1.本发明属于基于脉冲的环境探测领域,具体涉及一种多个激光测距雷达组成的环境探测系统。
背景技术:
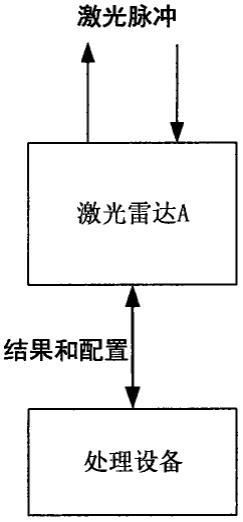
2.激光测距雷达属于脉冲式距离测量设备,广泛用于环境探测。图1为单激光雷达组成的探测系统示意图,测距时,激光雷达内部激光管输出发射激光脉冲,此激光脉冲以光速直线传播出去,遇到物体时反射回来,称为反射激光脉冲,此反射激光脉冲由内部传感器感知,实现光电转换。由激光雷达测量发射激光脉冲与反射激光脉冲之间的时间差,并根据激光在空气中传输速度可以计算出周围物体与激光雷达的距离。有的激光测距雷达安装在可以360
°
旋转的基座上,实现360
°
扫描测距。
3.多个激光测距雷达在同一个系统中进行环境探测可以得到更多的测量结果,可以得到多个不同方位的动态环境距离信息。图2为单激光雷达组成的探测系统示意图,激光测距雷达a和激光测距雷达b独立工作,都将各自的测距结果不断送给处理设备。
4.如果能将多个激光测距雷达相互同步,多个激光测距雷达输出测量结果就更有意义,比如可实现严格同频测量、同节拍测量、避免测量脉冲的相互影响、固定测量时间偏差的结果可修正性等。
技术实现要素:
5.针对现有技术中存在的可提高空间,本发明提一种多个激光测距雷达组成的环境探测系统,其继承了多个激光测距雷达的优点,同时进一步实现了严格同频测量、同节拍测量、避免测量脉冲的相互影响、固定测量时间偏差的结果误差可修正性等。
6.为达到以上目的,本发明采用的技术方案是:
7.一种多个激光测距雷达组成的环境探测系统,其特征是:所述系统包括至少2个激光测距雷达。多个激光测距雷达之间具有同步信号连接关系。系统中一个设备作为主设备来输出有规则的同步信号,接收这个同步信号的激光测距雷达作为从设备。从设备的测距节奏与这个同步信号保持时间同步关系。
8.其中一个激光雷达作为主设备,所述主设备通过内部定时计数器和配置的测量频率,实现周期性的激光测距,在配置的激光测距时刻输出周期性同步信号。
9.所述从设备通过内部定时计数器和配置的测量频率,实现周期性的激光测距。所述从设备内部定时计数器与从所述主设备接收的同步信号保持时间同步关系。
10.进一步,所述从设备激光测距发生时刻与其内部定时计数器零点时刻的时间偏差可以配置,不同从设备可以配置不同的时间偏差。
11.优选的,所述主设备和所述从设备在两个同步信号之时间差内实施多次等时间间隔测距。
12.所述主设备和所述从设备针对两个同步信号之时间差内实施多次等时间间隔测
距的每个结果按顺序编号,这个编号与测距结果同时输出。
13.再进一步,所述环境探测系统还具有处理设备,所述处理设备接收本系统所有激光测距雷达的测距结果,也包括与测距结果对应的顺序编号,来自不同激光雷达中相同顺序编号的结果属于同一个测距节拍。
14.所述处理设备配置本系统所有激光测距雷达的工作参数,包括测距周期和时间偏差,为了避免相互影响,设置相同的测距周期,但每个激光雷达的时间偏差被设置为互不相等的值。
15.所述处理设备根据配置的不同时间偏差对同一节拍内的多个结果进行误差纠正。
16.可选的,所述处理设备作为主设备输出同步信号,所有激光测距雷达作为从设备接收同步信号。
附图说明
17.图1为单激光雷达组成的探测系统示意图;
18.图2为多激光雷达组成的探测系统示意图;
19.图3为多激光测距雷达第一种同步连接示意图;
20.图4为多激光测距雷达之间同步测距节拍示意图;
21.图5为多激光测距雷达第二种同步连接示意图;
具体实施方式
22.下面结合附图,对本发明的具体实施方式作进一步详细的描述。
23.实施例一:
24.参见图3所示的多激光测距雷达第一种同步连接示意图,包2个激光测距雷达、1个处理设备,2个激光测距雷达分别称为激光测距雷达a和激光测距雷达b。
25.激光测距雷达a和激光测距雷达b之间有同步信号连接,激光测距雷达a作为主设备输出有规律的同步信号,这个同步信号与其测距脉冲发送时刻有着确定的同步关系。激光测距雷达b作为从设备接收同步信号,从设备激光测距雷达b的测距脉冲发送时刻与这个同步信号保持确定的同步关系。
26.具有同步信号连接关系的多个设备之间如何实现精确同步,现有技术中有多种实现方案。同一系统内的,1pps脉冲方案是较常用的方式,1pps中每个脉冲的上升沿是一个整秒,再配合其它通信方式告知年月日时分秒,就可以得到准确时间。本系统中激光测距雷达a和激光测距雷达b不需要准确的时间值,只要秒脉冲的边沿能对齐就可以了,因此可以进一步简化为一个同步脉冲信号。
27.为了更清晰描述同步信号与测距脉冲发送时刻有着确定的同步关系,图4为多激光测距雷达之间同步测距节拍示意图。图4中激光测距雷达a根据内部定时计数器和配置的测量频率,实现周期性的激光测距,在配置的激光测距时刻周期性输出同步信号,如图中激光测距雷达a每5个激光测距时刻输出一个同步信号,这5个激光测距时刻分别顺序编号为0、1、2、3、4。同步信号开始时刻与编号为0激光测距时刻对齐,没有偏差。图4中激光测距雷达b根据内部定时计数器和配置的测量频率,实现周期性的激光测距。激光测距雷达b作为从设备,接收来自激光测距雷达a的同步信号,根据这个同步信号对内部定时计数器进行实
时同频、同相计数,也在两个同步信号脉冲之间等间隔进行5次激光测距,这5个激光测距时刻也分别顺序编号为0、1、2、3、4。根据配置的时间偏差,输入的同步信号开始时刻与编号为0激光测距时刻为配置的时间偏差dt。
28.综上所述,本实施例中激光测距雷达a和激光测距雷达b之间有同步信号连接,实现了2个雷达严格同频测距,进一步,通过在从设备配置合理的时间偏差dt,避免了一个或多个从设备之间、从设备与主设备之间的测距激光脉冲重叠冲突。再进一步,两个同步信号脉冲之间多次测距时刻进行顺序编号,把测距结果和对应编号同时提供处理设备。这样即使因为通信路径带宽或收发时延影响,测距结果达到处理设备的时间点会有较大抖动,但是只要根据顺序编号,就能将相同编号的多个测距结果归纳为同一个测距节拍,再结合给各个从设备配置的不同时间偏差dt,消除了不严格同频测距、时间偏差不可知等因素,可以更精确的融合多个激光测距雷达的测距结果。
29.确定时间偏差dt带来的误差是可以消除的。比如一移动物体按固定速度先后通过激光测距雷达a和激光测距雷达b,激光测距雷达a和激光测距雷达b在某个时间差先后感知的该移动物体的出现,这个时间差不仅与激光测距雷达a和激光测距雷达b之间的距离以及物体的移动速度有关,还与激光测距雷达b配置的时间偏差dt有关。只要这个时间偏差dt是固定的,通过简单计算就可以纠正。
30.实施例二:
31.为了适应不同的应用环境,在前述实施例的基础上适当调整,图5为多激光测距雷达第二种同步连接示意图。本实施例中处理设备作为主设备输出同步信号,所有激光测距雷达作为从设备接收同步信号。处理设备也配置了所有激光测距雷达的内部定时计数器、测量频率、时间偏差。优选的,一般配置所有激光测距雷达的内部定时计数器、测量频率为相同数值,给每个激光测距雷达配不同的时间偏差,这样既保证同频、同节拍测距,又有精确的时间偏差来保证不会相互干扰,而且时间偏差带来的误差可以纠正。
32.综上所述,本实施例中的处理设备作为主设备和配置管理设备,这样的系统中处理设备作为主设备不仅可以连接激光测量雷达,也可以连接其它环境探测传感器,可以应用到更复杂的系统中。
33.本发明提供的适用于多激光测距雷达组成的环境探测系统并不限于上述具体实施方式,本领域技术人员根据本发明的技术方案得出其他的实施方式,同样属于本发明的技术创新范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。