1.本技术涉及料仓的领域,尤其是涉及一种桁架机器人配套用链式料仓。
背景技术:
2.料仓是一种储存物料或工件再向加工设备输送物料或工件的存储设备。
3.相关技术中,在料仓输送工件的过程中,各个工件之间相互抵贴,在工件移动到预设位置时,机械臂抓取工件,以便对工件进行加工。
4.针对上述中的相关技术,发明人认为发现在料仓工作的过程中,相邻两个工件之间的间距较小,在机械臂对工件进行夹取时,易与相邻的工件发生碰撞,降低了机械臂夹取工件的准确度,从而导致了料仓的送料精度交底的缺陷。
技术实现要素:
5.为了提高料仓的送料精度,本技术提供一种桁架机器人配套用链式料仓。
6.本技术提供的一种桁架机器人配套用链式料仓,采用如下的技术方案:
7.一种桁架机器人配套用链式料仓,包括机架和送料台,所述送料台设置在机架上,所述送料台上设有用于输送工件的轨道,所述送料台上设有用于确定相邻两个工件距离的定位组件。
8.通过采用上述技术方案,在料仓使用的工程中,工件沿轨道移动,在工件移动至定位组件处时,定位组件对相邻两个工件的距离进行确定,方便后续机械臂抓取对应位置的工件,提高了机械臂抓取工件的准确度,从而提高了料仓的送料精度。
9.优选的,所述轨道上滑动连接有若干移动座,每个所述移动座上均对应放置有一个工件;
10.所述定位组件包括定位器和相对设置的检测器,所述定位器和相对设置的检测器均设置在送料台上,若干所述移动座上均设有与定位器相配合的定位板,若干所述移动座均经过相对设置的检测器之间。
11.通过采用上述技术方案,操作人员将工件放置在移动座上,再移动移动座,当移动座移动至定位器处时,定位板阻挡定位器的输出端,此时相邻的移动座位于相对设置的检测器之间,实现对相邻两个移动座之间距离的确定,从而实现对相邻两个工件距离的确定,检测器再检测移动座上是否有工件,以便后续机械臂夹取工件,在定位器和检测器的配合下,提高了机械臂夹取工件的准确度,从而提高了料仓的送料精度。
12.优选的,所述移动座靠近送料台的一侧滚动连接有若干滚珠,所述滚珠与送料台相抵触。
13.通过采用上述技术方案,在移动座移动的过程中,滚珠滚动,使得移动座与送料台之间的滑动摩擦变为滚动摩擦,减小了移动座与送料台之间的摩擦力,同时降低了移动座长时间与送料台摩擦而产生损耗的可能性。
14.优选的,所述送料台上设有相对设置的导向板,相对设置的所述导向板设置在导
向环两侧,所述定位器设置在导向板上,相对设置的所述检测器分别设置在导向板两侧。
15.通过采用上述技术方案,驱动组件驱动移动座沿轨道移动,在移动座移动至相对的导向板之间时,移动座与导向板相接触,此时导向板为移动座的位置提供进一步限定,使得移动座的位置更加精准,为后续机械臂抓取工具提供了便利,从而进一步提高了料仓的送料精度。
16.优选的,所述轨道设置为“凹”字型。
17.通过采用上述技术方案,“凹”字型的轨道可以放置更多的移动座,为料仓存放更多的工件提供了便利,减少了操作人员向料仓中增补工件的次数,从而提高了料仓的送料效率。
18.优选的,所述送料台背离移动座的一侧设有驱动组件,所述驱动组件包括驱动电机、驱动齿轮、驱动链和若干从动齿轮,所述驱动电机设置在送料台背离移动座的一侧,所述驱动齿轮同轴固定在驱动电机的输出端上,若干从动齿轮均转动连接在送料台背离移动座的一侧,若干所述从动齿轮分别设置在轨道的拐角处,所述驱动链绕设在驱动齿轮和若干从动齿轮上并与驱动齿轮和若干从动齿轮相啮合,所述驱动链上设有若干连接杆,若干所述移动座上均对应连接杆开设有连接孔,所述连接杆延伸至连接孔中并与连接孔的内壁相抵紧。
19.通过采用上述技术方案,在需要对上料时,操作人员启动驱动电机,驱动电机启动带动驱动齿轮转动,驱动齿轮转动带动驱动链转动,驱动链转动带动从动齿轮转动和连接杆移动,连接杆移动带动移动座移动,为移动座的移动提供了便利。
20.优选的,若干所述移动座上均设有用于固定工件的夹紧结构,所述夹紧结构包括第一转轴、第二转轴和一对夹爪,所述移动座上开设有第一夹紧槽和第二夹紧槽,所述第一转轴转动连接在第一夹紧槽中,所述第二转轴转动连接在第二夹紧槽中,一对所述夹爪分别固定在第一转轴和第二转轴上,所述夹爪与工件相适配;
21.所述移动座上开设有让位槽,所述让位槽中滑动连接有用于放置工件的承接座,所述第一转轴上同轴固定有第一齿轮,所述第二转轴上同轴固定有第二齿轮,所述承接座的两侧均设有齿条,所述让位槽与第一夹紧槽和第二夹紧槽相连通,所述齿条延伸至第一夹紧槽和第二夹紧槽中,所述第一齿轮和第二齿轮均与齿条相啮合。
22.通过采用上述技术方案,在操作人员将工件放置在移动座上时,工件带动承接座朝向让位槽的槽底移动,承接座移动带动齿条朝向让位槽的槽底移动,齿条带动第一齿轮和第二齿轮转动,第一齿轮带动第一转轴转动,第二齿轮带动第二转轴转动,第一转轴和第二转轴转动带动夹爪朝向工件移动,当承接座移动至让位槽的槽底时,夹爪与工件的外壁相抵紧,以完成对工件的固定,使得工件在移动的过程中不易与移动座发生分离,方便后续机械臂在移动座移动至相对的检测器之间时对工件进行抓取,从而提高了料仓的送料精度。
23.优选的,所述导向板上设有用于分离夹爪与工件的拆卸组件,所述拆卸组件包括安装板和第一拆卸板,所述安装板靠近移动座的一侧沿竖直方向开设有拆卸槽,所述第一拆卸板滑动连接在拆卸槽中,所述第一拆卸板与拆卸槽之间设有弹簧,所述第一转轴延伸出移动座并同轴固定有第二拆卸板。
24.通过采用上述技术方案,在移动座移动至安装板处时,第二拆卸板与第一拆卸板
相抵触,第一拆卸板带动第二拆卸板朝向远离安装板的一侧转动,第二拆卸板转动带动第一转轴转动,第一转轴转动带动夹爪朝向远离工件的方向转动,同时第一齿轮转动带动齿条朝向远离让位槽的槽底的方向移动,从而使得承接座朝向远离让位槽的槽底的方向移动,承接座带动工件伸出让位槽,方便机械臂抓取工件,从而提高了料仓的送料效率。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.通过设置定位组件,在料仓工作的过程中,定位组件确定相邻的移动座之间的间距,降低了后续机械臂抓取工件时与相邻移动座上的工件发生碰撞的可能性,方便机械臂抓取对应位置的工件,从而提高了料仓的送料精度;
27.通过设置导向板,在移动座移动至定位组件处时,导向板为移动座的位置提供进一步限位,从而进一步提高了料仓的送料精度;
28.通过设置夹紧结构,在操作人员将工件放置在移动座上时,夹紧结构为工件提供限位,使得工件不易与移动座分离,从而降低了工件在运输的过程中与移动座发生分离的壳可能性。
附图说明
29.图1是本技术实施例一的整体结构示意图;
30.图2是图1中a部的放大结构示意图;
31.图3是本技术实施例一中用于体现驱动组件位置的结构示意图;
32.图4是本技术实施例二的整体结构示意图;
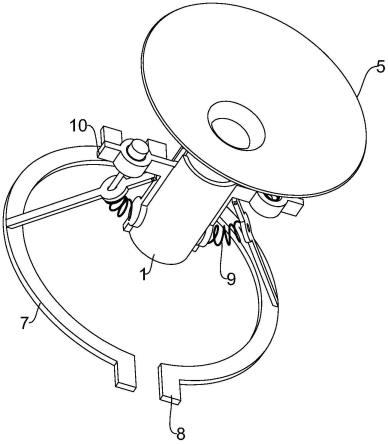
33.图5是图4中b部的放大结构示意图;
34.图6是本技术实施例二用于体现夹持结构与工件位置关系的结构示意图。
35.附图标记说明:1、机架;2、送料台;21、轨道;22、防护格栅;23、导向板;3、定位组件;31、定位器;32、检测器;4、移动座;41、滚珠;42、定位板;43、连接孔;44、第一夹紧槽;45、第二夹紧槽;46、让位槽;47、承接座;471、齿条;5、工件;6、驱动组件;61、驱动电机;62、驱动齿轮;63、从动齿轮;64、驱动链;65、连接杆;7、夹紧结构;71、第一转轴;711、第一齿轮、72、第二转轴;721、第二齿轮;73、夹爪;8、拆卸组件;81、安装板;811、拆卸槽;812、弹簧;82、第一拆卸板;821、第一导向面;83、第二拆卸板;831、第二导向面。
具体实施方式
36.以下结合附图1-6对本技术作进一步详细说明。
37.本技术实施例公开一种桁架机器人配套用链式料仓。参照图1,一种桁架机器人配套用链式料仓,包括机架1和送料台2,送料台2固定在机架1上,送料台2上设置有用于输送工件5的轨道21,送料台2上设有用于确定相邻两个工件5距离的定位组件3,且机架1侧面架设有用于抓取工件5的机械臂。在工件5移动至定位组件3处时,定位组件3对相邻两个工件5之间的距离进行确定,此时机械臂再抓取对应位置的工件5,使得机械臂在抓取工件5时不易与相邻的工件5发生碰撞,提高了机械臂抓取工件5的准确度,从而提高了料仓的送料精度。
38.参照图1和图2,轨道21上滑动连接有若干移动座4,且每个移动座4上均对应放置有一个工件5,移动座4靠近送料台2的一侧滚动连接若干滚珠41,且滚珠41与送料台2相抵
触,滚珠41使得移动座4与送料台2之间的滑动摩擦变为滚动摩擦,降低了移动座4与送料台2之间的摩擦力,从而降低了移动座4与送料台2之间的发生磨损的可能性。
39.参照图1,送料台2上固定有防护格栅22,在料仓工作的过程中,防护格栅22为操作人员提供了保护,降低了工件5与移动座4分离而对操作人员造成伤害的可能性。
40.参照图1,轨道21设置为“凹”字型,“凹”字型的轨道21方便存放更多的移动座4,使得料仓存储更多的工件5,减少了操作人员向料仓中增补工件5的次数,从而提高了料仓的送料效率。
41.参照图2和图3,送料台2背离移动座4的一侧设有驱动组件6,且若干移动座4均与驱动组件6相连接,送料台2上固定有相对设置的导向板23,且相对设置的导向板23固定在轨道21的两侧;若干移动座4均从相对设置的导向板23之间经过,并与相对设置的导向板23相抵触,且定位组件3设置在导向板23处。
42.当料仓工作时,操作人员启动驱动组件6,驱动组件6带动移动座4移动,当移动座4移动至导向板23处时,定位组件3为移动座4的位置提供限位,导向板23为移动座4提供进一步限位,提高了机械臂抓取工件5的准确度,从而提高了料仓的送料精度。
43.参照图2,定位组件3包括定位器31和相对设置的检测器32,定位器31固定在导向板23上,相对设置的检测器32分别设置在相对设置的导向板23两侧,且各个移动座4上均固定有与定位器31相配合的定位板42。
44.在料仓工作的过程中,驱动组件6带动移动座4移动,移动座4移动至定位器31处时,定位板42阻挡定位器31,各个移动座4均停止移动,此时相邻的移动座4位于相对的检测器32之间,以确定相邻两个移动座4之间的间距,降低了机械臂在抓取工件5时与相邻的工件5发生碰撞的可能性;检测器32再对移动座4上的工件5进行检测,在移动座4上有工件5时,机械臂对工件5进行抓取,降低了移动座4上无工件5时机械臂实施抓取动作的可能性,提高了机械臂抓取工件5的准确度,从而进一步提高了料仓的送料精度。
45.参照图2和图3,驱动组件6包括驱动电机61、驱动齿轮62和若干从动齿轮63,驱动电机61固定在送料台2背离移动座4的一侧,驱动齿轮62同轴固定在驱动电机61的输出端上,若干从动齿轮63均转动连接在送料台2背离移动座4的一侧且若干从动齿轮63分别设置在轨道21的拐角处,驱动齿轮62和若干从动齿轮63外侧绕设有驱动链64,且驱动齿轮62与若干从动齿轮63均与驱动链64相啮合;驱动链64上固定有若干连接杆65,各个移动座4上均对应连接杆65开设有连接孔43,且连接杆65均延伸至对应的连接孔43中并与连接孔43的内壁相抵紧。
46.在料仓工作的过程中,操作人员启动驱动电机61,驱动电机61带动驱动齿轮62转动,驱动齿轮62转动带动驱动链64转动,驱动链64转动带动从动齿轮63转动,同时驱动链64带动连接杆65移动,连接杆65移动带动对应的移动座4移动,方便移动座4移动至定位器31处,此时相邻的移动座4位于相对设置的检测器32之间,机械臂再将工件5取出,为料仓送料提供了便利。
47.本技术实施例一的实施原理为:在使用料仓时,操作人员启动驱动组件6,驱动组件6带动移动座4移动,当移动座4移动至定位器31处时,定位板42阻挡定位器31,此时相邻的移动座4位于相对设置的检测器32之间,以确定相邻的移动座4之间的距离,以便后续机械臂较为准确地抓取工件5;同时导向板23为移动座4的位置提供进一步限位,进一步提高
了机械臂抓取工件5的准确度,从而进一步提高了料仓的送料精度。
48.实施例二:
49.参照图4和图5,与实施例一的不同之处在于:若干移动座4上均设有用于固定工件5的夹紧结构7,夹紧结构7包括第一转轴71、第二转轴72和一对夹爪73,移动座4上开设有第一夹紧槽44和第二夹紧槽45,第一转轴71转动连接在第一夹紧槽44中,第二转轴72转动连接在第二夹紧槽45中,一对夹爪73分别固定在第一转轴71和第二转轴72上,且夹爪73与工件5相适配。
50.参照图5和图6,移动座4上开设有让位槽46,让位槽46中滑动连接有用于放置工件5的承接座47,且让位槽46与第一夹紧槽44和第二夹紧槽45相连通,第一转轴71上同轴固定有第一齿轮711,第二转轴72上同轴固定有第二齿轮721,承接座47上固定有齿条471,且齿条471分别延伸至第一夹紧槽44和第二夹紧槽45中并与第一齿轮711和第二齿轮721相啮合。
51.在操作人员将工件5放置在移动座4上时,工件5带动承接座47朝向让位槽46的槽底移动,承接座47带动齿条471朝向让位槽46的槽底移动,齿条471再带动第一齿轮711和第二齿轮721转动,第一齿轮711带动第一转轴71转动,第二齿轮721带动第二转轴72转动,第一转轴71和第二转轴72转动使得夹爪73朝向工件5移动,在承接座47与让位槽46的槽底相抵触时,夹爪73夹持工件5,此时夹爪73为工件5的位置提供限位,使得移动座4在移动的过程中工件5不易与移动座4发生分离,为后续机械臂抓取工件5提供了便利,从而提高了料仓的送料精度。
52.参照图5和图6,导向板23上设有用于分离夹爪73与工件5的拆卸组件8,拆卸组件8包括安装板81和第一拆卸板82,安装板81靠近送料台2的一侧沿竖直方向开设有拆卸槽811,第一拆卸板82滑动连接在拆卸槽811中,且第一拆卸板82与拆卸槽811之间连接有弹簧812,弹簧812为第一拆卸板82提供拉力,使得第一拆卸板82不易全部伸出拆卸槽811;第一转轴71延伸出移动座4并同轴固定有与第一拆卸板82相配合的第二拆卸板83。
53.在移动座4移动至相邻的检测器32的过程中,第二拆卸板83与第一拆卸板82相抵触,第一拆卸板82带动第二拆卸板83朝向远离安装板81的方向转动,此时弹簧812处于压缩状态;第二拆卸板83转动带动第一转轴71转动,第一转轴71转动带动夹爪73朝向远离工件5的方向转动,且第一转轴71转动带动第一齿轮711转动,第一齿轮711转动带动齿条471朝向远离让位槽46的槽底移动,同时承接座47朝向远离让位槽46的槽底的方向移动,承接座47带动工件5伸出让位槽46,为机械手抓取工件5提供了便利,从而方便料仓输送工件5。
54.参照图5和图6,第一拆卸板82上设有第一导向面821,第二拆卸板83上设有与第一导向面821相配合的第二导向面831,当第一拆卸板82与第二拆卸板83相接触时,第一导向面821与第二导向面831相抵触,使得第一拆卸板82带动第二拆卸板83转动,在第一导向面821与第二导向面831接触时,减小了第一拆卸板82与第二拆卸板83相碰撞而发生损坏的可能性,从而延长了第一拆卸板82和第二拆卸板83的使用寿命。
55.本技术实施例二的实施原理为:在操作人员将工件5放置在移动座4上时,工件5带动承接座47朝向让位槽46的槽底移动,承接座47带动齿条471移动,齿条471移动带动第一齿轮711和第二齿轮721转动,第一齿轮711带动第一转轴71转动,第一转轴71带动位于第一转轴71上的夹爪73朝向工件5移动,第二齿轮721带动第二转轴72转动,第二转轴72带动位
于第二转轴72上的夹爪73朝向工件5移动,在承接座47与让位槽46的槽底相抵触时,夹爪73与工件5相抵紧,以加固工件5与移动座4之间的连接,降低了工件5在运输的过程中与移动座4分离的可能性,从而提高了料仓送料的效率。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。