的污水量保持在一个预设的范围内,提高污水分层的效率。需要注意的是,污水应当从油水混合层的深度范围内导入,避免对已分层的水层和油层造成干扰。在实际应用中,可以根据预设的水层深度及油层深度判断油水混合层的一般深度,进而将含油污水的进水口设置在污水处理箱的中部,以满足在污水进水时始终导入油水混合层内。
111.此外,通过控制器统计并计算污水处理的效率,还可以对污水处理箱进行持续导入含油污水,以使污水处理箱中的含油污水达到动态平衡,即在排水、吸油及进水之间形成平衡,以使污水处理箱内的含油污水量始终处于一个预设的范围内,从而实现对含油污水的实时处理。
112.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
113.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。