一种gnss信号失锁条件下小型无人船自主导航方法
技术领域
1.本发明涉及无人船导航技术领域,特别涉及一种gnss信号失锁条件下小型无人船自主导航方法。
背景技术:
2.小型无人船在水面自动航行时一般利用gnss、imu等设备用于定位、测速、测姿,在gnss信号良好时可以为无人船航行提供精确导航信息。但在航行到桥洞、岸边树木遮挡区域时gnss接收信号变差甚至信号失锁,导致无人船失去定位信息而无法自主航行。
3.现有技术的不足之处在于,目前采用gnss/imu组合导航方式,在gnss信号失锁时仅依靠imu导航,但应用于小型无人船的imu受成本限制,精度差、易发散,难以维持长时间高精度导航,无法满足无人船gnss信号失锁时长航时导航需求。
技术实现要素:
4.本发明的目的在于克服现有技术存在的不足,为实现以上目的,采用一种gnss信号失锁条件下小型无人船自主导航方法,以解决上述背景技术中提出的问题。
5.一种gnss信号失锁条件下小型无人船自主导航方法,包括:
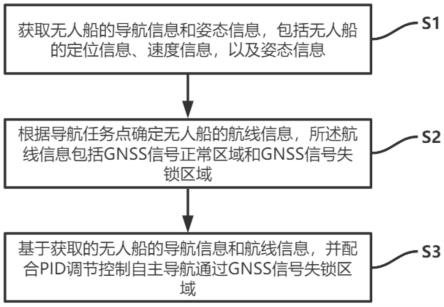
6.获取无人船的导航信息和姿态信息,包括无人船的定位信息、速度信息,以及姿态信息;
7.根据导航任务点确定无人船的航线信息,所述航线信息包括gnss信号正常区域和gnss信号失锁区域;
8.基于获取的无人船的导航信息和航线信息,并配合pid调节控制无人船自主导航通过gnss信号失锁区域。
9.作为本发明的进一步的方案:所述获取无人船的导航信息和姿态信息的具体步骤包括:
10.利用gnss和ahrs获取无人船的导航信息和姿态信息,所述gnss提供无人船导航信息,包括定位、速度信息,所述ahrs测量无人船的姿态信息,包括航向角、俯仰角,以及横滚角。
11.作为本发明的进一步的方案:所述根据导航任务点确定无人船的航线信息的具体步骤包括:
12.获取导航任务点的起始点和终点;
13.根据船载控制器判断是否能够实时获取无人船的gnss信号,若是则为gnss信号正常区域,否则为gnss信号失锁区域。
14.作为本发明的进一步的方案:所述基于获取的无人船的导航信息和航线信息,并配合pid调节控制无人船自主导航通过gnss信号失锁区域的具体步骤包括:
15.当无人船进入gnss信号失锁区域时,无人船利用ahrs实时测量自身的航向角,以及根据当前航线确定的航向为目标航向;
16.根据得到的航向角和目标航向,基于pid实时调节控制无人船以预设油门值驶出gnss信号失锁区域。
17.作为本发明的进一步的方案:无人船电机的控制油门对应的船速要提前标定,在设定无人船以某个固定速度穿越gnss信号失锁区域时,以该设定速度对应的电机控制油门值作为基值,并在此基础上进行调节控制;
18.无人船自主导航通过gnss信号失锁区域的航行控制计算方法为:
19.err=nav_bearing-boat_bearing
20.bearing_output=kp*(err-err_last) ki*err kd*(err-2*err_last err_last_last)
21.err_last_last=err_last
22.err_last=err
23.其中,err为目标航向与无人船当前航向之间差值;
24.err_last为上次计算的航向角误差;
25.err_las_last为上上次计算的航向角误差;
26.nav_bearing为目标航向,由任务航线确定;
27.boat_bearing为无人船当前航向,由ahrs获取;
28.bearing_output为航向角误差pid的计算;
29.kp、ki、kd为pid调节参数,由用户自行整定得到;
30.完成上述计算后将(bearing_output 油门值)作为控制信号发送到控制器以控制电机动作,达到航向控制,从而控制无人船驶出gnss信号失锁区域。
31.与现有技术相比,本发明存在以下技术效果:
32.采用上述的技术方案,通过利用获取无人船的导航信息和姿态信息,并根据任务点确定航线信息,从而计算确定无人船在gnss信号失锁区域的航向,完成自主导航任务。从而解决gnss信号失锁时无法为小型无人船提供长航时、高精度的自主导航的问题。
附图说明
33.下面结合附图,对本发明的具体实施方式进行详细描述:
34.图1为本技术公开实施例的自主导航方法的步骤示意图;
35.图2为本技术公开实施例的自主导航方法的流程框图;
36.图3为本技术公开实施例的无人船穿越桥洞场景示意图。
具体实施方式
37.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
38.请参考图1和图2,本发明实施例中,一种gnss信号失锁条件下小型无人船自主导航方法,包括:
39.s1、获取无人船的导航信息和姿态信息,包括无人船的定位信息、速度信息,以及
姿态信息,具体步骤包括:
40.利用gnss和ahrs获取无人船的导航信息和姿态信息,所述gnss提供无人船导航信息,包括定位、速度信息,所述ahrs测量无人船的姿态信息,包括航向角、俯仰角,以及横滚角。
41.本实施例中,利用gnss和ahrs为无人船提供导航信息,gnss可以为无人船提供定位、速度信息,ahrs测量姿态信息(航向角、俯仰角、横滚角)。
42.s2、根据导航任务点确定无人船的航线信息,所述航线信息包括gnss信号正常区域和gnss信号失锁区域;具体步骤包括:
43.获取导航任务点的起始点和终点;
44.根据船载控制器判断是否能够实时获取无人船的gnss信号,若是则为gnss信号正常区域,否则为gnss信号失锁区域。
45.s3、基于获取的无人船的导航信息和航线信息,并配合pid调节控制无人船自主导航通过gnss信号失锁区域,具体步骤包括:
46.当无人船进入gnss信号失锁区域时,无人船利用ahrs实时测量自身的航向角,以及根据当前航线确定的航向为目标航向;
47.根据得到的航向角和目标航向,基于pid实时调节控制无人船以预设油门值驶出gnss信号失锁区域。
48.本实施例中,应用场景如图3所示。航线ab由航点a与b确定,在桥洞外能够接收gnss信号时无人船可获取到自身的位置、速度信息(航线上的ac与db是gnss信号正常区间),cd区间段是gnss信号失锁区域,在该区域无人船无法获取自身的位置及速度信息,无人船自动控制算法需要实时获取到无人船的位置信息以控制无人船实现路径跟踪,此时采用常规控制算法无法生效,从而导致无人船无法穿越cd区间段。本发明主要就是用于解决无人船穿越cd区间的问题:一旦gnss信号失锁,此时无人船利用ahrs测量自身的航向角,以航线ab确定的航向为目标航向,采用pid调节控制无人船沿着ab确定的航向、以设定的油门值(控制速度)驶过cd区间,从而完成穿越gnss信号失锁区域。
49.err=nav_bearing-boat_bearing
50.bearing_output=kp*(err-err_last) ki*err kd*(err-2*err_last err_last_last)
51.err_last_last=err_last
52.err_last=err
53.其中,err为目标航向与无人船当前航向之间差值;
54.err_last为上次计算的航向角误差;
55.err_las_last为上上次计算的航向角误差;
56.nav_bearing为目标航向,由任务航线确定;
57.boat_bearing为无人船当前航向,由ahrs获取;
58.bearing_output为航向角误差pid的计算;
59.kp、ki、kd为pid调节参数,由用户自行整定得到;
60.将(bearing_output 油门值)用于控制电机动作,从而保证无人船按照规划航向自主航行并穿越gnss信号失锁区域。
61.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
