1.本发明有关于移动方向判断系统以及物体体积计算系统,特别有关于使用光学资料的移动方向判断系统以及物体体积计算系统。
背景技术:
2.近年来,光学式触控装置越来越流行。然而,传统的光学式触控装置仅具有2d方式的触控感应功能,而无法在3d环境中侦测物体。此外,由于传统光学式触控装置的结构,传统光学式触控装置的应用通常受限在使用手指或触控笔。
3.此外,无人店铺近年来也越来越流行。但是,这种无人店铺通常没有安全的产品确认机制。顾客可以使用条码阅读器扫描便宜的产品,但将昂贵的产品放入购物车,以更低的价格获得昂贵的商品。
4.因此,需要用在解决上述问题的新系统。
技术实现要素:
5.本发明一目的为公开一种移动方向判断系统,其可判断物体的移动方向且可运用在多种场合。
6.本发明另一目的为公开一种物体体积计算系统,其可计算物体的体积,以协助产品确认。
7.本发明一实施例公开了一种移动方向判断系统,包括:第一侦测区,包括:第一光学感测器,用以感测第一光学资料;第二侦测区,包括:第二光学感测器,用以感测第二光学资料;以及处理电路,用以在物体的一部分移动进该第一侦测区以及该第二侦测区后,或是在该物体的一部分通过该第一侦测区以及该第二侦测区后,根据该第一光学资料以及该第二光学资料判断该物体的移动方向。
8.本发明另一实施例公开了一种移动方向判断系统,包括:侦测区,包括:第一反光条;以及光学感测器,用以感测根据来自该第一反光条的反射光而产生的光学资料,其中该光学资料包括对应该第一反光条的第一部分,也包括第二部分以及第三部分,其中该第二部分以及该第三部分位于该第一部分的不同侧;以及处理电路,用以根据该光学资料中的物体光学资料与该第一部分、该第二部分、该第三部分的关系判断物体的移动方向。
9.本发明又一实施例公开了一种物体体积计算系统,用以在物体穿过侦测区时,计算该物体的体积,包括:处理电路;物体感测装置,用以感测该物体的第一光学资料,该物体感测装置根据该第一光学资料产生代表该物体的面积的资讯;以及物体移动感测器,用以计算移动资讯,该移动资讯对应该物体通过该侦测区的动作;其中该处理电路更依据该第一光学资料计算该物体以及该物体移动感测器的距离,根据该距离以及该移动资讯计算该物体的高度,并根据该高度以及该面积取得该体积。
10.根据上述实施例,公开了一种移动方向判断系统,可以判断物体的移动方向或物体的入射角。这种移动方向判断系统的配置方式可以自由改变,因此可运用在各种场景。此
外,本发明公开的物体体积计算系统可用在无人商店,以加强产品确认机制,避免现有无人商店中以高价商品取代低价商品的问题。
附图说明
11.图1绘示了根据本发明一实施例的光学装置的方块图。
12.图2绘示了根据本发明一实施例的移动方向判断系统的示意图。
13.图3绘示了根据本发明一实施例的,如何判断使用者移动方向的示意图。
14.图4绘示了根据本发明另一实施例的移动方向判断系统的示意图。
15.图5、图6a以及图6b绘示了本发明所公开的移动方向判断系统其他运用的示意图。
16.图7、图8、图9以及图10绘示了根据本发明不同实施例的移动方向判断系统的示意图。
17.图11绘示了计算使用者的一位置的例子的示意图。
18.图12a以及图12b绘示了计算使用者的一体积的例子的示意图。
19.图13绘示了根据本发明一实施例的物体体积计算系统的示意图。
20.图14绘示了根据本发明一实施例的,如何计算物体宽度的示意图。
21.其中,附图标记说明如下:
22.100 光学装置
23.101 光学感测器
24.103 光源
25.200,400 移动方向判断系统
26.500 飞镖系统
27.501 镖靶
28.700,1000 光学资料
29.1100 物体体积计算系统
30.br 尺寸资讯读取器
31.cl1、cl2、cl3 重心线
32.cra1、cra2 截面积
33.d1、d2 距离
34.da 飞镖
35.dr1 第一侦测区
36.dr2 第二侦测区
37.f1 第一框
38.f2 第二框
39.l 光
40.od1第一光学装置、od2第二光学装置、第三光学装置od3
41.oda、odb、odc、odd、ode、odf 光学装置
42.om 物体移动感测器
43.os1、os2 物体感测装置
44.p1第一部分、p2第二部分、p3第三部分
45.r2、r3 区域
46.nv法向量、md移动方向
47.po1、po2 位置、ps处理电路
48.st1第一反光条、sti2第二反光条、sti3第三反光条
49.sta、stb 反光条
50.u使用者、ui使用者光学资料
51.θ 夹角
52.θ1、θ2 角度
53.w1、w2 宽度
54.vl1、vl2 体积
具体实施方式
55.以下将以多个实施例来描述本发明的内容,还请留意,各实施例中的元件可通过硬体(例如装置或电路)或是韧体(例如微处理器中写入至少一程式)来实施。此外,以下描述中的“第一”、“第二”以及类似描述仅用来定义不同的元件、参数、资料、信号或步骤。并非用以限定其次序。举例来说,第一装置和第二装置可为具有相同结构但为不同的装置。
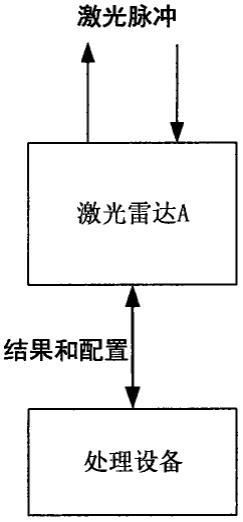
56.图1绘示了根据本发明一实施例的光学装置的方块图。如图1所示,光学装置100包括光学感测器101和光源103。光源103用以向外发射光l。此外,光学感测器101用以感测根据从光源103发射的光的反射光产生的光学资料。在一实施例中,光学感测器101是影像感测器并且光学资料是至少一个影像。然而,光学资料也可以是包括例如光强度或光分布之类的光学特征的资料。
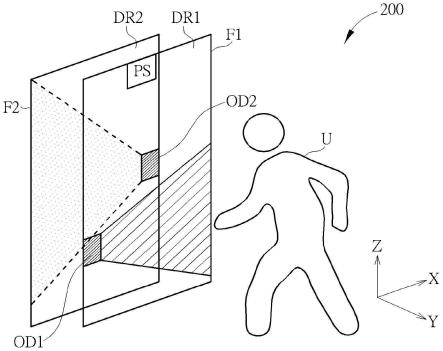
57.图2绘示了根据本发明一实施例的移动方向判断系统的示意图。如图2所示,移动方向判断系统200包括第一侦测区dr1和第二侦测区dr2。第一侦测区dr1包括第一光学装置od1。此外,第二侦测区dr2包括第二光学装置od2。因此,当使用者u的至少一部分位在第一侦测区dr1时,第一光学装置od1可以光学方式侦测使用者u。例如,第一光学感测器od1所感测的第一光学资料变亮,因此可以与第一光学装置od1和第二光学装置od2沟通的移动方向判断系统200的处理电路ps可根据第一光学资料判断使用者u的至少一部分在第一侦测区dr1内。还请留意,此处及以下实施例中提到的处理电路可以是独立于第一光学装置od1和第二光学装置od2的电路或晶片。然而,处理电路也可以整合在第一光学装置od1或第二光学装置od2中。
58.上述“光学方式侦测”对应不同的实施例可以有不同的含义。如果第一光学装置od1或第二光学装置od2具有图1所示的结构,即其中设置至少一个光源,则“光学方式侦测”可以是指使用者反射来自光源的光,因此,如果反射光的光强度增加,则可以光学方式侦测到使用者。
59.在另一实施例中,光源可与光学感测器相对。通过这种方式,光学感测器直接感测包括来自光源的光的光学资料。在这种情况下,当使用者u位在侦测区时,使用者u会阻挡来自光源的光。因此,如果来自光源的光的光强度降低,则可通过光学方式侦测到使用者。
60.在又一实施例中,光学装置不具有光源而且也没有设置与光学装置相对的光源。在这种情况下,会在光学装置的对面设置反光条,当使用者走过侦测区时,使用者会阻挡从
反光条反射的环境光。
61.因此,遵循相同的规则,移动方向判断系统200的处理电路可以基于光学方式侦测来判断使用者u的至少一部分处在第二侦测区dr2中。
62.在一实施例中,第一侦测区dr1和第二侦测区dr2会遵循一些特定的规则。更详细来说,第一侦测区dr1和第二侦测区dr2沿x轴的空间(或称为长度)大于沿y轴的空间。举例来说,沿x轴的空间是沿y轴的空间的5-1000倍。此外,沿着z轴的空间表示第一侦测区dr1和第二侦测区dr2的高度。x轴、y轴和z轴相互垂直,如图2所示。第一侦测区dr1和第二侦测区dr2是指分别从第一光学装置od1和第二光学装置od2沿x轴看入的区域。换句话说,使用者u的移动是沿y轴的移动。
63.在判断使用者u的至少一部分位在第一侦测区dr1和第二侦测区dr2之后,处理电路可以判断使用者u的移动方向。图3为示了根据本发明一实施例的,如何判断使用者移动方向的示意图。如图3所示,高逻辑准位表示在侦测区侦测到使用者u。因此,如果使用者u首先在第一侦测区dr1中被侦测到,然后在第二侦测区dr2中被侦测到,则表示使用者u的移动方向是从第一侦测区dr1到第二侦测区dr2。反之,如果使用者u先在第二侦测区dr2中被侦测到,然后在第一侦测区dr1中被侦测到,则表示使用者u的移动方向是从第二侦测区dr2到第一侦测区dr1。
64.因此,根据前述描述,当使用者u的至少一部分移动到第一侦测区dr和第二侦测区dr21后,或者在使用者u的至少一部分通过第一侦测区dr1和第二侦测区dr2后,处理电路可以根据光学侦测结果判断使用者u的移动方向。使用者u可以被任何其他物体替换,稍后将对其进行详细描述。
65.在一实施例中,第一光学装置od1位在第一框f1,而第二光学装置od2位在第二框f2。第一框f1和第二框f2形成使用者可以通过的闸门。在一实施例中,闸门可以是第一空间和第二空间之间的门。例如,门可以是购物中心和购物中心外的道路之间的门。再例如,闸门可以是建筑物中的房间和走廊之间的门。第一框f1和第二框f2可以是真正的框,例如金属框或塑胶框。此外,第一框f1和第二框f2可以是固定物体(例如,墙壁)的不同部分,而不是真正的框。
66.在一实施例中,第一框f1和第二框f2之间的距离小于第一框f1和第二框f2沿x轴的宽度。例如,沿x轴的宽度是第一框f1和第二框f2之间的距离的5-1000倍。此处的距离可以与第一框f1和第二框f2沿y轴的宽度相同或不同。
67.除了移动方向之外,处理电路还可以根据第一光学资料和第二光学资料计算物体的速度。更详细来说,处理电路会记录在第一侦测区dr1中侦测到使用者u的时间以及在第二侦测区dr2中侦测到使用者u的时间。如果第一侦测区dr1和第二侦测区dr2间的距离为已知,则可以根据纪录的时间和已知距离计算出使用者u的速度。
68.光学装置的数量和配置方式不限在图2所示的实施例。图4绘示了根据本发明另一实施例的移动方向判断系统的示意图。如图4所示,移动方向判断系统400中的第一侦测区dr1包括第一光学装置od1,移动方向判断系统400中的第二侦测区dr2包括第二光学装置od2、第三光学装置od3。另外,图4中的第二光学装置od2具有与图2中的第二光学装置od2不同的侦测区,其通过点来标记。在一实施例中,第二光学装置od2与第三光学装置od3的侦测区重叠。通过这种方式,可以计算出物体坐标或物体面积。稍后将更详细地描述物体坐标和
物体区域的计算。在一实施例中,图4中的不同光学装置可具有不同的视角或不同的视域。进一步来说,在另一实施例中,移动方向判断系统400中的第二侦测区dr2包括三个光学装置。因此,可以根据不同的需求来设置光学装置的数量和配置方式。
69.如上所述,使用者u可以被任何其他物体替换。例如,可在工厂中使用前述的移动方向判断系统,且使用者u被工厂制造的产品替代。此外,在这样的例子中,可配置穿过第一区域dr1和第二区域dr2的输送带。输送带可以设置在两个房间之间。因此,通过本发明公开的移动方向判断系统,可以判断产品的移动方向,也可以根据移动方向累计不同房间的产品数量。在另一实施例中,移动方向判断系统可应用在停车场。在这种情况下,移动方向判断系统可用在判断汽车是进入停车场还是离开停车场。
70.本发明的移动方向判断系统还可有其他的应用,例如娱乐系统。图5、图6a以及图6b绘示了本发明所公开的移动方向判断系统其他运用的示意图。在图5和图6a、图6b所示的实施例中,娱乐系统是飞镖系统。另外,在图5、图6a和图6b的实施例中,除了飞镖的移动方向之外,移动方向判断系统还可以用以计算飞镖射出的位置。
71.如图5所示,飞镖系统500包括镖靶501和移动方向判断系统。移动方向判断系统位在镖靶501的前方,包括第一侦测区dr1和第二侦测区dr2。第一侦测区dr1包括光学装置oda、odb和odc。此外,第二侦测区dr2包括光学装置odd、ode和odf。因此可以按照上述步骤计算飞镖射向镖靶501的移动方向。
72.此外,如图6a的实施例所示,因为飞镖在穿过第一侦测区dr1时会阻挡光或反射光,因此可以通过光学装置oda、odb和odc感测到的光学资料得到飞镖穿过第一侦测区dr1的位置po1。飞镖位置po1可通过多种方法计算而得,例如通过三角定位。按照同样的规则,可以通过光学装置odd、ode和odf感测到的光学资料得到飞镖穿过第二侦测区dr2的位置po2。得到位置po1和po2后,就可以得到飞镖对镖靶501的入射角。然后,可以根据入射角预测飞镖射向镖靶501的接触点。
73.更详细来说,在一实施例中,第一侦测区dr1和第二侦测区dr2分别包括至少三个光学装置。在这种情况下,可以准确计算出飞镖在不同侦测区的位置,从而可以根据位置计算出入射角。在一实施例中,入射角是指飞镖的移动方向与镖靶501前表面的法向量之间的最小夹角。图6b为图5与图6a组合的侧视图,这是入射角的一个例子。如图6b所示,飞镖da具有移动方向md。法向量nv与移动方向md之间的夹角θ代表上述入射角,可通过第一侦测区dr1和第二侦测区dr2中的飞镖da的位置计算而得。
74.图5、图6a和图6b中公开的概念不限于用于娱乐系统。例如,飞镖系统500的概念可以使用在诸如射箭系统的训练系统中。更详细来说,图5、图6a和图6b所示的移动方向判断系统可以看作是入射角判断系统或入射点预测系统。
75.由于使用者u可以被其他物体代替,因此本发明公开的移动方向判断系统还可以包括物体识别感测器,用于识别物体。物体识别采用以下至少一种技术来得到物体的识别资讯:nfc(near field communication,近距离无线通讯)技术、光学资料识别技术、条码读取技术。例如,识别资讯可以是产品的编号、制造日期或制造成分。
76.在上述图2和图4的实施例中,是使用两个侦测区来判断使用者u的移动方向,但是在一实施例中,可以仅通过一个侦测区来判断移动方向。图7、图8、图9以及图10绘示了根据本发明不同实施例的移动方向判断系统的示意图。如图7所示,移动方向判断系统包括侦测
区drx,侦测区drx包括光学装置odx和第一反光条st1。光学装置odx可以包括图1所示的结构。因此,光学装置odx中的光源用以发射光。此外,光学装置odx中的光学感测器用以感测根据光的反射光产生的光学资料700(在这例中为影像)。光学资料700包括对应于第一反光条st1的第一部分p1、还包括第二部分p2和第三部分p3。第二部分p2与第三部分p3位于第一部分p1的不同侧,分别对应第一反光条st1附近的区域r2与r3。
77.还请留意,在图7、图8、图9和图10所示的实施例中,为了便于说明,光学资料700旋转了90度,因此区域r2和r3分别位在第一反光条st1的左侧区域和右侧区域,但第二部分p2和第三部分p3分别位在第一部分p1的上方和下方。移动方向判断系统的处理电路根据光学资料700中的使用者光学资料与第一部分p1、第二部分p2、第三部分p3的关系,判断使用者u的移动方向。
78.请参考图8,其中光学资料700包括使用者光学资料ui。如图8所示,从上到下,使用者光学资料ui首先出现在第二部分p2,然后移动到第一部分p1,再移动到第三部分p3。因此,图7中使用者u的移动方向为区域r2
→
第一反光条st1
→
区域r3。在图9中,使用者光学资料ui首先出现在第三部分p3,然后移动到第一部分p1,然后移动到第二部分p2。因此,图7中使用u的移动方向为区域r3
→
第一反光条st1
→
区域r2。
79.在一实施例中,第二部分p2对应第二反光条,第三部分p3对应第三反光条。更详细来说,图7中的区域r2包括第二反光条,图7中的区域r3包括第三反光条。因此,光学装置odx中的光学感测器所感测的光学资料1000包括对应于第二反光条sti2的光学资料和对应于第三反光条sti3的光学资料。通过第二反光条sti2和第三反光条sti3,可以更容易地侦测到使用者u的移动。
80.在一实施例中,光学装置odx设置在前述的框,这代表光学装置odx中的光源和光学资料光学感测器也设置在框。框形成使用者u可以通过的闸门。第二部分p2对应于闸门的第一侧(即区域r2),而第三部分p3对应于闸门的第二侧(即区域r3)。此外,闸门可以是第一空间和第二空间之间的门。第一空间和第二空间的例子已详述于前述说明,为简洁起见,在此不再赘述。
81.还请留意,区域r2、r3、第一反光条st1、第一部分p1、第二部分p2以及第二反光条sti2、第三反光条sti3的形状、尺寸或配置方式。不限在图7、图8、图9和图10所示的实施例。
82.图7、图8、图9、图10实施例中的使用者u也可以替换为其他物体。相对应的,移动方向判断系统还可以包括物体识别感测器,用以识别物体。物体识别可采用以下至少一种技术来得到物体的识别资讯:nfc技术、光学资料识别技术、条码读取技术。例如,标识可以是产品的编号、制造日期或制造成分。
83.除了移动方向,上述移动方向判断系统还可以计算使用者u的速度。在一实施例中,第一侦测区dr1和第二侦测区dr2分别设置在第一框f1上以及图2和图4所示的第二框f2。在这种情况下,可根据在第一侦测区dr1中侦测到使用者u的时间与在第二侦测区dr2中侦测到使用者u的时间之间的时间差以及第一框f1和第二框f2之间的距离计算速度。
84.在另一实施例中,不同于第一光学装置od1和第二光学装置od2的物体移动感测器可以设置在第一框f1和第二框f2其中之一上。物体移动感测器用以计算对应于使用者u通过侦测区的动作的移动资讯。可以根据这样的移动资讯和使用者u与物体移动感测器之间的距离来计算出使用者u的速度。
85.更详细来说,物体移动感测器是可以侦测物体的位置和轨迹的装置。在一实施例中,物体移动感测器包括用以发射光的光源,并且基于光生成的影像(例如图框)来计算物体的位置和轨迹。因此,如果物体移动感测器侦测到使用者u出现在其侦测区,并且侦测区的面积是已知的,物体移动感测器可以得到使用者u的虚拟速度。虚拟速度即使用者在影像中的速度。在一实施例中,物体移动感测器om具有预设的图框率(frame rate),可根据图框率得到使用者u通过侦测区的时间。例如,物体移动感测器每秒撷取100图框,而使用者u出现在20图框中,物体移动感测器可以得到使用者u通过侦测区的时间为20/100秒。从而可以根据侦测区的面积(尺寸)和使用者u通过侦测区的时间来计算虚拟速度。然后,处理电路根据使用者u与物体移动感测器之间的距离,以及虚拟速度计算出使用者的真实速度。在一实施例中,物体移动感测器是通过前述的光流法计算实际速度,但不限于此。
86.使用者u和物体移动感测器之间的距离可以通过各种方法得到。在一实施例中,距离可由接近感测器(proximity sensor)或tof(飞时测距,time of f1ight)装置之类的现有距离测量装置得到。在另一实施例中,使用者u和物体移动感测器之间的距离是根据设置在一个框上的至少三个光学装置感测到的影像来计算的。如图11所示,在一框上设置了三个光学装置,并且可以根据物体装置撷取的影像得到三个重心线cl1、cl2和cl3。在这种情况下,可以基于重心线cl1、cl2和cl3计算使用者u的位置。这种位置计算算法也可以应用在图5、图6a和图6b所示的实施例中。
87.在得到使用者u的速度之后,还可以计算出使用者的体积。在一实施例中,可以根据使用者u的速度和使用者u的截面积来计算体积。图12a以及图12b绘示了计算使用者的一体积的例子的示意图。还请留意,图12a的实施例中使用了两个光学装置od1、od2,但仅用在说明,也可通过仅一个光学装置得到体积。如图12a所示,可以根据光学装置od1和od2所拍摄的影像分别得到代表使用者u的截面面积的角度θ1,θ2。此外,可以通过上述距离测量装置分别得到光学装置od1与使用者u之间以及光学装置od2与使用者u之间的距离d1和d2。
88.请参考图12b,角度θ1代表截面积cra1,角度θ2代表截面积cra2。由于获得了距离d1和d2,因此截面积cra1和截面积cra2的面积可以转换为实际值。
89.在这种情况下,如果得到宽度w1和w2,则可以得到体积vl1和体积vl2。宽度w1和w2可以根据使用者u的速度计算而得。在一实施例中,宽度与速度成正比。例如,如果在一张影像中得到截面积cra1并且使用者u的速度较慢,则根据光学装置od1的速度和图框率可得到较小的宽度w1。又例如,如果在一张影像中得到截面积cra2,且使用者u的速度较快,则根据光学装置od2的速度和图框率可得到较大的宽度w1。
90.因此,在图12a和图12b的实施例中,使用者u在得到截面积cra1和得到截面积cra2时具有不同的速度,使得宽度w1、w2不同.然后,可以根据截面积cra1和宽度w1计算体积vl1,并根据截面积cra2和宽度w2计算体积vl2。依据这些步骤,如果得到多个截面积并得到对应的宽度,就可以计算出使用者u的体积。得到的截面积和对应的宽度越多,得到的使用者u的体积就越准确。
91.本发明还公开了一种物体体积计算系统。图13绘示了根据本发明一实施例的物体体积计算系统的示意图。在图13的实施例中,设置在购物车中、用在计算物体ob通过侦测区时的体积的物体体积计算系统1100包括至少一个物体感测装置(本实施例中为两个物体感测装置os1和os2)、物体移动感测器om和处理电路ps,处理电路ps可以与物体感测装置os1、
os2和物体移动感测器om沟通。还请留意,物体体积计算系统可以设置在购物车以外的任何容器,例如购物篮或盒子。此外,处理电路可以是独立于物体感测装置os1、os2和物体移动感测器om的电路或晶片,也可以整合在其上。
92.物体感测装置os1、os2用以感测物体ob的第一光学资料。物体感测装置os1、os2根据第一光学资料产生代表物体ob的面积的资讯。物体移动感测器om用以计算对应于物体ob穿过侦测区的移动资讯。此外,处理电路还根据第一光学资料计算物体ob与光学移动感测器om之间的距离,根据距离和移动资讯计算物体ob的高度,并根据面积和高度得到体积。
93.更详细来说,物体移动感测器om是可以感测物体的位置和轨迹的装置。在一实施例中,物体移动感测器om包括用以发射光的光源,并且根据基于光产生的图框来计算物体的位置和轨迹。因此,如果物体移动感测器om侦测到物体ob出现在其侦测区并且侦测区的面积是已知的,则物体移动感测器om可以得到物体ob的速度。在一实施例中,物体移动感测器om具有预设的图框率,且可根据图框率得到物体ob通过侦测区的时间。例如,如果物体移动感测器om每秒撷取100图框且物体ob出现在20图框中,则物体移动感测器om可以得到物体ob通过侦测区的时间为20/100秒。然后,处理电路根据物体ob通过侦测区的速度和时间计算高度。在一实施例中,物体移动感测器om是通过光流法计算速度,但不限于此。
94.物体感测装置os1、os2可以包括图1所示的结构。因此,在图13的实施例中,物体体积计算系统1100还包括反光条sta和stb以辅助物体感测装置os1、os2的物体感测。然而,光源可以设置在光学感测器的相对处而不是在同一侧,如图2的实施例所示。可以应用多种方法来通过物体感测装置os1、os2根据第一光学资料产生代表物体ob的面积的资讯。
95.在一实施例中,物体感测装置在不同的视角侦测物体的多个宽度,且处理电路根据这多个宽度计算面积。图14为绘示了根据本发明一实施例的,如何计算物体宽度的示意图。如图14所示,物体感测装置os1、os2在不同视角(即,不同透视方向、不同角度范围)感测物体ob的光学资料。因此,可以根据物体ob的光学资料得到多个宽度。在一实施例中,处理电路根据多个宽度中的最大一个或多个宽度的平均值来计算面积。
96.在另一实施例中,处理电路将宽度分类为多组宽度,并根据这些多组宽度计算不同视角的多个面积。例如,在图14的实施例中,宽度分为两组:物体感测装置os1得到的宽度和物体感测装置os2得到的宽度。然后,处理电路根据物体感测装置os1得到的宽度计算面积,并根据物体感测装置os2得到的宽度计算面积。可以根据这些面积计算最终面积。例如,最终面积可以是这些面积的平均值,或者这些面积中的最大值/最小值。
97.如前所述,处理电路可根据第一光学资料计算物体ob和光学移动感测器om之间的距离。在一实施例中,第一光学资料包括光学移动感测器om的光学资料和物体ob的光学资料,处理电路根据光学移动感测器om的光学资料和物体ob的光学资料计算距离。例如,光学移动感测器om与物体感测装置os1之间的距离是已知的,而物体感测装置os1所感测的第一光学资料包括光学移动感测器om的光学资料和物体ob的光学资料。处理电路可计算物体ob的光学资料的重心,并根据重心和光学移动感测器om的光学资料计算物体ob和光学移动感测器om之间的距离。然而,图14中提到的距离不限在通过这些步骤来计算。
98.此外,物体感测装置os1、os2和光学移动感测器om的数量或配置方式不限在图13所示的实施例。例如,物体感测装置os1、os2的数量和位置可以根据不同的需求而改变。在一实施例中,物体感测装置位在和其所设置的容器的中央点具有最大距离的位置处。此外,
在另一实施例中,物体感测装置位在容器的角落处。
99.请再次参考图13,在一实施例中,物体体积计算系统还包括尺寸资讯读取器br,用于读取产品的产品尺寸资讯。处理电路进一步将上述步骤中得到的对应体积的尺寸资讯与产品尺寸资讯进行比较,以确定使用者放入的物体是否为产品。请注意,这里所说的“将尺寸资讯与产品尺寸资讯进行比较”的步骤,可以是将产品的整体体积与计算出的体积进行比较,也可以是比较产品的宽度、长度和高度中的至少两个和上述实施例中计算出的宽度、长度和高度中的至少两个。
100.在一实施例中,产品尺寸资讯与产品价格一起包括在产品的资讯中,且尺寸资讯读取器br是条码读取器。因此,如果无人商店的使用者想要购买产品,则需要扫描产品上的条码并支付条码中包括的价格,否则无法取走产品然后离开无人商店。在这种情况下,也会得到产品尺寸资讯,并与上述实施例中得到的尺寸资讯进行比较。如果产品尺寸资讯与计算出的尺寸资讯的差值小于预定等级,则可能意味着使用者真的拿着他扫描的产品进行了支付。相反的,如果产品尺寸资讯与计算出的尺寸资讯的差值大于预定等级,则可能意味着使用者拿了另一个产品来伪装成他扫描的产品。
101.根据上述实施例,公开了一种移动方向判断系统,可以判断物体的移动方向或物体的入射角。这种移动方向判断系统的配置方式可以自由改变,因此可运用在各种场景。此外,本发明公开的物体体积计算系统可用在无人商店,以加强产品确认机制,避免现有无人商店中以高价商品取代低价商品的问题。
102.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。