1.本实用新型涉及机械加工领域,尤其涉及一种定位销偏位装置。
背景技术:
2.在机械加工中,通常都需要先将被加工的工件进行定位操作,然后再对工件进行加工处理(如焊接),所述定位操作使得工件可以被稳固可靠的固定在工作台上,方便后续的加工,且定位时通常利用一定位装置与工件上的定位孔配合来实现定位,例如,所述定位装置通过定位销伸入所述工件的定位孔中实现定位。举例来说,弧焊工艺来说,现有的定位装置大部分都是通过双导杆气缸来连接/驱动定位销,从而对工件进行定位,然后由机器人进行焊接。然而,这种定位装置的适用场景较为有限,其气缸暴露在弧焊环境下,与气缸相连的导杆部位也处于不封闭状态,易受到焊渣的污染而影响导杆的伸缩进而影响定位精度,而且工件焊接时容易发生变形,从而易对定位装置内的气缸产生影响,时间长了定位装置的定位精度也会降低,进而对工件加工产生影响,除此之外,现有的双导杆气缸具备较低的径向负荷能力,其结构强度并不理想。
技术实现要素:
3.本实用新型所解决的技术问题在于提供一种定位销偏位装置,以改善现有技术中定位精度不佳的问题。
4.为解决上述技术问题,本实用新型采用如下技术方案:一种定位销偏位装置,包括一气缸及与气缸相连的滑动件,所述工装定位装置还包括位于气缸两侧的一对导轨以及容纳所述气缸和导轨的箱体,所述滑动件设有一凸伸至箱体外的主体及自主体一侧朝向箱体内延伸的一对臂部,所述气缸设有一与所述主体固定连接的伸缩导杆,所述一对臂部直接或间接地固定至所述一对导轨上。
5.进一步地,所述气缸还设有一缸体,所述伸缩导杆介于所述一对臂部之间,且所述伸缩导杆的底端延伸入所述缸体内,顶端与所述主体固定连接。
6.进一步地,所述导轨设有一狭长型轨道及安装于该轨道上的滑块,所述臂部直接或间接地固定连接至所述滑块上。
7.进一步地,所述臂部通过一连接块与所述滑块固定连接,所述连接块夹设于所述臂部和滑块之间且分别与臂部和滑块固定连接。
8.进一步地,所述一对臂部位于所述气缸的两侧,且彼此相互平行设置,所述伸缩导杆的长度延伸方向与所述一对臂部平行。
9.进一步地,所述主体上开设有一操作口、一螺孔以及若干安装孔,所述螺孔位于主体的一侧并与所述伸缩导杆固定连接,所述若干安装孔位于所述主体的另一侧,所述操作口介于所述螺孔和安装孔之间。
10.进一步地,所述主体还设有一朝向所述伸缩导杆的凹口,所述伸缩导杆的顶端凸伸入所述凹口内,所述螺孔暴露于所述操作口内并通过一螺栓或螺丝与所述伸缩导杆的顶
端固定连接。
11.进一步地,所述定位销偏位装置还包括与所述一对臂部对应配合的一对限位块,每一臂部上均设有一限位凹槽,所述限位块凸伸入所述限位凹槽内。
12.进一步地,所述限位块呈t型,其固定于所述箱体上。
13.进一步地,所述箱体设有一顶板、一底板、一对侧板及一对盖板,所述一对导轨分别固定于所述一对侧板的内表面上,所述一对盖板上开设有向内贯通的可视窗口,所述气缸暴露于所述可视窗口内;所述顶板上开设有供所述滑动件穿过的开孔。
14.与现有技术相比,本实用新型的滑动件通过与双轨道的配合,可沿着导轨实现稳定可靠且高精度的直线伸缩运动,且双轨道的结构具有更高的额定负荷能力,能够承受更大的偏心承载力矩,使滑动件具备更稳定、更精准的伸缩移动能力,从而保证安装在滑动件头部的定位销(未图示)也具有更高的定位精度,最终保证了定位销对工件的定位精度。
附图说明
15.图1为本实用新型所述定位销偏位装置去除一侧盖板后的立体图。
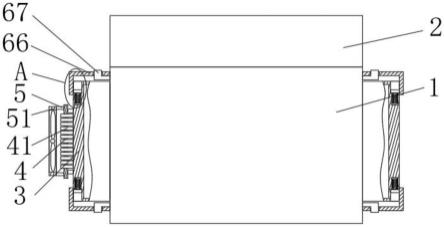
16.图2为本实用新型所述定位销偏位装置的内部剖面视图。
17.图3为本实用新型所述定位销偏位装置的分解图。
18.图4为本实用新型所述定位销偏位装置的限位块与滑动件的臂部的示意图。
具体实施方式
19.请参阅图1至图4所示,本实用新型提供一种定位销偏位装置100,其用于作用在一工件(未图示)上以对所述工件进行固定定位,所述定位销偏位装置100包括一箱体10、收容于箱体10内的气缸20、位于气缸20两侧的一对导轨30、与所述气缸20相连的滑动件40以及连接于所述滑动件40和导轨30之间的连接块50,所述滑动件40受所述气缸20的驱动发生伸缩滑移,以带动一定位销(未图示)朝向工件移动或离开工件,从而实现对工件的偏心定位(偏位)。
20.所述箱体10罩设于所述气缸20、导轨30、滑动件40及连接块50的四周外围,其设有一顶板11、一底板12、一对侧板13及一对盖板14,其中,所述顶板11、底板12、侧板13及盖板14共同围成一收容空间,以容纳所述气缸20、导轨30、滑动件40及连接块50,所述顶板11设有供所述滑动件40穿过的开孔15,所述底板12用于承载所述气缸20。所述箱体10将各个部件围于其内部,可其他很好的防护作用,尤其是能更好的对气缸20进行保护,使其免受焊渣污染,避免因焊渣而影响滑动件40的伸缩精度和顺畅度。另外,为了便于控制所述气缸20,所述一对盖板14中的至少一个盖板14上开设有向内贯通收容空间的可视窗口16,所述可视窗口16与所述气缸20位置相对应以将气缸20暴露在可视窗口16内,可便于安装气缸20的调速阀和磁性开关,所述可视窗口16也可以便于对调速阀和磁性开关的操作。
21.所述气缸20设有一缸体21及自缸体21一端向外凸伸出的伸缩导杆22,所述缸体21固定于所述箱体10的底板12上,所述伸缩导杆22的一端(底端)延伸入所述缸体21内,另一端(顶端)则朝向所述顶板11延伸并与所述滑动件40固定连接,所述缸体21在运行时可驱动所述伸缩导杆22沿长度方向上进行伸缩运动,由伸缩导杆22的顶端驱动所述滑动件40实现同步运动。
22.所述一对导轨30分别位于所述气缸20的左右两侧,用于引导所述滑动件40的移动,且所述导轨30包括一狭长型轨道31及安装于该轨道31上的滑块32,所述轨道31垂直于所述箱体10的底板12和顶板11,且固定于所述箱体10的侧板13上,而所述滑块32则卡持于所述轨道31内并可沿所述轨道31的长度方向进行滑移,且所述滑块32的内侧表面与所述连接块50固定连接,从而使得滑块32的滑移可带动所述连接块50同步滑移。优选地,单个所述轨道31上的滑块32数量为两个,该两个滑块32相互连接并同步实现滑移。
23.所述连接块50呈长条形,其一侧所述滑块32固定连接,其另一侧与所述滑动件40固定连接,所述连接块50夹设于所述滑块32和滑动件40之间,且彼此之间相互固定连接,使得所述滑块32的滑动可带动所述连接块50的同步滑动,由连接块50再带动所述滑动件40同步滑移,如图2所示,所述连接块50将所述滑动件40和滑块32固定在一起,当然,在本实用新型可替代的其他实施例中,所述连接块50也并非必要部件,即所述滑动件40也可以直接与所述滑块32进行固定连接,而无需借助连接块50将两者固定在一起。
24.所述滑动件40设有一主体41及自主体41的延伸出的一对臂部42,其中,所述主体41优选为平板状,其表面开设有若干安装孔43,用于安装所述定位销(未图示),且所述主体41上还设有一方形操作口44及位于方形操作口44一侧的螺孔45,所述螺孔45与所述伸缩导杆22的顶端通过螺丝/螺栓固定连接,从而将伸缩导杆22与滑动件40相固定,且螺孔45与所述方形操作口44贯通设置,而所述方形操作口44的设置主要是为螺丝/螺栓的固定操作提供空间,且方形操作口44介于所述螺孔45与安装孔43之间,另外,所述主体41还设有朝向所述伸缩导杆22的凹口46,用于与所述伸缩导杆22的顶端定位配合。所述一对臂部42位于所述主体41的同一侧,且朝向相同的方向延伸,具体来说,所述一对臂部42自所述主体41朝向所述箱体10的底板12延伸,且所述一对臂部42相互平行设置且彼此对称,两者之间形成一容纳所述伸缩导杆22的缺口,如图2所示,所述一对臂部42分别位于所述气缸20的两侧,且并分别与气缸20两侧的连接块50固定连接,由此可使得滑动件40可随连接块50和滑块32的移动而同步移动。为了有效控制滑动件40的滑移范围,在本实用新型较佳实施例中,参图4所示,每一臂部42上设有一长条形的限位凹槽47,而所述定位销偏位装置100还包括一对限位块60,所述限位块60位于所述臂部42的一侧,其凸伸入所述限位凹槽47内,用于控制臂部42的滑移行程,所述限位块60呈t型,其设有凸伸入所述限位凹槽47内的凸部61,且所述限位块60可以安装在所述气缸20上,也可以安装在箱体10上(如盖板14),或者以其他方式安装在所述臂部42的一侧,对所述滑动件40起到限位的作用。
25.综上所述,本实用新型利用双轨道31与滑动件40的配合,使滑动件40可在伸缩导杆22的驱动下沿着轨道31实现稳定可靠且高精度的直线伸缩运动(运动方向可参图2中箭头f所指方向),且相比于现有技术中双导杆驱动滑动件40的方式,本实用新型的双轨道31结构具有更高的额定负荷能力,能够承受更大的偏心承载力矩,使滑动件40具备更稳定、更精准的伸缩移动能力,从而保证安装在滑动件40上的定位销(未图示)也具有更高的定位精度。而且,由于气缸20和伸缩导杆22受到箱体10的防护,使定位销偏位装置100不易受到焊接环境的影响,能进一步的保障其运行的精度。
26.以上所述,仅是本实用新型的最佳实施例而已,并非对本实用新型作任何形式上的限制,任何熟悉本领域的技术人员,在不脱离本实用新型技术方案范围情况下,利用上述揭示的方法内容对本实用新型技术方案做出许多可能的变动和修饰,均属于权利要求书保
护的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。