1.本技术涉及环卫车技术领域,具体涉及一种基于机器视觉的洗扫车作业速度自适应控制方法及系统。
背景技术:
2.洗扫车是道路清扫车系列中的一款路面清扫保洁车辆。具有路面清洗、路面清扫路缘和路缘石立面洗刷、低压冲洗、喷雾除尘等多功能。有“全洗扫”、“左洗扫”、“右洗扫”、“全扫”、多种作业模式可选择。选择“全洗扫”模式清洗广场和路面,清洗效率高效果好,洗净率达95%以上。选择“左洗扫”或“右洗扫”模式清洗路面和路缘。需要进行路面清扫或路面保洁作业时,可选择扫路模式。需要喷雾除尘时,可开启喷雾装置,进行喷雾除尘作业。可以像洒水车一样对路面进行低压冲洗作业。洗扫车适用于城市道路、高速公路、广场、机场、码头、隧道、桥梁、隔离墙避、路缘和路缘石立面的机械化清洗、清扫、喷雾降尘等清洁作业。
3.洗扫车作业速度影响扫净率,驾驶员根据经验、路面垃圾种类和垃圾数量做出决策,控制洗扫车作业速度。驾驶员为达到较好作业效果,会放慢作业速度,影响洗扫车作业效率,增加能耗。并且路面垃圾分布不均,具有时变性,为达到较好清扫效果和提高效率,驾驶员需经常变换洗扫车作业速度,劳动强度大,极易疲劳,增加驾驶危险性。
技术实现要素:
4.鉴于上述问题,本技术提供了一种基于机器视觉的洗扫车作业速度自适应控制方法及系统,解决现有洗扫车清扫的作业速度需要根据驾驶员的经验做出决策而导致作业效率低、驾驶员劳动强度大,增加驾驶危险性的问题。
5.为实现上述目的,发明人提供了一种基于机器视觉的洗扫车作业速度自适应控制方法,包括以下步骤:
6.通过设置在洗扫车前方的前部机器视觉系统获取洗扫车前方道路的路面垃圾信息;
7.第一调节器根据前方道路的路面垃圾信息输出作业速度控制基础信号;
8.通过设置在洗扫车后方的后部机器视觉系统获取洗扫车后方道路的扫净率;
9.第二调节器根据后方道路的扫净率输出扫净率反馈信号;
10.根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号;
11.根据得到的实际驱动信号进行控制洗扫车作业速度。
12.进一步优化,还包括以下步骤:
13.通过霍尔传感器获取洗扫车的当前作业速度并转化为作业速度反馈信号;
14.所述步骤“根据后方道路的扫净率调节作业速度控制基础信号得到实际驱动信号”具体包括以下步骤:
15.将作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得到偏差和偏差率;
16.计算得到的偏差及偏差率输入模糊推理调节器输出控制参数;
17.pid控制器根据模糊推理调节器输出的控制参数输出实际驱动信号。
18.进一步优化,所述步骤“计算得到的偏差及偏差率输入模糊推理调节器输出控制参数”具体包括以下步骤:
19.计算得到的偏差及偏差率输入模糊推理调节器;
20.模糊推理调节器根据mandimi算法进行计算得到控制参数,所述控制参数包括比例k
p
、积分ki以及微分kd。
21.进一步优化,所述步骤“pid控制器根据模糊推理调节器输出的控制参数输出实际驱动信号”具体包括以下步骤:
22.当收到模糊推理调节器输出的控制参数后,pid控制器根据作业速度控制模型输出实际驱动信号,所述作业速度控制模型为
23.进一步优化,所述步骤“根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号”具体包括以下步骤:
24.根据后方道路的当前扫净率与最低扫净率及最优扫净率进行比较,确定当前扫净率所在的扫净率梯度;
25.根据当前扫净率所在的扫净率梯度对应的调节系数对作业速度控制基础信号进行调整得到实际驱动信号。
26.还提供了另一个技术方案:基于机器视觉的洗扫车作业速度自适应控制系统,包括;
27.前部机器视觉系统,所述前部机器视觉系统设置在洗扫车前方,所述前部机器视觉系统用于获取洗扫车前方道路的路面垃圾信息;
28.第一调节器,所述第一调节器用于根据前方道路的路面垃圾信息输出作业速度控制基础信号;
29.后部机器视觉系统,所述后部机器视觉系统设置在洗扫车后方,所述后部机器视觉系统用于获取洗扫车后方道路的扫净率;
30.第二调节器,所述第二调节器用于根据后方道路的扫净率输出扫净率反馈信号;
31.处理模块,所述处理模块用于根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号;
32.行走控制器,所述行走控制器用于根据得到的实际驱动信号进行控制洗扫车作业速度。
33.进一步优化,还包括:
34.霍尔传感器,所述霍尔传感器用于获取洗扫车的当前作业速度并转化为作业速度反馈信号;
35.所述处理模块还包括模糊推理调节器及pid控制器;
36.所述处理模块用于将作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得到偏差和偏差率,并输入模糊推理调节器;
37.所述模糊推理调节器用于根据计算得到的偏差及偏差率输出控制参数;
38.所述pid控制器用于根据模糊推理调节器输出的控制参数输出实际驱动信号。
39.进一步优化,所述模糊推理调节器用于根据mandimi算法进行计算得到控制参数,所述控制参数包括比例k
p
、积分ki以及微分kd。
40.进一步优化,所述pid控制器还用于当收到模糊推理调节器输出的控制参数后,根据作业速度控制模型输出实际驱动信号,所述作业速度控制模型为
41.进一步优化,所述处理模块还用于根据后方道路的当前扫净率与最低扫净率及最优扫净率进行比较,确定当前扫净率所在的扫净率梯度;根据当前扫净率所在的扫净率梯度对应的调节系数对作业速度控制基础信号进行调整得到实际驱动信号。
42.区别于现有技术,上述技术方案,当洗扫车工作时,通过设置在洗扫车前方的前部机器视觉系统进行获取洗扫车前方道路的路面垃圾信息,路面垃圾信息包括垃圾种类及垃圾数量,第一调节器根据前方道路的路面垃圾信息进行输出作业速度控制基础信号;而通过设置在洗扫车后方的后部机器视觉系统进行获取洗扫车后方道路的扫净率,第二调节器根据后方道路的扫净率进行输出扫净率反馈率;然后根据后方道路的扫净率对作业速度控制基础信号进行计算得到实际驱动信号,然后根据得到的实际驱动信号进行控制洗扫车作业速度。通过提供一种洗扫车自适应扫净率和路面垃圾分布的作业速度控制策略,达到洗扫车的作业速度自适应匹配路面垃圾分布和扫净率,无需驾驶员根据经验进行控制洗扫车作业速度,提高洗扫车作业效率,降低驾驶劳动强度,提高驾驶员安全性和舒适性,减少无效能耗。
43.上述发明内容相关记载仅是本技术技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本技术的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本技术的上述目的及其它目的、特征和优点能够更易于理解,以下结合本技术的具体实施方式及附图进行说明。
附图说明
44.附图仅用于示出本技术具体实施方式以及其他相关内容的原理、实现方式、应用、特点以及效果等,并不能认为是对本技术的限制。
45.在说明书附图中:
46.图1为具体实施方式所述基于机器视觉的洗扫车作业速度自适应控制方法的一种流程示意图;
47.图2为具体实施方式所述基于机器视觉的洗扫车作业速度自适应控制方法的另一种流程示意图;
48.图3为具体实施方式所述步骤s150的另一种流程示意图;
49.图4为具体实施方式所述基于机器视觉的洗扫车作业速度自适应控制系统的一种流程示意图;
50.图5为具体实施方式所述基于机器视觉的洗扫车作业速度自适应控制系统的一种流程示意图。
51.上述各附图中涉及的附图标记说明如下:
52.410、前部机器视觉系统;
53.420、第一调节器;
54.430、后部机器视觉系统;
55.440、第二调节器;
56.450、处理模块,451、模糊推理调节器,452、pid控制器;
57.460、行走控制器。
具体实施方式
58.为详细说明本技术可能的应用场景,技术原理,可实施的具体方案,能实现目的与效果等,以下结合所列举的具体实施例并配合附图详予说明。本文所记载的实施例仅用于更加清楚地说明本技术的技术方案,因此只作为示例,而不能以此来限制本技术的保护范围。
59.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中各个位置出现的“实施例”一词并不一定指代相同的实施例,亦不特别限定其与其它实施例之间的独立性或关联性。原则上,在本技术中,只要不存在技术矛盾或冲突,各实施例中所提到的各项技术特征均可以以任意方式进行组合,以形成相应的可实施的技术方案。
60.除非另有定义,本文所使用的技术术语的含义与本技术所属技术领域的技术人员通常理解的含义相同;本文中对相关术语的使用只是为了描述具体的实施例,而不是旨在限制本技术。
61.在本技术的描述中,用语“和/或”是一种用于描述对象之间逻辑关系的表述,表示可以存在三种关系,例如a和/或b,表示:存在a,存在b,以及同时存在a和b这三种情况。另外,本文中字符“/”一般表示前后关联对象是一种“或”的逻辑关系。
62.在本技术中,诸如“第一”和“第二”之类的用语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何实际的数量、主次或顺序等关系。
63.在没有更多限制的情况下,在本技术中,语句中所使用的“包括”、“包含”、“具有”或者其他类似的表述,意在涵盖非排他性的包含,这些表述并不排除在包括所述要素的过程、方法或者产品中还可以存在另外的要素,从而使得包括一系列要素的过程、方法或者产品中不仅可以包括那些限定的要素,而且还可以包括没有明确列出的其他要素,或者还包括为这种过程、方法或者产品所固有的要素。
64.与《审查指南》中的理解相同,在本技术中,“大于”、“小于”、“超过”等表述理解为不包括本数;“以上”、“以下”、“以内”等表述理解为包括本数。此外,在本技术实施例的描述中“多个”的含义是两个以上(包括两个),与之类似的与“多”相关的表述亦做此类理解,例如“多组”、“多次”等,除非另有明确具体的限定。
65.在本技术实施例的描述中,所使用的与空间相关的表述,诸如“中心”“纵向”“横向”“长度”“宽度”“厚度”“上”“下”“前”“后”“左”“右”“竖直”“水平”“垂直”“顶”“底”“内”“外”“顺时针”“逆时针”“轴向”“径向”“周向”等,所指示的方位或位置关系是基于具体实施例或附图所示的方位或位置关系,仅是为了便于描述本技术的具体实施例或便于读者理解,而不是指示或暗示所指的装置或部件必须具有特定的位置、特定的方位、或以特定的方
位构造或操作,因此不能理解为对本技术实施例的限制。
66.除非另有明确的规定或限定,在本技术实施例的描述中,所使用的“安装”“相连”“连接”“固定”“设置”等用语应做广义理解。例如,所述“连接”可以是固定连接,也可以是可拆卸连接,或成一体设置;其可以是机械连接,也可以是电连接,也可以是通信连接;其可以是直接相连,也可以通过中间媒介间接相连;其可以是两个元件内部的连通或两个元件的相互作用关系。对于本技术所属技术领域的技术人员而言,可以根据具体情况理解上述用语在本技术实施例中的具体含义。
67.请参阅图1,本实施例提供了一种基于机器视觉的洗扫车作业速度自适应控制方法,包括以下步骤:
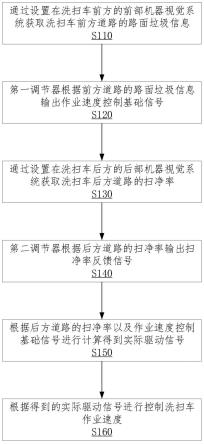
68.步骤s110:通过设置在洗扫车前方的前部机器视觉系统获取洗扫车前方道路的路面垃圾信息;
69.步骤s120:第一调节器根据前方道路的路面垃圾信息输出作业速度控制基础信号;
70.步骤s130:通过设置在洗扫车后方的后部机器视觉系统获取洗扫车后方道路的扫净率;
71.步骤s140:第二调节器根据后方道路的扫净率输出扫净率反馈信号;
72.步骤s150:根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号;
73.步骤s160:根据得到的实际驱动信号进行控制洗扫车作业速度。
74.当洗扫车工作时,通过设置在洗扫车前方的前部机器视觉系统进行获取洗扫车前方道路的路面垃圾信息,路面垃圾信息包括垃圾种类及垃圾数量,第一调节器根据前方道路的路面垃圾信息进行输出作业速度控制基础信号;而通过设置在洗扫车后方的后部机器视觉系统进行获取洗扫车后方道路的扫净率,第二调节器根据后方道路的扫净率进行输出扫净率反馈率;然后根据后方道路的扫净率对作业速度控制基础信号进行计算得到实际驱动信号,然后根据得到的实际驱动信号进行控制洗扫车作业速度。通过提供一种洗扫车自适应扫净率和路面垃圾分布的作业速度控制策略,达到洗扫车的作业速度自适应匹配路面垃圾分布和扫净率,无需驾驶员根据经验进行控制洗扫车作业速度,提高洗扫车作业效率,降低驾驶劳动强度,提高驾驶员安全性和舒适性,减少无效能耗。
75.请参阅图2,在包括以下步骤,还包括以下步骤:
76.步骤s210:通过霍尔传感器获取洗扫车的当前作业速度并转化为作业速度反馈信号;
77.所述步骤“根据后方道路的扫净率调节作业速度控制基础信号得到实际驱动信号”具体包括以下步骤:
78.步骤s220:将作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得到偏差和偏差率;
79.步骤s230:计算得到的偏差及偏差率输入模糊推理调节器输出控制参数;
80.步骤s240:pid控制器根据模糊推理调节器输出的控制参数输出实际驱动信号。
81.通过霍尔传感器进行获取洗扫车的当前作业速度并转化为作业速度反馈信号,在将转化得到的作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得
到偏差和偏差率,输入模糊推理调节器输出控制参数,pid控制器根据模糊推理调节器输出的控制参数进行输出实际驱动信号。可以实时调整pid控制器的控制参数,实现洗扫车作业速度自适应控制。
82.在某些实施例中,所述步骤“计算得到的偏差及偏差率输入模糊推理调节器输出控制参数”具体包括以下步骤:
83.计算得到的偏差及偏差率输入模糊推理调节器;
84.模糊推理调节器根据mandimi算法进行计算得到控制参数,所述控制参数包括比例k
p
、积分ki以及微分kd。
85.将第一调节器、第二调节器与霍尔传感器形成的电流偏差e和电流偏差率ec,作为模糊推理调节器的输入,输出量为控制参数k
p
、ki、kd。将偏差e和偏差率ec模糊子集均设置为:{负大,负小,零,正小,正大},记为:{nb,ns,zo,ps,pb},相应的模糊论域为:{-4,-2,0,2,4}。控制参数k
p
、ki、kd模糊子集均设置为:{零,正小,正中,正大},记为:{ze,ps,pm,pb},对应的模糊论域为(01)。隶属度函数选择三角形隶属度函数。参数自整定公式:
[0086][0087]
公式中k
po
、k
io
、k
do
为pid原始参数;δk
p
(k),δki(k),δkd(k)为模糊推理调节器的输出。当洗扫车作业速度输入控制信号发生变化,模糊推理调节器根据mandimi算法,计算比例(kp)、积分(ki)和微分(kd)3个输出量,通过模糊推理调节器对k
p
、ki和kd的3个参数在线校正与调节。
[0088]
具体的,所述步骤“pid控制器根据模糊推理调节器输出的控制参数输出实际驱动信号”具体包括以下步骤:
[0089]
当收到模糊推理调节器输出的控制参数后,pid控制器根据作业速度控制模型输出实际驱动信号,所述作业速度控制模型为
[0090]
将模糊理论与pid控制结合,进而建立模糊pid洗扫车作业速度控制模型:根据该模型,pid控制输出实际驱动信号uout输入洗扫车的行走控制器,进行控制洗扫车的作业速度。
[0091]
由洗扫车的前部机器视觉系统,测算路面垃圾种类和数量,得到前方道路的路面垃圾信息,通过路面垃圾种类和数量调节器(即第一调节器),输出作业速度控制基础电流rb(即作业速度控制基础信号)。洗扫车后部机器视觉系统,测算扫净率,通过扫净率梯度调节器(第二调节器),输出作业速度控制的扫净率反馈电流rc(即扫净率反馈信号)。uo
ut
为经模糊pid调节器输出的实际驱动电流(即实际驱动信号),yo
ut
为纯电动洗扫车作业行走速度。通过霍尔传感器将作业速度yo
ut
转换为作业速度反馈电流,与基础电流rb和扫净率反馈电流rc形成偏差e和偏差率ec,输入模糊推理调节器,实时调整pid控制器参数,实现洗扫车作业速度自适应控制。
[0092]
模糊pid控制器模糊集、论域和隶属度函数的确定:
[0093]
将垃圾种类和数量调节器(即第一调节器)、扫净率梯度调节器(即第一调节器)与
霍尔传感器形成的电流偏差e和电流偏差率ec,作为模糊推理调节器的输入,输出量为控制参数k
p
、ki、kd。将偏差e和偏差率ec模糊子集均设置为:{负大,负小,零,正小,正大},记为:{nb,ns,zo,ps,pb},相应的模糊论域为:{-4,-2,0,2,4}。控制参数kp,ki,kd模糊子集均设置为:{零,正小,正中,正大},记为:{ze,ps,pm,pb},对应的模糊论域为(01)。隶属度函数选择三角形隶属度函数。参数自整定公式:
[0094][0095]
式中k
po
、k
io
、k
do
为pid原始参数;δk
p
(k),δki(k),δkd(k)为模糊推理调节器的输出。当纯电动洗扫车作业速度输入控制信号发生变化,模糊推理调节器根据mandimi算法,计算比例(k
p)
、积分(ki)和微分(kd)3个输出量,通过模糊推理调节器对k
p
、ki和kd的3个参数在线校正与调节,将模糊理论与pid控制结合,进而建立模糊pid洗扫车作业速度控制系统:
[0096][0097]
根据上述公式,控制信号uout输入纯电动洗扫车行走控制器。
[0098]
请参阅图3,在某些实施例中,所述步骤“根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号”具体包括以下步骤:
[0099]
步骤s310:根据后方道路的当前扫净率与最低扫净率及最优扫净率进行比较,确定当前扫净率所在的扫净率梯度;
[0100]
步骤s320:根据当前扫净率所在的扫净率梯度对应的调节系数对作业速度控制基础信号进行调整得到实际驱动信号。
[0101]
假设当前在线洗扫车扫净率为jc,洗扫车最低扫净率为j
min
,洗扫车最优扫净率为jyou。单位电流梯度为δi,ic为当前路面垃圾种类和数量y对应的洗扫车的作业速度控制基础信号,i
next
为下一时刻输给行走控制器的实际驱动信号,i
max
为洗扫车行走控制器允许的最大驱动信号,则洗扫车扫净率边界条件为
[0102][0103]
上述公式中inext《imax,k1、k2、k3、k4为调整系数,都是大于零的数,且k1》k2》k3;
[0104]
根据后方道路的当前扫净率与最低扫净率及最优扫净率进行比较,确定当前扫净率所在的扫净率梯度;
[0105]
当时,则表示当前扫净率在1梯度,则根据1梯度的调整参数k1,将实际驱动信号调整为i
next
=i
c-k1δi;
[0106]
当时,则表示当前扫净率在2梯度,则根据2梯度的调整参数k2,将实际驱动信号调整为i
next
=i
c-k2δi;
[0107]
当时,则表示当前扫净率在3梯度,则根据3梯度的调整参数k3,将实际驱动信号调整为i
next
=i
c-k3δi;
[0108]
当j
min
《jc≤j
max
时,则表示当前扫净率在4梯度,则不对当前的实际驱动信号进行调整,将当前作业速度控制基础信号ic作为实际驱动信号i
next
;
[0109]
当j
max
《jc≤1时,则表示当前扫净率在5梯度,则根据5梯度的调整参数k4,将实际驱动信号调整为i
next
=ic k4δi;
[0110]
当前洗扫车扫净率处于1、2、3梯度时,其中,1梯度为2梯度为3梯度为因洗扫车速度过快,此时洗扫车扫净率偏低,故需要降低洗扫车作业速度,对作业速度控制基础信号ic根据对应梯度的调整系数进行调节,降低作业速度。
[0111]
当洗扫车扫净率处于第4梯度时,即j
min
《jc≤j
max
,当前扫净率处于允许最低扫净率和洗扫车最优扫净率之间,此时保持洗扫车速度不变,洗扫车按照此速度稳定行驶。
[0112]
当洗扫车扫净率处于第5梯度时,即j
max
《jc≤1,此时洗扫车扫净率优于jyou,提高洗扫车作业速度。
[0113]
洗扫车作业速度调节过程中,如果洗扫车以恒定作业速度作业,洗扫车能耗和作业效率以及作业效果不能达到最优。因此洗扫车作业速度需自适应匹配路面垃圾种类和数量以及扫净率的波动。
[0114]
请参阅图4,在另一实施例中,基于机器视觉的洗扫车作业速度自适应控制系统,应用于洗扫车,其中,洗扫车包括纯电动洗扫车、油电混合动力洗扫车及燃油动力洗扫车,具体的,该控制系统包括;
[0115]
前部机器视觉系统410,所述前部机器视觉系统410设置在洗扫车前方,所述前部机器视觉系统410用于获取洗扫车前方道路的路面垃圾信息;
[0116]
第一调节器420,所述第一调节器420用于根据前方道路的路面垃圾信息输出作业速度控制基础信号;
[0117]
后部机器视觉系统430,所述后部机器视觉系统430设置在洗扫车后方,所述后部机器视觉系统430用于获取洗扫车后方道路的扫净率;
[0118]
第二调节器440,所述第二调节器440用于根据后方道路的扫净率输出扫净率反馈信号;
[0119]
处理模块450,所述处理模块450用于根据后方道路的扫净率以及作业速度控制基础信号进行计算得到实际驱动信号;
[0120]
行走控制器460,所述行走控制器460用于根据得到的实际驱动信号进行控制洗扫车作业速度。
[0121]
当洗扫车工作时,通过设置在洗扫车前方的前部机器视觉系统410进行获取洗扫
车前方道路的路面垃圾信息,路面垃圾信息包括垃圾种类及垃圾数量,第一调节器420根据前方道路的路面垃圾信息进行输出作业速度控制基础信号;而通过设置在洗扫车后方的后部机器视觉系统430进行获取洗扫车后方道路的扫净率,第二调节器440根据后方道路的扫净率进行输出扫净率反馈率;然后根据后方道路的扫净率对作业速度控制基础信号进行计算得到实际驱动信号,然后根据得到的实际驱动信号进行控制洗扫车作业速度。通过提供一种洗扫车自适应扫净率和路面垃圾分布的作业速度控制策略,达到洗扫车的作业速度自适应匹配路面垃圾分布和扫净率,无需驾驶员根据经验进行控制洗扫车作业速度,提高洗扫车作业效率,降低驾驶劳动强度,提高驾驶员安全性和舒适性,减少无效能耗。
[0122]
请参阅图5,在某实施例中,还包括:
[0123]
霍尔传感器470,所述霍尔传感器470用于获取洗扫车的当前作业速度并转化为作业速度反馈信号;
[0124]
所述处理模块450还包括模糊推理调节器451及pid控制器452;
[0125]
所述处理模块450用于将作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得到偏差和偏差率,并输入模糊推理调节器451;
[0126]
所述模糊推理调节器451用于根据计算得到的偏差及偏差率输出控制参数;
[0127]
所述pid控制器452用于根据模糊推理调节器451输出的控制参数输出实际驱动信号。
[0128]
通过霍尔传感器470进行获取洗扫车的当前作业速度并转化为作业速度反馈信号,在将转化得到的作业速度反馈信号与作业速度控制基础信号及扫净率反馈信号进行计算得到偏差和偏差率,输入模糊推理调节器451输出控制参数,pid控制器452根据模糊推理调节器451输出的控制参数进行输出实际驱动信号。可以实时调整pid控制器452的控制参数,实现洗扫车作业速度自适应控制。
[0129]
在某些实施例中,所述模糊推理调节器451用于根据mandimi算法进行计算得到控制参数,所述控制参数包括比例k
p
、积分ki以及微分kd。
[0130]
将第一调节器420、第二调节器440与霍尔传感器470形成的电流偏差e和电流偏差率ec,作为模糊推理调节器451的输入,输出量为控制参数k
p
、ki、kd。将偏差e和偏差率ec模糊子集均设置为:{负大,负小,零,正小,正大},记为:{nb,ns,zo,ps,pb},相应的模糊论域为:{-4,-2,0,2,4}。控制参数k
p
、ki、kd模糊子集均设置为:{零,正小,正中,正大},记为:{ze,ps,pm,pb},对应的模糊论域为(01)。隶属度函数选择三角形隶属度函数。参数自整定公式:
[0131][0132]
公式中k
po
、k
io
、k
do
为pid原始参数;δk
p
(k),δki(k),δkd(k)为模糊推理调节器451的输出。当纯电动洗扫车作业速度输入控制信号发生变化,模糊推理调节器451根据mandimi算法,计算比例(kp)、积分(ki)和微分(kd)3个输出量,通过模糊推理调节器451对k
p
、ki和kd的3个参数在线校正与调节。
[0133]
具体的,所述pid控制器452还用于当收到模糊推理调节器451输出的控制参数后,根据作业速度控制模型输出实际驱动信号,所述作业速度控制模型为
[0134]
将模糊理论与pid控制结合,进而建立模糊pid洗扫车作业速度控制模型:根据该模型,pid控制输出实际驱动信号uout输入洗扫车的行走控制器460,进行控制洗扫车的作业速度。
[0135]
在某些实施例中,所述处理模块450还用于根据后方道路的当前扫净率与最低扫净率及最优扫净率进行比较,确定当前扫净率所在的扫净率梯度;根据当前扫净率所在的扫净率梯度对应的调节系数对作业速度控制基础信号进行调整得到实际驱动信号。
[0136]
假设当前在线洗扫车扫净率为jc,洗扫车最低扫净率为j
min
,洗扫车最优扫净率为jyou。单位电流梯度为δi,ic为当前路面垃圾种类和数量y对应的洗扫车的作业速度控制基础信号,i
next
为下一时刻输给行走控制器460的实际驱动信号,i
max
为洗扫车行走控制器460允许的最大驱动信号,则洗扫车扫净率边界条件为
[0137][0138]
上述公式中inext《imax,k1、k2、k3、k4都是大于零的数,且k1》k2》k3;
[0139]
当时,则表示当前扫净率在1梯度,则根据1梯度的调整参数k1,将实际驱动信号调整为i
next
=i
c-k1δi;
[0140]
当时,则表示当前扫净率在2梯度,则根据2梯度的调整参数k2,将实际驱动信号调整为i
next
=i
c-k2δi;
[0141]
当时,则表示当前扫净率在3梯度,则根据3梯度的调整参数k3,将实际驱动信号调整为i
next
=i
c-k3δi;
[0142]
当j
min
《jc≤j
max
时,则表示当前扫净率在4梯度,则不对当前的实际驱动信号进行调整,将当前作业速度控制基础信号ic作为实际驱动信号i
next
;
[0143]
当j
max
《jc≤1时,则表示当前扫净率在5梯度,则根据5梯度的调整参数k4,将实际驱动信号调整为i
next
=ic k4δi;
[0144]
当前洗扫车扫净率处于1、2、3梯度时,其中,1梯度为2梯度为3梯度为因洗扫车速度过快,此时洗扫车扫净率偏低,故需要降低洗扫车作业速度,对作业速度控制基础信号ic根据对应梯度的调整系数进行调
节,降低作业速度。
[0145]
当洗扫车扫净率处于第4梯度时,即j
min
《jc≤j
max
,当前扫净率处于允许最低扫净率和洗扫车最优扫净率之间,此时保持洗扫车速度不变,洗扫车按照此速度稳定行驶。
[0146]
当洗扫车扫净率处于第5梯度时,即j
max
《jc≤1,此时洗扫车扫净率优于jyou,提高洗扫车作业速度。
[0147]
洗扫车作业速度调节过程中,如果洗扫车以恒定作业速度作业,洗扫车能耗和作业效率以及作业效果不能达到最优。因此洗扫车作业速度需自适应匹配路面垃圾种类和数量以及扫净率的波动。
[0148]
最后需要说明的是,尽管在本技术的说明书文字及附图中已经对上述各实施例进行了描述,但并不能因此限制本技术的专利保护范围。凡是基于本技术的实质理念,利用本技术说明书文字及附图记载的内容所作的等效结构或等效流程替换或修改产生的技术方案,以及直接或间接地将以上实施例的技术方案实施于其他相关的技术领域等,均包括在本技术的专利保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。