1.本发明涉及一种植物巡察机器人。
背景技术:
2.目前农业的生产开始向集中化和规模化转变,温室种植面积累年增加,在此背景下温室内各种检测手段就成了必不可少的设备。目前用于温室内环境监测的传感器大多数都是固定式的,且只有一定的监测范围,为此需在温室里放置多个检测传感器,以保证大型温室环境监测的准确性。 然而,在实际由于温室结构不同,放置传感器的数量,以及放置距离都有一些不可抗拒的因素在里面,这就导致监测数据的准确性不足。由于现代温室的规模化越来越大,不同区域,不同高度,环境都不一样,而固定的安装检测范围有限,放置位置及数量都可能影响到适用面积,放置的少了检测不准确, 而多个传感器一起工作也会有误差的积累。
3.中国专利授权号cn211107770u中介绍了一种农用自动导航牵引车,包括:驱动总成,转向总成,agv控制总成,手动控制总成,其中,所述驱动总成由交流电机后桥、驱动轮和减震装置组成,交流电机后桥为整车的动力总成,固定于车辆底盘下侧,与底盘通过减震装置连接,前面为agv导向舵轮,后面连个为驱动轮,前轮通过接收预设在地面的磁条或磁棒来感知电磁信号从而实现转向及轨道偏离矫正,用于解决果蔬农作物等的搬运牵引问题。但其没有解决温室环境监测问题。
4.中国专利授权号cn214954692 u中介绍了一种农用自动导航牵引车温室巡检机器人及温室环境立体监测系统,温室巡检机器人包括移动盘、环境监测装置、导航装置、高度检测装置及控制装置;移动底盘上设有升降机构;环境监测装置设于升降机构的升降端,环境监测装置用于采集温室内的环境参数;环境监测装置、导航装置及高度检测装置分别与控制装置通讯连接,控制装置还与移动底盘及升降机构通讯连接;控制装置用于基于导航装置与高度检测装置所采集的数据,实时获取环境监测装置的空间坐标。可实现对温室内各个位置的环境分布进行准确监测。但无法对土壤或培养基状态进行检测,且监测方法落后。
技术实现要素:
5.本发明的目的在于克服上述不足,提供一种植物巡察机器人,能较全面地对温室内环境和植物进行监测。
6.为了实现上述目的,本发明采用的技术方案为:一种植物巡察机器人,包括机壳和触模屏,植物巡察机器人还包括行走移动模块,环境检测模块,控制通讯模块,行走检测模块;行走移动模块,用于运行环境检测模块,控制通讯模块,行走检测模块,行走移动模块包括驱动底盘,境检测模块,控制通讯模块和行走检测模块均位于驱动底盘上;环境检测模块,用于采集温室内环境和植物数据,环境检测模块包括位于驱动底
盘的上端面前部升降架装置顶端的检测装置和位于升降架装置后侧的驱动底盘上端面两侧边上的取样装置;控制通讯模块,用于读取控制行走移动模块、环境检测模块和行走检测模块,包括对应控制箱一侧的机壳上端面设有的触模屏、控制通讯系统、人工智能的图像识别、远程终端及通过互联网相连的专家系统。
7.行走检测模块,用于配合控制通讯模块指令运行行走移动模块。
8.作为上述技术方案的进一步描述:所述行走移动模块包括驱动底盘,环境检测模块、控制通讯模块和行走检测模块均位于驱动底盘上,中空的机壳设置在驱动底盘的上端面,升降架装置位于驱动底盘的上端面前部,电源固定架位于驱动底盘的上端面后部,控制箱位于电源固定架后侧面的控制柜架上,取样装置位于升降架装置与电源固定架之间的驱动底盘上端面两侧,对应控制箱一侧的机壳上端面设有触模屏,其中:所述驱动底盘,用于运行机器人,驱动底盘的下端面周边设有边裙板,边裙板两侧前、后部分别对应设有一对轮轴座,从动轮轴的两端轴设在前部一对轮轴座上,从动轮轴的两侧设有从动轮,主动轮轴的两端轴设在后部一对轮轴座上,主动轮轴的两侧设有主动轮,一侧主动轮内侧的主动轮轴上设有从动链轮,位于从动链轮前侧的驱动底盘下端面上设有行走电机,行走电机的主动链轮通过链条传动从动链轮,位于从动轮轴后部的驱动底盘下端面上设有若干个呈间隔离分布的底盘固定耳,对应底盘固定耳的转向板上端面上设有转向板固定耳,有定距长度的若干个连接轴板的两端分别通过轴杆与对应的底盘固定耳和转向板固定耳轴接,转向板下端面左侧角部分别设有万向轮,转向板下端面右侧角部分别纵车向设有横轮固定轴座,两横轮固定轴座的内侧分别设有第一、二横移电机,第一、二横移电机的电机轴分别与对应的横轮固定轴座轴接后与位于横轮固定轴座另一端的第一、二横移轮连接,转向板下端面后侧中部并排设有两伸缩杆固定耳,对应两伸缩杆固定耳后侧的驱动底盘下端面上设有两液压缸固定耳,两转向液压缸的伸缩杆通过轴与两伸缩杆固定耳轴接,两转向液压缸后端通过轴与两液压缸固定耳轴接;所述升降架装置,用于升降检测装置,升降架装置由若干根升降杆和升降液压缸所构成,各升降杆的前侧面纵向设有燕尾凸条,各升降杆的后侧面纵向设有供燕尾凸条滑配的燕尾槽,各相邻的升降杆通过燕尾凸条滑配在燕尾槽内实现升降对接,燕尾凸条的下端设有由弹簧顶持的限位卡舌,燕尾槽的上部对应限位卡舌设有卡舌槽,后侧的升降杆下端固定在驱动底盘的上端面前部,前侧的升降杆上端和连接板上固定有传感器安装板,前侧的升降杆下端与对应的驱动底盘上端面上设有升降液压缸,升降液压缸的伸缩杆设在前侧的升降杆下端上;所述取样装置,用于承载运行获取土壤或培养基中的植物生长信息的传感或检测器,所述取样装置由采集杆、动力板、支撑架板、采集液压缸、传感或检测器、采集液压缸固定耳和转向轴所构成,支撑架板位于升降架装置与电源固定架之间的驱动底盘上端面两侧,采集杆呈弧形,传感或检测器位于采集杆的上端外侧,采集杆的下端面与动力板的前端通过转向轴固定为一体,转向轴的两侧通轴承轴接在支撑架板上端,动力板的后端与采集液压缸的伸缩杆轴接,采集液压缸的后端通过采集液压缸固定耳轴接在对应的驱动底盘上端面上。
9.作为上述技术方案的进一步描述:所述机壳的上端面设有供升降架装置伸出的孔
道,对应取样装置两侧的机壳侧面或上部上设有供取样杆探出的条状道孔。
10.作为上述技术方案的进一步描述:所述有定距长度的若干个连接轴板的长度为连接轴板的轴线与驱动底盘的下端面呈90
0 夹角时连接轴板下端面上的第一、二横移轮和万向轮的下端面位于从动轮下端,两转向液压缸的伸缩杆缩进时方向轮及第一、二横移轮悬空。
11.作为上述技术方案的进一步描述:所述电源固定架内设有电池。
12.作为上述技术方案的进一步描述:所述环境检测模块的检测装置位于升降架装置顶端的传感器安装板上,气体传感器位于传感器安装板的下端面上,植物特征摄像头及热成像传感器位于传感器安装板的上端面前部,光照传感器、风向传感器和风速传感器位于传感器安装板的上端面后部;传感或检测器包括ph传感器、微型摄像头和土壤肥力检测器,微型摄像头分别位于采集杆的上端,ph传感器和土壤肥力检测器分别位于取样装置的左、右采集杆的上端外侧。
13.作为上述技术方案的进一步描述:所述取样装置由采集杆、动力板、采集升降液压缸、采集液压缸、传感或检测器、微型摄像头、电动转盘,采集液压缸固定耳和转向轴所构成,电动转盘至少位于升降架装置与电源固定架之间的驱动底盘上端面一侧,采集升降液压缸的下端固定在电动转盘上端面,采集杆呈弧形,微型摄像头位于采集杆的上端,传感或检测器位于采集杆的上端外侧,采集杆的下端面与动力板的前端通过转向轴固定为一体,转向轴的两侧通轴承轴接在采集升降液压缸伸缩杆上端,动力板的后端与采集液压缸的伸缩杆上端轴接,采集液压缸的后端通过采集液压缸固定耳轴接在对应的采集液压缸的伸缩杆上端。
14.作为上述技术方案的进一步描述:所述行走检测模块包括位于机壳前后端面上的位置摄像头、行走电机通过主动链轮、链条、从动链轮带动的主动轮,和位于转向板下端由两第一、第二转向电机驱动的第一、二横移轮,及转向液压缸根据所携带的光电编码器确定转向板的升降距离,位置摄像头、行走电机、转向液压缸、第一、第二转向电机和光电编码器与控制通讯模块信号连接。
15.作为上述技术方案的进一步描述:所述行走检测模块还包括设置在驱动底盘的前、后端面下部的保险杠及接触性防碰撞传感器,接触性防碰撞传感器与控制通讯模块信号连接。
16.一种植物巡察机器人的巡察方法,包括如下步骤:(1)依据设定的植物巡察机器人的巡察路线将温室内分为有不同标号的若干个区域;(2)植物巡察机器人依据远程终端设定程序先对温室内不同标号的各区域进行常规巡察;常规巡察包括各区域的co2、温度、湿度、光照强度、风速、植物特征图像;并实时将采集的数据和特征图像传至远程终端,远程终端将数据和特征图像与设定的数据阈值和病害植物数据图像进行对比;若全部正常,作正常记录;若其中有一项异常,作异常记录并依照所在区域先后记录异常顺序号;植物巡察机器人继续对下一区域进行常规巡察,至温室内全部区域常规巡察完
毕;(3)依据远程终端根据异常顺序号对植物巡察机器人设定程序顺序前往异常记录区域进行复查巡检;复查巡检只对该区域的异常数据或异常特征图像、土壤ph值和肥力进行复查;并实时将采集的复查数据和复查特征图像传至远程终端,远程终端将复查数据和复查特征图像与设定的数据阈值和病害植物数据图像进行对比;若复查的数据或特征图像正常,更正、作正常记录;若复查的数据或特征图像仍异常,远程终端依据专家系统识别该区域的病害及原因并作报警处理;(4) 重复步骤(3) 植物巡察机器人继续对下一异常记录区域进行复查巡检,至温室内全部异常记录区域复查完毕;(5) 远程终端收到人员对报警处理反馈信息后,重复(2) 至(5) 步骤。
17.作为上述技术方案的进一步描述:所述专家系统包括为通过互联网相通各农研所、农学院的植物病害诊断数据库。
18.本发明的有益效果为:1、本发明结构简单,制造成本低,转弯半径小,机动灵活。
19.2、本发明配有取样装置和升降架装置可以对温室内地面、空中的各种状态进行全面检测,升降架装置可以在任意位置高度停止进行检测并进行数据分析;取样装置通过采集液压缸的伸缩杆顶持动力板后端带动采集杆下端沿支撑架板上端的转向轴向外呈半圆形旋转并使其上的传感或检测器扎入温室内土壤或培养基中,可获取土壤或培养基中的植物生长信息,或通过采集升降液压缸及电动转盘、微型摄像头等获取高层培养基中的植物生长信息。
20.3、本发明检测方法简单实用,通过本发明检测方法能够在较少时间内获取温室内地面、空中的各种状态及植物生长信息,为温室内植物增产提供支持。且可通过摄像头采集温室中植物图片,使用人工智能、深度学习等技术,开展植物长势识别算法研究,对植物的叶,茎,花,果的颜色,大小,数量等参数进行判别植物的长势,结果率等;也可基于颜色/大小/水分/等指标信息,判定植物成熟度及果实品质(优等、中等),机器人有自主学习能力可以通过积累的大量数据自主学习,还可以联网或通过远程终端加入云端数据库,将数据存入云端,进行云端分析,减少机器自己运行负荷。
附图说明
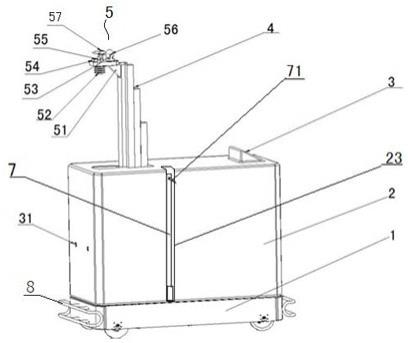
21.图1是本发明的总体结构示意图;图2是本发明的内部结构分布示意图;图3是本发明的取样装置结构示意图;图4是本发明的取样装置另一实施例的结构示意图;图5是本发明的驱动底盘直行时的结构示意图;图6是图5的侧面结构示意图;图7是本发明的驱动底盘转向时的结构示意图;图8是图7的侧面结构示意图;图9是本发明的升降杆的局部结构示意图;
图10是本发明控制模块示意图。
22.图中:1、驱动底盘;11、横轮固定轴座;12。轮轴座;13、万向轮;14、底盘固定耳;15、连接轴板;16、转向板固定耳;17、转向板;18、边裙板;19、液压固定耳;100、主动链轮;101,从动链轮;102、行走电机;103、主动轮轴;104、第一横移轮;105、第一转向电机;106、第二转向电机;107、伸缩杆固定耳;108、第二横移轮;109、转向液压缸;110、主动轮;111,从动轮;2、机壳;21、电源固定架;22、控制柜架;3、触摸屏;31、位置摄像头;32、控制柜;4、升降架装置;41、升降液压缸;42、升降伸缩杆;43、升降杆;44、燕尾凸条;45、燕尾槽;46、卡舌槽;47、限位卡舌;48、弹簧;5、检测装置;51、连接板;52、气体传感器;53、传感器安装板;54、光照传感器;55、风速传感器; 56、风向传感器;57、摄像及热成像传感器;6、电源;7、采集杆;71、动力板;72、支撑架板;73、采集液压缸;74、传感器或检测器;75、采集液压缸固定耳;76、转向轴;77、采集液压缸伸缩杆;78、采集升降液压缸;79、电动转盘;8、接触性防碰撞传感器。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。下述实施例中的实验方法,如无特殊说明,均为常规方法,下述实施例中所用的材料、装置、试剂等,如无特殊说明,均可从商业途径得到。
24.实施例1:如图1~10所示,一种植物巡察机器人,包括机壳2和触模屏3,植物巡察机器人还包括行走移动模块,环境检测模块,控制通讯模块,行走检测模块。
25.行走移动模块,用于运行环境检测模块。控制通讯模块,行走检测模块,行走移动模块包括驱动底盘1,环境检测模块、控制通讯模块和行走检测模块均位于驱动底盘上。
26.环境检测模块,用于采集温室内环境和植物数据。环境检测模块包括位于驱动底盘的上端面前部升降架装置4顶端的检测装置5和位于升降架装置后侧的驱动底盘上端面两侧边上的取样装置。
27.控制通讯模块,用于读取控制行走移动模块、环境检测模块和行走检测模块。包括对应控制箱32一侧的机壳上端面设有的触模屏、控制通讯系统、人工智能的图像识别、远程终端及通过互联网相连的专家系统。触模屏用于显示控制通讯模块状态及输入程序。
28.控制通讯模块可为带有互联通讯模块的机载计算机、工业pc机等,控制通讯模块可通过热成像技术实现无损伤检测,还以预防病虫害,通过摄像头采集温室中植物图片,使用人工智能、深度学习等技术,开展植物长势识别算法研究,对植物的叶,茎,花,果的颜色,大小,数量等参数进行判别植物的长势,结果率等。也可基于颜色/大小/水分/等指标信息,判定植物成熟度及果实品质(优等、中等)机器人有自主学习能力可以通过积累的大量数据自主学习,还可以联网或通过远程终端加入云端数据库,将数据存入云端,进行云端分析,减少机器自己运行负荷。
29.行走检测模块,用于配合控制通讯模块指令运行行走移动模块。
30.如图1~9所示,行走移动模块包括驱动底盘1,环境检测模块、控制通讯模块和行走检测模块均位于驱动底盘上。中空的机壳2设置在驱动底盘1的上端面,机壳的上端面设有供升降架装置伸出的孔道,对应取样装置两侧的机壳侧面或上部上设有供取样杆探出的
条状道孔23。升降架装置4位于驱动底盘的上端面前部。电源固定架21位于驱动底盘的上端面后部,电源固定架内设有电池6,用于对各部件供电。控制箱32位于电源固定架后侧面的控制柜架22上,其内设有控制通讯模块。取样装置位于升降架装置与电源固定架之间的驱动底盘上端面两侧,对应控制箱一侧的机壳上端面设有触模屏3,其中:驱动底盘1,用于运行机器人。驱动底盘的下端面周边设有边裙板18,边裙板两侧前、后部分别对应设有一对轮轴座12,从动轮轴的两端轴设在前部一对轮轴座上,从动轮轴的两侧设有从动轮111,主动轮轴103的两端轴设在后部一对轮轴座上,主动轮轴的两侧设有主动轮110,一侧主动轮内侧的主动轮轴上设有从动链轮101,位于从动链轮前侧的驱动底盘下端面上设有行走电机102,行走电机的主动链轮100通过链条传动从动链轮。位于从动轮轴后部的驱动底盘下端面上设有若干个呈间隔离分布的底盘固定耳14,对应底盘固定耳的转向板17上端面上设有转向板固定耳16,有定距长度的若干个连接轴板15的两端分别通过轴杆与对应的底盘固定耳和转向板固定耳轴接,有定距长度的若干个连接轴板的长度为连接轴板的轴线与驱动底盘的下端面呈90
0 夹角时连接轴板下端面上的第一、二横移轮和万向轮的下端面位于从动轮下端,即第一、二横移轮和万向轮顶持在地面上,从动轮下端悬空;两转向液压缸的伸缩杆缩进时方向轮及第一、二横移轮悬空。转向板下端面左侧角部分别设有万向轮13,转向板下端面右侧角部分别纵车向设有横轮固定轴座11,两横轮固定轴座的内侧分别设有第一横移电机105、二横移电机106,第一、二横移电机的电机轴分别与对应的横轮固定轴座轴接后与位于横轮固定轴座另一端的第一横移轮104、第二横移轮108连接。转向板下端面后侧中部并排设有两伸缩杆固定耳107,对应两伸缩杆固定耳后侧的驱动底盘下端面上设有两液压缸固定耳19,两转向液压缸的伸缩杆通过轴与两伸缩杆固定耳轴接,两转向液压缸109后端通过轴与两液压缸固定耳轴接。
31.如图5~6所示,机器人直行时,由控制通讯模块控制的行走电机通过主动链轮100、链条传动从动链轮,使主动轮轴和主动轮转动,配合驱动底盘前端的从动轮,使驱动底盘直行,此时由控制通讯模块控制的两转向液压缸109的伸缩杆呈收缩状态,使转向板17及连接轴板沿底盘固定耳14呈向后上收状态,使位于转向板下端面上的万向轮、第一、二横移轮的下端轮面均高于主、从动轮下端轮面,万向轮、第一、二横移轮处于悬空状态。
32.如图7~8所示,机器人转向时,由控制通讯模块控制的行走电机停止转动,此时由控制通讯模块控制的两转向液压缸的伸缩杆伸出,使转向板及连接轴板沿底盘固定耳呈向前下伸出状态,使位于转向板下端面上的万向轮、第一、二横移轮的下端轮面均低于主、从动轮下端轮面,万向轮、第一、二横移轮处于顶持驱动底盘状态,主、从动轮处于悬空状态,由控制通讯模块控制的第一、二横移电机分别带动第一、二横移轮及万向轮,同向移动配合主动轮,完成转向。
33.第一、二横移电机、行走电机均为由控制通讯模块控制的伺服电机。第一、二横移电机、行走电机、两转向液压缸均通过各光电编码器与控制通讯模块信号连接。
34.如图2和图9所示,升降架装置4,用于升降检测装置。升降架装置由若干根升降杆43和升降液压缸41所构成,各升降杆的前侧面纵向设有燕尾凸条44,各升降杆的后侧面纵向设有供燕尾凸条滑配的燕尾槽45,各相邻的升降杆通过燕尾凸条滑配在燕尾槽内实现升降对接,燕尾凸条的下端设有由弹簧48顶持的限位卡舌47,燕尾槽的上部对应限位卡舌设有卡舌槽46,用于各升降杆的升降限位。后侧的升降杆下端固定在驱动底盘的上端面前部,
前侧的升降杆上端和连接板51上固定有传感器安装板53,前侧的升降杆下端与对应的驱动底盘上端面上设有升降液压缸41,升降液压缸的伸缩杆42设在前侧的升降杆下端上。传感器安装板上设有各检测传感器,由控制通讯模块控制的升降液压缸带动升降架装置使位于升降杆上端的传感器安装板上的各检测传感器升入温室内上部空间任意高度实施各项检测, 即在对植物及环境检测时升降架装置开始工作,在空间不同的位置,不同的高度进行检测并将数据上传,进行数据分析。
35.如图2~4所示,取样装置,用于承载运行获取土壤或培养基中的植物生长信息的传感或检测器。取样装置由采集杆7、动力板71、支撑架板72、采集液压缸73、传感或检测器74、采集液压缸固定耳75和转向轴76所构成。支撑架板位于升降架装置与电源固定架之间的驱动底盘上端面两侧,采集杆7呈弧形。传感或检测器位于采集杆的上端外侧,采集杆的下端面与动力板的前端通过转向轴固定为一体,转向轴的两侧通轴承轴接在支撑架板上端,动力板的后端与采集液压缸的伸缩杆轴接,采集液压缸的后端通过采集液压缸固定耳轴接在对应的驱动底盘上端面上。各采集液压缸均通过各光电编码器与控制通讯模块信号连接。
36.当需获取土壤或培养基中的植物生长信息时,启动一侧或两侧的采集液压缸,各采集液压缸由控制通讯模块控制,采集液压缸的伸缩杆顶持动力板71后端带动采集杆7下端沿支撑架板72上端的转向轴76向外呈半圆形旋转并使其上的传感或检测器扎入温室内土壤或培养基中,获取土壤或培养基中的植物生长信息,反之收进。
37.环境检测模块的检测装置5位于升降架装置4顶端的传感器安装板53上,气体传感器52位于传感器安装板的下端面上,植物特征摄像头及热成像传感器57位于传感器安装板的上端面前部,光照传感器54、风向传感器56和风速传感器55位于传感器安装板的上端面后部。传感或检测器包括ph传感器、微型摄像头和土壤肥力检测器,微型摄像头分别位于采集杆的上端,微型摄像头用于向控制通讯模块传导各传感器所处位置及传感或检测器周边的植物生长信息,ph传感器和土壤肥力检测器分别位于取样装置的左、右采集杆的上端外侧。各传感器、微型摄像头和土壤肥力检测器均与控制通讯模块信号连接。
38.行走检测模块包括位于机壳前后端面上的位置摄像头31、行走电机通过主动链轮、链条、从动链轮带动的主动轮,和位于转向板下端由两第一、第二转向电机驱动的第一、二横移轮,及转向液压缸根据所携带的光电编码器确定转向板的升降距离,位置摄像头、行走电机、转向液压缸、第一、第二转向电机和各光电编码器与控制通讯模块信号连接。
39.机壳前后端面上的位置摄像头31可识别预先在地面规划好的导航标识,记录驱动底盘所处位置,并回传至控制通讯模块,控制通讯模块依据设定程序在设定的位置上,启动环境检测模块,完成设定的位置上的各项检测,并该位置上获取的各项检测数据后,驱动底盘继续巡检,直至遍历所有待检测温室植物区域。
40.驱动底盘的前、后端设有保险杠及接触性防碰撞传感器8,配合位置摄像头用来检测是否有障碍物存在,并通过控制通讯模块使驱动底盘自动停止行走、转向或进行报警。保险杠及接触性防碰撞传感器与控制通讯模块信号连接。
41.一种植物巡察机器人的巡察方法,包括如下步骤:(1)依据设定的植物巡察机器人的巡察路线将温室内分为有不同标号的若干个区域,巡察路线为温室内植物巡察机器人能通过的主干道或通道。若干个区域为在温室内划
分的若干个区域,可根据不同植物分类划分、栽培条件划分;(2)植物巡察机器人依据远程终端设定程序先对温室内不同标号的各区域进行常规巡察;常规巡察包括各区域的co2、温度、湿度、光照强度、风速、植物特征图像;并实时将采集的数据和特征图像传至远程终端,远程终端将数据和特征图像与设定的数据阈值和病害植物数据图像进行对比;远程终端可为以联网加入云端数据库、能将数据存入云端、进行云端分析的计算机。
42.若全部正常,作正常记录;若其中有一项异常,作异常记录并依照所在区域先后记录异常顺序号;植物巡察机器人继续对下一区域进行常规巡察,至温室内全部区域常规巡察完毕;(3)依据远程终端根据异常顺序号对植物巡察机器人设定程序顺序前往异常记录区域进行复查巡检;复查巡检只对该区域的异常数据或异常特征图像、土壤ph值和肥力进行复查;如常规巡察时确认植物叶面图像异常;则复查巡检只对该区域的植物叶面图像异常进行重新复查巡检,启动升降架装置4顶端的植物特征摄像头及热成像传感器,重新获取该区域的异常特征图像,并实时将采集的复查数据和复查特征图像传至远程终端,远程终端将复查数据和复查特征图像与设定的数据阈值和病害植物数据图像进行对比;若复查的数据或特征图像正常,更正、作正常记录;若复查的数据或特征图像仍异常,远程终端依据专家系统识别该区域的病害及原因并作报警处理;(4) 重复步骤(3) 植物巡察机器人继续对下一异常记录区域进行复查巡检,至温室内全部异常记录区域复查完毕;(5) 远程终端收到人员对报警处理反馈信息后,重复(2) 至(5) 步骤。
43.专家系统包括为通过互联网相通各农研所、农学院的植物病害诊断数据库。
44.实施例2:如图4所示,与实施例不同的是:取样装置由采集杆7、动力板71、采集液压缸73、采集升降液压缸78、传感或检测器74、微型摄像头710、电动转盘79、采集液压缸固定耳和转向轴所构成。电动转盘至少位于升降架装置与电源固定架之间的驱动底盘上端面一侧,采集升降液压缸的下端固定在电动转盘上端面,采集杆呈弧形,微型摄像头710位于采集杆的上端,传感或检测器74位于采集杆的上端外侧,采集杆的下端面与动力板的前端通过转向轴76固定为一体,转向轴的两侧通轴承轴接在采集升降液压缸伸缩杆77上端,动力板的后端与采集液压缸的伸缩杆上端轴接,采集液压缸的后端通过采集液压缸固定耳轴接在对应的采集液压缸的伸缩杆上端。采集液压缸、电动转盘、微型摄像头、采集升降液压缸均通过各光电编码器与控制通讯模块信号连接。
45.当需要获取温室内高层培养基中的植物生长信息时,启动采集升降液压缸78,采集升降液压缸伸缩杆带动采集杆7、动力板71、采集液压缸73、传感或检测器74和微型摄像头710升至与高层培养基水平位置空间,电动转盘79转动,带动采集升降液压缸转动将采集杆7对准高层培养基,通过微型摄像头710获取状态信息的控制通讯模块控制采集升降液压缸启动,采集液压缸的伸缩杆顶持动力板71后端带动采集杆7下端沿支撑架板72上端的转向轴76向外呈半圆形旋转并使其上的传感或检测器扎入温室内高层培养基中,获取高层培
养基中的植物生长信息,反之收进。其余相同,故不再累述。
46.本发明所用的各模块、传感器等均为市场上所售产品。
47.上述说明示出并描述了本技术的若干优选实施例,但如前所述,应当理解本技术并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述申请构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本技术的精神和范围,则都应在本技术所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。