1.本发明涉及捻织工厂设备领域,特别是一种内纱导轨升降系统。
背景技术:
2.现有的捻线及织布工厂基本采用人工手动上纱,随着企业规模的扩大,上纱时间长,效率低,劳动强度大,成为各个企业亟需解决的问题。现有技术中有采用带有avg的机器人上纱的方案,例如cn111996627a用于捻线机的自动化上纱系统,但是采用该方案的上纱效率仍然较低。而且控制难度较大,机器人避让操作人员的能力较弱,经常对操作人员的工作造成干扰。也有采用自动落纱和上纱进行的方案,但是该方案落纱后仍需要人工进行上纱,例如cn112011863a一种用于捻线生产的自动落纱系统中记载的方案。每卷工业纱卷装重达10多公斤,每个操作人员每天要完成几百次上纱操作,如何提高上纱的自动化水平,降低操作工人的劳动强度,是一个技术难题。
技术实现要素:
3.本发明所要解决的技术问题是提供一种内纱导轨升降系统,能够降低上纱的劳动强度,提高上纱的效率。
4.为解决上述技术问题,本发明所采用的技术方案是:一种内纱导轨升降系统,包括空中输送轨道,空中输送轨道用于输送车组行走,输送车组用于输送卷装;在空中输送轨道设有内纱轨道升降段,内纱轨道升降段位于捻线机的两侧,当内纱轨道升降段升起时,内纱轨道升降段与空中输送轨道连通,当内纱轨道升降段降下时,内纱轨道升降段靠近捻线机的锭罐的位置。
5.优选的方案中,所述的输送车组由多个互相铰接的输送单元组成,每组输送车组的输送单元与捻线机的锭位相对应。
6.优选的方案中,输送车组的结构为:铰接连杆上设有悬挂轮组,悬挂轮组悬挂在空中输送轨道内,铰接连杆用于将多个输送单元互相铰接连接,铰接连杆的底部与第一车组连接杆连接,第一车组连接杆与四边连接杆机构连接,四边连接杆机构靠近底部的两个连杆之间设有拉簧,四边连接杆机构靠近底部的两个连杆分别与第一挂杆和第二挂杆连接,第一挂杆和第二挂杆的底部设有倒钩;拉簧用于使第一挂杆与第二挂杆趋于张开。
7.优选的方案中,输送车组的结构为:铰接连杆上设有悬挂轮组,悬挂轮组悬挂在空中输送轨道内,铰接连杆用于将多个输送单元互相铰接连接,铰接连杆的底部与第二车组连接杆连接,第二车组连接杆的底部与抱臂连接,抱臂中间设有用于装载内纱卷装的空间,抱臂的底部设有开口。
8.优选的方案中,在捻线机的两侧设有支撑架,内纱轨道升降段与支撑架滑动连接,在支撑架上设有升降装置, 升降装置与内纱轨道升降段连接,用于驱动内纱轨道升降段升降;
所述的升降装置为气缸、液压缸或齿轮齿条驱动机构。
9.优选的方案中,在捻线机的两侧设有支撑架,在支撑架的立柱设有竖直的升降导轨,升降导轨内设有升降滑轮组,升降滑轮组通过连接杆与内纱轨道升降段连接;在支撑架上设有多个可转动的转轴,转轴沿着内纱轨道升降段的方向布置,转轴与驱动装置连接以驱动转轴旋转,在转轴上设有多个卷绕盘,卷绕盘上卷绕有悬挂带,悬挂带的下端与内纱轨道升降段连接,以转轴的旋转驱动内纱轨道升降段升降。
10.优选的方案中,所述的驱动装置为升降驱动电机,升降驱动电机通过传动机构与转轴连接,并驱动转轴旋转;在升降驱动电机、传动机构或与转轴设有转角传感器。
11.优选的方案中,在空中输送轨道与内纱轨道升降段连接的位置,或者在支撑架上与内纱轨道升降段滑动连接的位置设有位置传感器,用于检测内纱轨道升降段是否与空中输送轨道对齐。
12.优选的方案中,在空中输送轨道与内纱轨道升降段连接的位置,在空中输送轨道的端头顶部设有上挡片,两侧设有侧挡片,上挡片和侧挡片均超出空中输送轨道的端头,侧挡片的底部内侧设有斜面,靠近底部的位置厚度较薄,靠近顶部的位置厚度较厚。
13.优选的方案中,在空中输送轨道上设有行走驱动装置,以驱动输送车组行走;在空中输送轨道上设有输送车组传感器,用于检测输送车组的位置以及输送车组搭载的卷装品种;在空中输送轨道上设有分合流道岔,用于切换不同的轨道;在捻线机的两侧底部设有滑移架,锭罐设置在滑移架上,用于使锭罐滑移到捻线机之外上纱。
14.本发明提供了一种内纱导轨升降系统,通过采用输送车组沿空中输送轨道输送卷装的方案,每次一组输送车组输送的卷装能够对应捻线机的每个锭位,大幅提高卷装的输送效率。采用内纱轨道升降段的结构,能使卷装更靠近锭罐,从而大幅降低操作人员的工作劳动强度。在优选的方案中,捻线机的底部设有滑移架,将滑移架和锭罐滑移到捻线机之外,使降下的卷装能够直接落入到锭罐内,进一步降低操作人员的劳动强度。
附图说明
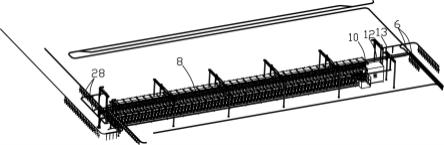
15.下面结合附图和实施例对本发明作进一步说明:图1为本发明的整体结构立体图。
16.图2为本发明的内纱导轨升降系统的结构立体图。
17.图3为图2中a处的局部放大示意图。
18.图4为本发明中输送车组的结构示意图。
19.图5为本发明中输送车组的另一可选结构示意图。
20.图6为本发明中输送车组将卷装直接装入锭罐时的结构示意图。
21.图中:捻线机1,锭位101,内纱导轨升降系统2,支撑架201,转轴202,卷绕盘203,升降驱动电机204,传动机构205,悬挂带206,固定座207,连接杆208,上挡片209,侧挡片210,升降导轨211,升降滑轮组212,位置传感器213,空中输送轨道3,内纱轨道升降段31,锭罐4,输送车组5,第一车组连接杆51,四边连接杆机构52,拉簧53,第一挂杆54,第二挂杆55,悬挂
轮组56,铰接连杆57,抱臂58,第二车组连接杆59,分合流道岔6,登高车7,输送车组传感器8,行走驱动装置9,卷装10,滑移架11。
具体实施方式
22.实施例1:如图1~3中,一种内纱导轨升降系统,包括空中输送轨道3,空中输送轨道3用于输送车组5行走,输送车组5用于输送卷装10;在空中输送轨道3设有内纱轨道升降段31,内纱轨道升降段31位于捻线机1的两侧,当内纱轨道升降段31升起时,内纱轨道升降段31与空中输送轨道3连通,当内纱轨道升降段31降下时,内纱轨道升降段31靠近捻线机1的锭罐4的位置。由此结构,能够将装载了卷装10的输送车组5下降到接近锭罐4的位置,甚至能够如图6中所示,将卷装10直接装入到锭罐4中。
23.优选的方案如图5中,所述的输送车组5由多个互相铰接的输送单元组成,每组输送车组5的输送单元与捻线机1的锭位101相对应。即一次输送即可完成所有锭位101的内纱上纱操作,大幅提高效率。
24.优选的方案如图4中,输送车组5的结构为:铰接连杆57上设有悬挂轮组56,悬挂轮组56悬挂在空中输送轨道3内,铰接连杆57用于将多个输送单元互相铰接连接,铰接连杆57的底部与第一车组连接杆51连接,第一车组连接杆51与四边连接杆机构52连接,四边连接杆机构52靠近底部的两个连杆之间设有拉簧53,四边连接杆机构52靠近底部的两个连杆分别与第一挂杆54和第二挂杆55连接,第一挂杆54和第二挂杆55的底部设有倒钩;拉簧53用于使第一挂杆54与第二挂杆55趋于张开。由此结构,能够将第一挂杆54和第二挂杆55伸入到卷装10的筒管中,从而将筒管勾住,将卷装10固定。而当输送车组5移动到锭罐4上方时,将四边连接杆机构52捏住,使第一挂杆54与第二挂杆55从卷装10的筒管中脱出。卷装10落入到锭罐4内。
25.优选的方案件如图5中,输送车组5的结构为:铰接连杆57上设有悬挂轮组56,悬挂轮组56悬挂在空中输送轨道3内,铰接连杆57用于将多个输送单元互相铰接连接,铰接连杆57的底部与第二车组连接杆59连接,第二车组连接杆59的底部与抱臂58连接,抱臂58中间设有用于装载内纱卷装48的空间,抱臂58的底部设有开口。
26.优选的方案如图1、图2中,在捻线机1的两侧设有支撑架201,内纱轨道升降段31与支撑架201滑动连接,在支撑架201上设有升降装置, 升降装置与内纱轨道升降段31连接,用于驱动内纱轨道升降段31升降;所述的升降装置为气缸、液压缸或齿轮齿条驱动机构。
27.优选的方案如图2、图3中,在捻线机1的两侧设有支撑架201,在支撑架201的立柱设有竖直的升降导轨211,升降导轨211内设有升降滑轮组212,升降滑轮组212通过连接杆208与内纱轨道升降段31连接;在支撑架201上设有多个可转动的转轴202,转轴202沿着内纱轨道升降段31的方向布置,转轴202与驱动装置连接以驱动转轴202旋转,在转轴202上设有多个卷绕盘203,卷绕盘203上卷绕有悬挂带206,悬挂带206的下端与内纱轨道升降段31连接,以转轴202的旋转驱动内纱轨道升降段31升降。
28.优选的方案如图3中,所述的驱动装置为升降驱动电机204,升降驱动电机204通过传动机构205与转轴202连接,并驱动转轴202旋转;在升降驱动电机204、传动机构205或与转轴202设有转角传感器。转角传感器用于检测转轴202的转角,从而便于计算出内纱轨道升降段31的升降行程。
29.优选的方案如图2、图3中,在空中输送轨道3与内纱轨道升降段31连接的位置,或者在支撑架201上与内纱轨道升降段31滑动连接的位置设有位置传感器213,用于检测内纱轨道升降段31是否与空中输送轨道3对齐。位置传感器213采用行程开关,包括机械式行程开关、巨磁阻式行程开关、霍尔开关等。优选的,本例中采用了双控制路线的方案,内纱轨道升降段31升起采用位置传感器213进行闭环控制,以使内纱轨道升降段31与空中输送轨道3精确对齐。而内纱轨道升降段31的下降采用开环控制,由转角传感器进行控制,优选的方案如图3中,在空中输送轨道3与内纱轨道升降段31连接的位置,在空中输送轨道3的端头顶部设有上挡片209,两侧设有侧挡片210,上挡片209和侧挡片210均超出空中输送轨道3的端头,侧挡片210的底部内侧设有斜面,靠近底部的位置厚度较薄,靠近顶部的位置厚度较厚。由此结构,能够辅助内纱轨道升降段31与空中输送轨道3精确对齐。
30.优选的方案如图2中,在空中输送轨道3上设有行走驱动装置9,以驱动输送车组5行走;在空中输送轨道3上设有输送车组传感器8,用于检测输送车组5的位置以及输送车组5搭载的卷装10品种;输送车组传感器8包括行程开关和数据读取器,行程开关包括机械式行程开关、巨磁阻式行程开关、霍尔开关等。数据读取器包括摄像头或电子标签读取器,相应的二维码或电子标签被设置在输送车组5上,用于记载当前输送车组5的id码,在给输送车组5装载卷装10时,即将该id码与卷装10的参数进行绑定。
31.在空中输送轨道3上设有分合流道岔6,用于切换不同的轨道;分合流道岔6根据输送车组传感器8获取的输送车组5装载的卷装10的信息,将输送车组5输送至不同的位置。
32.在捻线机1的两侧底部设有滑移架11,锭罐4设置在滑移架11上,用于使锭罐4滑移到捻线机1之外上纱。
33.实施例2:以最优的方案为例加以说明,使用时,如图1~4、6中,卷装10装载在输送车组5上,由行走驱动装置9驱动输送车组5,经过分合流道岔6分流至捻线机1两侧的内纱轨道升降段31,操作人员控制滑移架11滑出捻线机1的锭位101,滑移架11可以采用手动控制也可以采用自动控制。
34.操作人员控制升降驱动电机204动作,升降驱动电机204通过传动机构205驱动转轴202旋转,本例中的传动机构205为同步带传动机构,为减速机构,减速比为1:3~5,下降的操作优选采用开环控制,精度要求不高。卷绕盘203上的悬挂带206松开,内纱轨道升降段31下降。当卷装10降入到锭罐4内,捏动四边连接杆机构52,使第一挂杆54和第二挂杆55缩回松开卷装10,卷装10落入到锭罐4内,操作人员在登高车7上进行接线操作。升降驱动电机204再次反向转动,卷绕盘203将悬挂带206卷绕,内纱轨道升降段31升起,沿着侧挡片210的导向与空中输送轨道3精确对齐,直至内纱轨道升降段31被位置传感器213检测,升降驱动电机204停止动作。行走驱动装置9动作,驱动输送车组5离开内纱轨道升降段31,从空中输送轨道3至上纱位置再次上纱。为便于观察图1中仅设置了一处行走驱动装置9,其余位置的
行走驱动装置9进行了省略。
35.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本技术中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。