1.本实用新型涉及船舶设计领域,特别是涉及一种大距离登离船系统。
背景技术:
2.目前,人员登离船的常见形式主要有两种:一种是船舶干舷很小的船舶,这类船舶登离船的时候一般使用的是跳板;另一种就是目前最广泛使用的引航梯、舷梯或组合梯(引航梯与舷梯组合使用)。但是,上述的两种形式的登离船受到天气的约束,在天气情况允许的情况下和船岸极度有限的距离内完成登离船。
3.随着我国造船事业的发展以及满足各类船舶建造的需要,舷梯的设计制造技术得到了很大的提高,能够满足大型散货船、液化气船以及大型集装箱船的使用要求。但随着经济全球化,航运事业繁荣发展,一艘船有时需要运载货物到达世界各个国家和地区。这就对船舶的码头兼容性提出了非常高的要求,例如巴拿马运河规范第10条规定:所有船,在天气许可的情况下,舷梯和引水员梯都要能达到轻载水线。同时,码头不兼容导致航运货物不能在最合适的港口进行货物卸载,会增加很大的运输成本。现阶段的软梯或舷梯只能单纯固定或悬挂在船舷的两侧或单侧,并不能更好地满足上述要求。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种大距离登离船系统,用于解决现有技术中软梯或舷梯不能兼容不同码头及船岸距离极度有限的问题。
5.为实现上述目的及其他相关目的,本实用新型提供一种大距离登离船系统,所述大距离登离船系统至少包括:
6.梯形单元,所述梯形单元包括梯形固定模块及梯形模块,所述梯形固定模块固定在主甲板上,所述梯形固定模块顶部与所述梯形模块形成可旋转连接,且所述梯形固定模块能够在所述梯形模块的带动下进行翻转;
7.传动单元,所述传动单元包括旋转吊臂及传动模块,所述旋转吊臂固定于主甲板上且能够在船身法线方向上进行旋转,所述旋转吊臂上设置有导轨与吊臂滑轮组,所述传动模块与所述吊臂滑轮组固定连接,能带动所述吊臂滑轮组沿所述导轨进行滑行;
8.固定收放单元,所述固定收放单元包括固定立柱、绞车,所述固定立柱对应于所述旋转吊臂固定在主甲板上,所述固定立柱上设置有立柱滑轮组,所述绞车上缠绕有牵引绳,所述牵引绳绕经所述立柱滑轮组与所述吊臂滑轮组连接所述梯形模块,通过放松或收紧所述牵引绳以放下或收起所述旋转吊臂及所述梯形模块。
9.优选地,所述绞车为电动绞车,所述传动模块包括电动驱动与滑动机构。
10.优选地,所述大距离登离船系统还包括控制单元,所述控制单元与所述电动绞车及所述传动模块电通信。
11.优选地,所述旋转吊臂上设置有微动开关、接近开关中的一种或组合,所述微动开关和/或所述接近开关与所述传动模块电连接以控制所述传动模块在设定位置自动停止。
12.优选地,所述电动绞车还设有手摇装置,所述传动模块还设有手动伸缩装置。
13.优选地,所述传动单元还包括吊臂支撑梁,所述吊臂支撑梁对应于所述旋转吊臂固定在船舷内侧主甲板上。
14.优选地,滑轮组包括配套设置的所述立柱滑轮组、所述吊臂滑轮组,所述滑轮组的数量为n,其中,n≥2。
15.优选地,所述吊臂滑轮组与所述梯形模块之间还设置有节能平稳装置。
16.优选地,所述梯形模块包括梯架、扶手、栏杆及安全保护结构,所述梯架顶部平台与所述梯形固定模块顶部轴向可旋转连接。
17.优选地,所述梯形模块末端设置有橡胶块,以增大所述梯形模块与对接平台的摩擦力。
18.如上所述,本实用新型的一种大距离登离船系统,具有以下有益效果:所述大距离登离船系统至少包括梯形固定模块与梯形模块组成的梯形单元、旋转吊臂及传动模块组成的传动单元及固定立柱及绞车组成的固定收放单元,所述梯形固定模块不仅作为人员登离船时的上下平台,还作为所述梯形模块的支撑点,以使所述梯形模块在复杂海况下依然能够平稳翻转及能供人员平稳攀登;通过所述传动模块沿所述旋转吊臂滑行带动所述梯形模块沿船长方向旋转,以在垂直水面方向上到达与不同码头、平台或船舶合适的相对位置,然后在所述固定收放单元的操作下平稳对接,从而所述大距离登离船系统能够兼容不同码头、平台或船舶,提高船舶的利用率及经济效益;在不使用时,所述固定收放单元能够收起所述旋转吊臂及所述梯形模块,不影响航行的同时还提高所述大距离登离船系统的使用寿命;所述大距离登离船系统结构简单,易于安装,适用于各种船舶。
19.进一步地,所述大距离登离船系统还包括控制单元,减轻人员的操作难度,提高所述大距离登离船系统的工作效率;设置手摇装置及手动伸缩装置,避免动力源失效导致系统损坏、甚至是造成人员伤亡;于所述吊臂滑轮组与所述梯形模块之间设置节能平稳装置,减少牵引绳受力及减缓所述牵引绳的收放速度,维持整个系统的节能及平稳运行,保证运行安全。
附图说明
20.图1显示为本实用新型实施例中一种大距离登离船系统收紧状态示意图。
21.图2显示为本实用新型实施例中一种大距离登离船系统工作状态示意图。
22.图3显示为本实用新型实施例中一种大距离登离船系统工作状态俯视图。
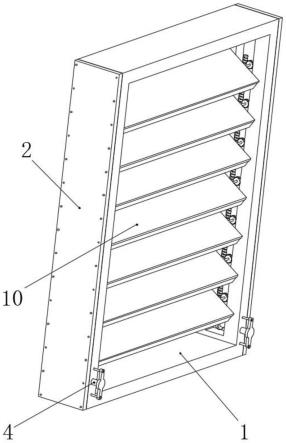
23.图4显示为本实用新型实施例中一种大距离登离船系统透视图。
24.元件标号说明
25.110
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
梯形模块
26.111
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
梯架滑轮组
27.120
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
梯形固定模块
28.121
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
翻转处
29.122
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
连接轴
30.210
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
旋转吊臂
31.211
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
眼板
32.212
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
吊臂支撑梁
33.213
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
吊臂滑轮组
34.220
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传动模块
35.310
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
固定立柱
36.311
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
立柱滑轮组
37.320
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
牵引绳
38.400
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
控制单元
39.500
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
船舷
40.600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
主甲板
41.700
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
节能平稳装置
具体实施方式
42.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
43.请参阅图1-图4。需要说明的是,本实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。
44.如图1-图4所示,本实用新型提供一种大距离登离船系统,所述大距离登离船系统至少包括:
45.梯形单元,所述梯形单元包括梯形固定模块120及梯形模块110,所述梯形固定模块120固定在主甲板600上,所述梯形固定模块120顶部与所述梯形模块110形成可旋转连接,且所述梯形固定模块120能够在所述梯形模块110的带动下进行翻转;
46.传动单元,所述传动单元包括旋转吊臂210及传动模块220,所述旋转吊臂210固定于主甲板600上且能够在船身法线方向上进行旋转,所述旋转吊臂210上设置有导轨(未示出)与吊臂滑轮组213,所述传动模块220与所述吊臂滑轮组213固定连接,能带动所述吊臂滑轮组213沿所述导轨进行滑行;
47.固定收放单元,所述固定收放单元包括固定立柱310、绞车(未示出),所述固定立柱310对应于所述旋转吊臂210固定在主甲板600上,所述固定立柱310上设置有立柱滑轮组311,所述绞车上缠绕有牵引绳320,所述牵引绳320绕经所述立柱滑轮组311与所述吊臂滑轮组213连接所述梯形模块110,通过放松或收紧所述牵引绳320以放下或收起所述旋转吊臂210及所述梯形模块110。
48.具体的,所述梯形固定模块120为固定所述梯形模块110的平台,其固定于船舷500内侧的主甲板600上,为固定在其顶部的所述梯形模块110提供支撑,从而减小海风等对所述梯形模块110的影响,使所述梯形模块110即使面临复杂的海况依然保持平稳。同时所述梯形固定模块120也作为人员登离船舶时的上下平台,因此所述梯形固定模块120可以设置台阶及防护栏杆等,以方便人员登陆并提供必要的防护,这里不对所述梯形固定模块120的
具体大小形状等做过度限制,具体根据实际需求进行设置。
49.所述梯形模块110包含供人员登离船舶的梯架、扶手、栏杆,优选地,所述梯形模块110还包含梯边防护板等安全保护结构或装置,任何满足要求的舷梯或其他梯形装置都可以作为本实用新型的所述梯形模块110。为了兼容不同码头,扩大对应船舶的使用范围,所述梯形模块110根据船舶运营的航线及码头兼容情况设计相应需要的长度。所述梯形模块110的顶部与所述梯形固定模块120的顶部形成可旋转连接,从而使所述梯形模块110能在船长方向上进行旋转,以实现与不同码头、平台或船舶合适位置进行平稳对接,提高船舶的利用率及经济效益。在本实施例的一个具体实施方式中,所述梯形固定模块120顶部靠近船舷500端设置有带螺纹的连接轴122,所述梯形模块110顶部平台对应设置有连接孔,所述连接孔穿过所述连接轴122后用螺母进行固定,从而完成所述梯形模块110与所述梯形固定模块120之间的轴向可旋转连接。上述实施方式为一种非限制性示例,不用于限制本实用新型,也可以采用其他方式实现所述梯形模块110与所述梯形固定模块120之间的可旋转连接。
50.进一步地,完成登离船操作后,为了保护所述梯形模块110提高所述大距离登离船系统的使用寿命,也为了不影响航行,所述梯形模块110带动所述梯形固定模块120进行翻转以方便收起固定。在本实施例的一个具体实施方式中,所述梯形固定模块120在翻转处121设置铰连接结构以完成翻转操作。
51.所述传动单元包括旋转吊臂210及传动模块220,其中,所述旋转吊臂210通过眼板211固定于主甲板600上。所述旋转吊臂210与所述眼板211活动连接,能够在船身法线方向上进行旋转,当所述旋转吊臂旋转210至水平状态时,为减轻所述眼板211的受力,还于船舷500内侧的主甲板600上设置有吊臂支撑梁212。所述旋转吊臂210的长度根据船舶运营的航线和码头兼容情况,设计适当需求的长度。
52.所述旋转吊臂210上还设置有导轨和吊臂轮滑组213,所述吊臂轮滑组213用于收放所述旋转吊臂210及所述梯形模块110,所述导轨可供所述传动模块220进行滑行运动。所述传动模块220包括相互连接的驱动装置及滑动机构,优选地,所述驱动装置与所述滑动装置直线连接。所述驱动装置可以为电动驱动装置如电机驱动、液压驱动等,也可以为手动伸缩驱动装置如手摇绞车等,在本实施例中采用电动驱动与手动伸缩驱动组合的形式,以在动力源失效后仍然能够完成相应操作。所述滑动机构与所述吊臂滑轮组213固定连接,在所述驱动装置的驱动下,所述滑动机构带动所述吊臂滑轮组213沿所述导轨滑行。在本实施例的其他实施方式中,所述传动模块220为所述旋转吊臂210的一部分,此时的所述旋转吊臂210为可伸缩吊臂如液压伸缩吊臂,作为所述传动模块220的滑动旋转吊臂沿固定旋转吊臂的导轨滑行,如此可以降低所述旋转吊臂210收起时的高度。
53.所述固定收放单元包括固定立柱310、绞车,所述固定立柱310与所述绞车可以直接固定在主甲板600上,也可以根据实际需求固定于共同的支撑平台上。在本实施例中所述固定立柱310、所述绞车直接固定于所述旋转吊臂210船内侧的主甲板600上,且所述固定立柱310顶部设置有立柱滑轮组311。所述绞车上缠绕有牵引绳320如常用的钢索,所述牵引绳320绕经所述立柱滑轮组311与所述吊臂滑轮组213连接所述梯形模块110。在本实施例的一个具体实施方式中,所述梯形模块110两侧设置有梯架滑轮组111,所述牵引绳320绕经立柱滑轮、吊臂滑轮、梯架滑轮,然后经由另一侧梯架滑轮、吊臂滑轮后由压绳块固定于所述旋
转吊臂上,或继续绕经立柱滑轮再由压绳块固定于所述固定立柱310上。在本实施例的另一个实施方式中,所述梯形模块110上设置固定柱,所述牵引绳320绕经立柱滑轮、吊臂滑轮后直接固定在所述固定柱上。以上示例为非限制性示例,根据实际需求也可以选择其他连接方式。
54.所述牵引绳320能够完成一个固定循环所需的滑轮为一个滑轮组,所述滑轮组包括所述立柱滑轮组311与所述吊臂滑轮组213。为了防止单根所述牵引绳320受力过大造成断裂,可以设置2组、3组或更多组滑轮组,从而同时用2根、3根或更多根所述牵引绳320来收放及固定所述旋转吊臂210及所述梯形模块110,分担受力,保证系统安全运行。
55.与所述传动模块220的驱动装置类似,所述绞车也可以采用电动驱动或手动驱动,亦或采用两者组合的形式,需要注意的是,为了节约空间提高装置的利用率,所述绞车与所述传动模块220的驱动装置优选同类型的驱动装置,如所述绞车为液压绞车时,所述传动模块220也采用液压驱动;所述绞车为电机驱动时,所述传动模块220也采用电机驱动。当然如有特殊需求,所述绞车与所述传动模块220的驱动装置也可为不同类型的驱动装置,这里不做过度限制。在本实施例中所述绞车也采用电动驱动与手动驱动组合的方式,增加手摇装置,以避免动力源失效造成所述梯形模块砸坏船舶或岸上装置,甚至对人员造成伤害。
56.为了方便集中控制,本实用新型的所述大距离登离船系统还设置有控制单元400,所述控制单元400与所述绞车及所述传动模块220电通信,控制所述绞车正转、反转、启动暂停及转速等,控制所述传动模块220启动暂停等,减轻人员操作难度,提高所述大距离登离船系统的工作效率。优选地,所述旋转吊臂210上还设置有微动开关、接近开关的一种或组合,所述微动开关、所述接近开关与所述传动模块220电连接,并设置在所述旋转吊臂210的设定位置比如所述导轨两端,以控制所述传动模块220能够自动停止,节约能源。更优选地,为了进一步保证安全,还可以在所述旋转吊臂210上设置限位结构如挡板等,以防止所述传动模块220滑出所述旋转吊臂210,造成安全事故。
57.如图1,当所述大距离登离船系统完成操作后,所述控制单元400控制所述绞车收紧所述牵引绳320,所述梯形模块110缓缓升起直至位于所述旋转吊臂210下方,然后所述控制单元400控制所述传动模块220带动所述梯形模块110回至所述导轨的起始端后自动停止。继续收紧所述牵引绳320,所述旋转吊臂210带动所述梯形模块110缓慢向上翻转,直至所述旋转吊臂210与所述固定立柱310紧紧固定在一起,其中,收紧过程中所述梯形模块110另一端受到所述梯形固定模块120的支撑,能够保持平稳翻转。船舶在日常行驶当中,或没有人员登离船时,本大距离登离船系统就处于收紧状态。
58.如图2,当船舶靠岸或其他情况下有人员登离船时,所述控制单元400控制所述绞车释放所述牵引绳320,使所述旋转吊臂210缓慢沿船身法线方向向下翻转。同时在所述梯形固定模块120的支撑和所述旋转吊臂210的带动下,所述梯形模块110也向下翻转,直至所述旋转吊臂210平稳安全地落在所述吊臂支撑梁212上,此时完成了所述大距离登离船系统的向下翻转步骤。
59.如图3-图4,当所述旋转吊臂210和所述梯形模块110平稳向下翻转后,操作人员要在船舷500安全区域内确定船舶与码头、平台或其他船舶的距离情况。通过所述控制单元400控制所述传动模块220沿所述导轨滑行,同时带动所述梯形模块110沿着所述旋转吊臂210上的轨道向船舷500外侧运动。当所述梯形模块110在垂直水面方向上与码头、平台或其
他船舶达到合适的相对位置,再通过所述控制单元400控制所述绞车释放所述牵引绳320,使所述梯形模块110在垂直方向上缓慢下降。为了使所述梯形模块110下降更加平稳,所述吊臂滑轮组213与所述梯形模块110之间还设置有节能平稳装置700。在本实施例中所述节能平稳装置700由动滑轮组构成,当所述牵引绳320释放速度过快时,所述动滑轮组能够起到缓冲的作用,使所述梯形模块110能够平稳缓慢下降。另外由于所述动滑轮组的存在,可减少所述牵引绳320上的受力,维持整个系统的节能和平稳运行。
60.整个下降过程要求操作人员全程在船舷500边进行管控,根据实际目测情况随时调整所述传动模块220向前的距离和所述梯形模块110下降的高度,直至所述梯形模块110的跳板平台与码头、平台或其他船舶平稳对接,待无其他异常情况,引航员便可通过登离船系统进行登离船了。另外,为了提高所述梯形模块110的稳定性,所述梯形模块110末端的跳板平台底部还可以设置橡胶块(未示出),以增加与对接平台的摩擦力,从而使所述大距离登离船系统更加稳固。
61.综上所述,本实用新型的一种大距离登离船系统,具有以下有益效果:所述大距离登离船系统至少包括梯形固定模块与梯形模块组成的梯形单元、旋转吊臂及传动模块组成的传动单元及固定立柱及绞车组成的固定收放单元,所述梯形固定模块不仅作为人员登离船时的上下平台,还作为所述梯形模块的支撑点,以使所述梯形模块在复杂海况下依然能够平稳翻转及能供人员平稳攀登;通过所述传动模块沿所述旋转吊臂滑行带动所述梯形模块沿船长方向旋转,以在垂直水面方向上到达与不同码头、平台或船舶合适的相对位置,然后在所述固定收放单元的操作下平稳对接,从而所述大距离登离船系统能够兼容不同码头、平台或船舶,提高船舶的利用率及经济效益;在不使用时,所述固定收放单元能够收起所述旋转吊臂及所述梯形模块,不影响航行的同时还提高所述大距离登离船系统的使用寿命;所述大距离登离船系统结构简单,易于安装,适用于各种船舶。
62.进一步地,所述大距离登离船系统还包括控制单元,减轻人员的操作难度,提高所述大距离登离船系统的工作效率;设置手摇装置及手动伸缩装置,避免动力源失效导致系统损坏、甚至是造成人员伤亡;于所述吊臂滑轮组与所述梯形模块之间设置节能平稳装置,减少牵引绳受力及减缓所述牵引绳的收放速度,维持整个系统的节能及平稳运行,保证运行安全。所以,本实用新型有效克服了现有技术中的种种缺点而具高度产业利用价值。
63.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。