技术特征:
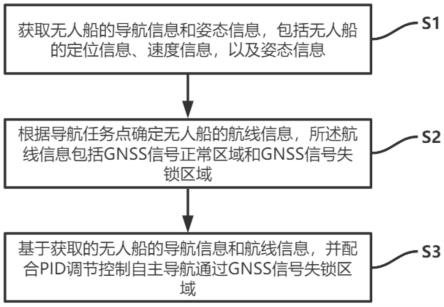
1.一种gnss信号失锁条件下小型无人船自主导航方法,其特征在于,所述自主导航方法的具体步骤包括:获取无人船的导航信息和姿态信息,包括无人船的定位信息、速度信息,以及姿态信息;根据导航任务点确定无人船的航线信息,所述航线信息包括gnss信号正常区域和gnss信号失锁区域;基于获取的无人船的导航信息和航线信息,并配合pid调节控制无人船自主导航通过gnss信号失锁区域。2.根据权利要求1所述一种gnss信号失锁条件下小型无人船自主导航方法,其特征在于,所述获取无人船的导航信息和姿态信息的具体步骤包括:利用gnss和ahrs获取无人船的导航信息和姿态信息,所述gnss提供无人船导航信息,包括定位、速度信息,所述ahrs测量无人船的姿态信息,包括航向角、俯仰角,以及横滚角。3.根据权利要求1所述一种gnss信号失锁条件下小型无人船自主导航方法,其特征在于,所述根据导航任务点确定无人船的航线信息的具体步骤包括:获取导航任务点的起始点和终点;根据船载控制器判断是否能够实时获取无人船的gnss信号,若是则为gnss信号正常区域,否则为gnss信号失锁区域。4.根据权利要求1所述一种gnss信号失锁条件下小型无人船自主导航方法,其特征在于,所述基于获取的无人船的导航信息和航线信息,并配合pid调节控制无人船自主导航通过gnss信号失锁区域的具体步骤包括:当无人船进入gnss信号失锁区域时,无人船利用ahrs实时测量自身的航向角,以及根据当前航线确定的航向为目标航向;根据得到的航向角和目标航向,基于pid实时调节控制无人船以预设电机油门值驶出gnss信号失锁区域。5.根据权利要求4所述一种gnss信号失锁条件下小型无人船自主导航方法,其特征在于,无人船电机的控制油门对应的船速要提前标定,在设定无人船以某个固定速度穿越gnss信号失锁区域时,以该设定速度对应的电机控制油门值作为基值,并在此基础上进行调节控制;无人船自主导航通过gnss信号失锁区域的航行控制计算方法为:err=nav_bearing-boat_bearingbearing_output=kp*(err-err_last) ki*err kd*(err-2*err_last err_last_last)err_last_last=err_lasterr_last=err其中,err为目标航向与无人船当前航向之间差值;err_last为上次计算的航向角误差;err_las_last为上上次计算的航向角误差;nav_bearing为目标航向,由任务航线确定;boat_bearing为无人船当前航向,由ahrs获取;
bearing_output为航向角误差pid的计算;kp、ki、kd为pid调节参数,由用户自行整定得到;完成上述计算后将(bearing_output 油门值)作为控制信号发送到控制器以控制电机动作,达到航向控制,从而控制无人船驶出gnss信号失锁区域。
技术总结
本发明公开了一种GNSS信号失锁条件下小型无人船自主导航方法,包括获取无人船的导航信息和姿态信息,包括无人船的定位信息、速度信息,以及姿态信息;根据导航任务点确定无人船的航线信息,所述航线信息包括GNSS信号正常区域和GNSS信号失锁区域;基于获取的无人船的导航信息和航线信息,并配合PID调节控制无人船自主导航通过GNSS信号失锁区域。本发明通过获取无人船的导航信息和姿态信息,并根据任务点确定航线信息,从而计算确定无人船在GNSS信号失锁区域的航向,完成自主导航任务,从而解决GNSS信号失锁时无法为小型无人船提供长航时、高精度的自主导航的问题。高精度的自主导航的问题。高精度的自主导航的问题。
技术研发人员:闫刚 张新钊
受保护的技术使用者:安徽科微智能科技有限公司
技术研发日:2022.09.28
技术公布日:2022/12/30
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。