1.本实用新型属于智能仓储技术领域,具体的为一种复合机器人和智能存储系统。
背景技术:
2.传统的仓储管理需要人工登记,取放物品,不能够做到对物品的精准定位和追溯,不利于人员对物品的管理。另外,现有的复合机器人一般将机械臂直接安装在移动机构上,取放物品全都依靠夹爪实现,在利用复合机器人转移物品的过程中,物品始终被夹持再夹爪上,虽然在一定程度上能够满足使用要求,但在移动过程中,容易存在抖动等不稳定情况,甚至会导致物品掉落。
技术实现要素:
3.有鉴于此,本实用新型的目的在于提供一种复合机器人和智能存储系统,所述的复合机器人能够在转移过程中使被转移物品更加稳定。
4.为达到上述目的,本实用新型提供如下技术方案:
5.本实用新型首先提出了一种复合机器人,包括行走机构,所述行走机构上安装有机身,所述机身上安装有机械臂;
6.所述机身内设有用于存放料盒的至少一个临存库位,所述机械臂上设有用于将所述料盒存放到所述临存库位内或将存放在所述临存库位内的所述料盒取走的夹爪机构。
7.进一步,所述夹爪机构包括相对设置的两个夹爪,两个所述夹爪之间设有用于检测有无所述料盒的第一光电传感器。
8.进一步,所述行走机构上安装有激光雷达;
9.所述夹爪机构上安装有相机;
10.所述机身上设有触摸显示屏和无线通讯天线;
11.所述临存库位内设有用于检测是否存放有所述料盒的第二光电传感器。
12.本实用新型还提出了一种智能存储系统,包括存储区,所述存储区内设有货架和行走通道,所述行走通道内设有如上所述的复合机器人,所述货架上设有用于存放所述料盒的存储库位。
13.进一步,所述夹爪机构上安装有相机,所述货架上设有定位标签,所述相机对所述定位标签拍照以定位所述复合机器人与所述货架之间的相对位置。
14.进一步,所述行走机构上安装有激光雷达,所述货架的底部设有与所述激光雷达等高的定位档杆。
15.进一步,所述存储区的四周设有围栏。
16.进一步,所述存储区内设有充电桩,所述充电桩设置在所述行走通道靠近所述围栏的位置区域;
17.所述行走机构上安装有激光雷达,所述充电桩上设有用于接入外电源的电源接口、用于对所述复合机器人充电的充电接口和用于与所述激光雷达配合的反光板,所述行
走机构上设有与所述充电接口配合的充电插头;
18.所述充电桩上还设有用于控制充电模式的充电模式开关。
19.进一步,还包括交互区,所述交互区与所述行走通道之间设有交互工作台,所述交互工作台上设有至少一个用于放置所述料盒的交互工位。
20.进一步,所述存储区的四周设有围栏;位于所述交互区与所述存储区之间的所述围栏上设有交互窗口,所述交互工作台安装在所述交互窗口所在的位置处;
21.所述机身上设有无线通讯天线;所述交互区内设有通过所述无线通讯天线与所述复合机器人之间实现远程控制的智能一体机。
22.本实用新型的有益效果在于:
23.本实用新型的复合机器人,通过在机身内设置临存库位,利用夹爪机构能够将料盒存放在临存库位内,即在转移过程中,料盒暂存在临存库位内,避免在转移过程中料盒始终被夹持在夹爪机构上,使被转移物品在转移过程中更加稳定;夹爪机构仅需与规格相同的料盒匹配即可,不需要根据物品的不同进行更换,能够满足不同品种的物品的转移要求。
24.本实用新型还具有以下技术效果:
25.(1)通过在夹爪机构上设置相机,在存储库位内设置定位标签,利用相机对定位标签拍照,能够准确定位该存储库位内的料盒的位置,避免夹爪机构在取出或放入料盒的过程与料盒或存储库位内部结构之间产生干涉碰撞;
26.(2)通过在行走机构上设置激光雷达和在货架上设置定位档杆,使定位档杆与激光雷达等高,防止复合机器人与货架之间产生碰撞干涉;
27.(3)通过在行走机构上设置激光雷达和在充电桩上设置反光板,反光板用于辅助行走机构的激光雷达扫描定位,使设置在行走机构上的充电插头能够准确与充电接口定位配合,以实现充电;
28.(4)通过设置交互区,并在交互区与行走通道之间设置交互工作台,可实现外面与存储区内的物品交互。
附图说明
29.为了使本实用新型的目的、技术方案和有益效果更加清楚,本实用新型提供如下附图进行说明:
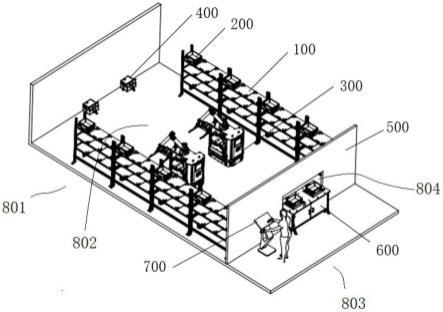
30.图1为本实用新型智能存储系统实施例的结构示意图;
31.图2为货架结构示意图;
32.图3为料盒结构示意图;
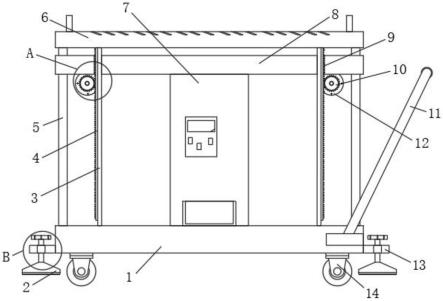
33.图4为复合机器人结构示意图;
34.图5为充电桩结构示意图;
35.图6为对接工作台结构示意图。
36.附图标记说明:
37.100-货架、101-型材架、102-定位档杆、103-定位标签、104-定位角块、105-存储库位、200-料盒、201-夹持耳、202-周转箱、300-复合机器人、301-行走机构、302-机身、303-机械臂、304-夹爪、305-相机、306-第一光电传感器、307-触摸显示屏、308-无线通讯天线、309-临存库位、400-充电桩、401-电压显示、402-充电模式开关、403-电源接口、404-充电接
口、405-反光板、500-围栏、600-对接工作台、601-工作台机架、602-交互工位、700-智能一体机、801-存储区、802-行走通道;803-交互区;804-交互窗口。
具体实施方式
38.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好的理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
39.如图1所示,为本实用新型智能存储系统实施例的结构示意图。本实施例的智能存储系统,包括存储区801和交互区803。本实施例的存储区801内设有货架100、行走通道802和充电桩400,行走通道802内设有复合机器人300,货架100上存放有料盒200,充电桩400设置在行走通道802靠近围栏500的位置区域。货架100按照一定的方式布置在存储区801内,并在货架100之间形成行走通道802,以为复合机器人300行走预留空间。存储区801的四周还设有围栏500,用于人机隔离,本实施例的围栏500采用透明材质制成,如采用玻璃制成,不仅起到人机隔离的作用,还便于从外部观察存储区801内的运行情况。本实施例的交互区803与行走通道802之间设有交互工作台600,在交互区803内还设有用于用户操作并与复合机器人300之间实现远程控制的智能一体机700。智能一体机内安装有人机交互软件和mes系统,可以实现登入、借用、归还、续期、查询等功能。具体的,位于交互区803与存储区801之间的围栏500上设有交互窗口804,交互工作台600安装在交互窗口804所在的位置处。具体的,行走通道802内设置的复合机器人300为至少一个,本实施例的复合机器人300设为2个,当然,根据使用场景的要求,复合机器人300的数量还可以设为3个及3个以上,不再累述。充电桩400的数量也可以根据需要设置,本实施例的充电桩400与复合机器人300对应设有2个。
40.如图2所示,货架100上设有用于存放料盒200的存储库位105,具体的,本实施例中,每个货架100内设有9个存储库位105,9个存储库位105呈3行3列等间距分布。具体的,货架100包括采用型材架101制成,在每个存储库位105内还设有用于定位料盒200的定位角块104,本实施例的定位角块104分布在料盒库位的四个角落。在货架100的底部设有定位档杆102,定位档杆102与设置在复合机器人300上的激光雷达等高,用于小车301扫描定位自身位置,防止复合机器人300与货架100之间产生碰撞干涉。为了精确定位料盒200的位置,本实施例在货架100上设有定位标签103,定位标签103帖在每一列库位的最上方库位上,如此,设置在复合机器人300上的相机可对定位标签103拍照,以定位复合机器人300与存储库位105之间的相对位置,便于将料盒200放入到对应的存储库位105内,或从对应的存储库位105内取出料盒200。
41.如图3所示,本实施例的料盒200包括周转箱202,周转箱202的两侧分别设有夹持耳201,夹持耳201用于与设置在复合机器人300上的夹爪机构配合。
42.如图4所示,本实施例的复合机器人包括行走机构301,行走机构301上安装有机身302,机身302上安装有机械臂303。机身302内设有用于存放料盒200的至少一个临存库位309,本实施例的临存库位309设为两个。机械臂303上设有用于将料盒200存放到临存库位309内或将存放在临存库位309内的料盒200取走的夹爪机构。
43.本实施例的夹爪机构包括相对设置的两个夹爪304,两个夹爪304之间设有用于检测有无料盒200的第一光电传感器306,临存库位309内设有用于检测是否存放有料盒200的
第二光电传感器。
44.本实施例的夹爪机构上安装有相机305,相机305用于与设置在货架100上的定位标签103配合,具体的,相机305对定位标签103拍照以定位复合机器人与货架100之间的相对位置。
45.本实施例的行走机构上安装有激光雷达(图中未示出),激光雷达与设置在货架100上的定位档杆102配合,防止复合机器人300与货架100之间产生碰撞干涉。激光雷达还与设置在充电桩400上的反光板405配合,反光板405用于辅助行走机构的激光雷达扫描定位,使设置在行走机构上的充电插头能够准确与充电接口定位配合,以实现充电。
46.本实施例的机身302上设有触摸显示屏307和无线通讯天线308;触摸显示屏307用于显示行走机构的控制软件、cac控制软件、机械臂控制软件等,无线通讯天线308用于联系内网,与安装在智能一体机700内的mes系统通讯。
47.如图5所示,充电桩400上设有电压显示401、用于控制充电模式的充电模式开关402、用于接入外电源的电源接口403、用于对复合机器人300充电的充电接口404和用于与激光雷达配合的反光板405。电压显示401用于显示充电桩400的电压与电流。充电模式开关402可以切换充电模式,如切换强制充电模式与自动充电模式等。电源接口403接入外部220v电压,充电接口404接入设置在行走机构上的充电插头。反光板405用于辅助复合机器人300的激光扫描定位。
48.如图6所示,对接工作台600包括工作台机架601,工作台机构601上设置有交互工位602,交互工位602用于放置料盒200。当然,在本实施例的优选方案中,还可以在交互工位602内设置定位角块104和定位标签103。定位角块104分布在交互工位602的四个角上,用于限位料盒200。定位标签103用于相机305拍照辅助定位。本实施例在工作台机架601上设有两个交互工位602,分别为第一工位和第二工位,第一工位用于借用工具时,复合机器人300从货架100搬运带有工具的料盒200放置在此工位,用户拿走工具;第二工位用于归还工具时,复合机器人300从货架100搬运空料盒200放置在此工位,用户归还工具。
49.本实施例的智能存储系统的运行方式如下:
50.当取用物品时,用户登陆人机交互软件,通过智能一体机700选择需要取用的物品,同时生成订单;mes系统通过远程控制将任务分配给cac控制系统,判断临时库位309内是否存放有料盒200,若是,则将料盒200放置到对应的存储库位105内后,再利用cac控制系统控制复合机器人300运行到物品所在的货架100前方站点;若否,则直接利用cac控制系统控制复合机器人300运行到物品所在的货架100前方站点;而后,将存放有对应物品的料盒200取出并放入到临存库位309内后,使复合机器人300运行到交互工作台600,将存放在临时库位309内的料盒200取出并放置到第一工位内;待用户确认取走物品后,复合机器人300从第一工位上将空的料盒200取走并归还到货架100的空位上。
51.当归还物品时,用户登陆人机交互软件,通过智能一体机700选择需要归还的订单,mes系统通过远程控制将任务分配给cac控制系统,判断临时库位309内是否存放有料盒200,若是,则将料盒200放置到对应的存储库位105内后,再利用cac控制系统控制控制复合机器人300运行到存放有空的料盒200的货架100前方站点;若否,则直接利用cac控制系统控制控制复合机器人300运行到存放有空的料盒200的货架100前方站点;而后,取出空的料盒200放置在临存库位309内,在驱动复合机器人300运行到交互工作台600,将存放在临时
库位309内的空的料盒200取出并放置到第二工位内;待用户确认归还物品后,复合机器人300从第二工位上将盒200取走并放置到货架100的空位上。
52.以上所述实施例仅是为充分说明本实用新型而所举的较佳的实施例,本实用新型的保护范围不限于此。本技术领域的技术人员在本实用新型基础上所作的等同替代或变换,均在本实用新型的保护范围之内。本实用新型的保护范围以权利要求书为准。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。