1.本实用新型涉及机电一体化及精密制造装备领域,具体涉及一种阻尼可调的驱动导向一体化精密运动平台。
背景技术:
2.精密传动机构是现代精密工程装备实现功能的关键部件。传统刚性机构依靠运动副进行力和位移的传递,但构件间不可避免的存在间隙、摩擦和磨损,精密运动平台在高频运动时很难达到微米及其以下的运动精度。柔性导向机构受力作用产生形变,通过弹性变形传递位移,具有线性度高、无摩擦、无反向间隙的优点,被广泛应用于精密运动场合。
3.目前,精密运动平台大多采用压电陶瓷驱动,但由于压电陶瓷堆叠数量和器件尺寸的限制,压电陶瓷行程范围往往在百微米以下。尽管压电陶瓷制动器可以通过采用尺蠖结构提高行程范围,但使用寿命短是最大的限制因素。
4.为了解决这一问题,中国专利cn109848932a中公开了一种采用音圈电机和柔性导向机构传动的精密运动平台,该平台具有毫米级甚至厘米级的大行程范围,但是由于作动电机力输出的限制,此类运动平台刚度低、阻尼低,在定位过程中易激发谐振,导致稳定时间增加,控制系统带宽低、相位裕度不足等问题。
5.中国专利cn211343699u公开了一种音圈电机和柔性导向机构一体化的运动平台,该平台采用动磁式结构的音圈电机,具有运动质量轻和散热好的优点。其中所涉及的导电片为近似无阻尼系统提供一定的阻尼力,但其无法调节的固定阻尼力在平台运动其他阶段,例如在起始加速阶段,固有阻尼力抑制平台的动态特性。
6.因此,如何提供一种结构紧凑、动子轻量化、力密度高及能够有效驱动运动平台达到纳米级的高精度或实现高速定位的精密运动平台成为亟待解决的问题。
技术实现要素:
7.本实用新型的主要目的在于提供一种阻尼可调的驱动导向一体化精密运动平台,从而克服现有技术的不足。
8.为实现前述实用新型目的,本实用新型采用的技术方案包括:一种阻尼可调的驱动导向一体化精密运动平台,所述平台包括基座及安装于基座上的:
9.音圈作动电机,其包括作动定子组件和位于所述作动定子组件内的作动动子组件,所述作动定子组件产生音圈作动磁场,所述作动动子组件在所述音圈作动磁场中受到电磁力作用而运动,传递出音圈作动力;
10.主动阻尼电机,其包括阻尼定子组件和位于所述阻尼定子组件内的阻尼动子组件;所述阻尼定子组件产生阻尼电机磁场,所述阻尼动子组件在所述阻尼电机磁场中运动产生与所述音圈作动力运动方向相反、运动速度大小近似呈或呈线性关系的输出阻尼力;
11.柔性导向机构,其与所述音圈作动电机和主动阻尼电机均相连;
12.所述音圈作动电机输出的所述音圈作动力和所述主动阻尼电机输出的所述输出
阻尼力共同作用于所述柔性导向机构上,所述柔性导向机构受力变形,通过变形传递力和运动。
13.在一优选实施例中,所述作动定子组件具体包括音圈作动定子铁芯和永磁体,所述永磁体贴在所述音圈作动定子铁芯的内轭设置,其在音圈作动定子铁芯内形成均匀的所述音圈作动磁场。
14.在一优选实施例中,所述作动动子组件位于所述音圈作动定子铁芯内且与音圈作动定子铁芯的内端面相对,且与音圈作动定子铁芯之间存在间隙。
15.在一优选实施例中,所述作动动子组件包括动子线圈和动子线圈支架,所述动子线圈通过灌胶灌封于所述动子线圈支架内,与动子线圈支架一体构成扁平型的所述作动动子组件。
16.在一优选实施例中,所述阻尼定子组件具体包括主动阻尼定子铁芯和励磁线圈,所述励磁线圈绕行在所述主动阻尼定子铁芯上,对所述励磁线圈通电形成均匀的所述阻尼电机磁场。
17.在一优选实施例中,所述阻尼动子组件与所述主动阻尼定子铁芯的内端面相对,且与主动阻尼定子铁芯之间存在间隙。
18.在一优选实施例中,所述阻尼动子组件包括导电板和导电板支架,所述导电板通过灌胶灌封于所述导电板支架内,与所述导电板支架一体构成扁平型的所述阻尼动子组件。
19.在一优选实施例中,所述柔性导向机构设置有用于安装所述作动动子组件的第一定位槽,所述作动动子组件通过所述第一定位槽固定于柔性导向机构上;所述柔性导向机构上还设置用于安装所述阻尼动子组件的第二定位槽,所述阻尼动子组件通过所述第二定位槽固定于柔性导向机构上。
20.在一优选实施例中,所述精密运动平台还包括用于采集末端平台产生的位置信号的位移传感器。
21.另一方面,本实用新型所揭示的一种阻尼可调的驱动导向一体化精密运动平台的控制架构,包括:
22.上位机,用于输出作动控制信号和主动阻尼控制信号;
23.音圈作动电机,与所述上位机相连,用于在所述作动控制信号的控制下驱动作动动子组件到达指定的位移;
24.主动阻尼电机,与所述上位机相连,用于在所述主动阻尼控制信号的控制下产生与作动动子组件的运动方向相反的输出阻尼力;
25.末端平台,与所述音圈作动电机和主动阻尼电机均相连,用于接收音圈作动电机和主动阻尼电机传递过来的力和位移;
26.位移传感器,与所述末端平台相连,用于通过闭环控制算法对平台的末端位姿进行实时校正。
27.与现有技术相比较,本实用新型的有益效果至少在于:
28.1、本实用新型提供了一种阻尼可调的驱动导向一体化精密运动平台,该平台一体化设计音圈作动电机、主动阻尼电机和柔性导向机构,通过引入可调的非接触无摩擦的主动阻尼,抑制平台的谐振峰,提高平台的响应速度和抗干扰能力,具有结构紧凑、运动质量
小、作动力及阻尼力密度高、行程范围内输出力平稳的优点。
29.2、音圈作动电机输出与作动电流成正比的音圈作动力,采用一体轻薄封装的扁平型作动动子组件,具有轻量化、推力波动小、易安装的优点。
30.3、主动阻尼电机通过调节阻尼励磁电流大小控制阻尼电机磁场大小,输出与作动动子组件速度成正比的非接触粘滞阻尼力,采用一体轻薄封装的扁平型阻尼动子组件,具有轻量化、出力大且易安装的优点。
31.4、音圈作动力与主动阻尼力共同作用于柔性导向机构,提高了机构的响应速度和抗干扰能力,同时轻量化动子设计提高了系统的控制带宽;末端平台位姿采用位移传感器进行测量,通过闭环控制算法对平台的末端位姿进行实时校正,驱动运动平台实现纳米级高精度定位或高速定位。
附图说明
32.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
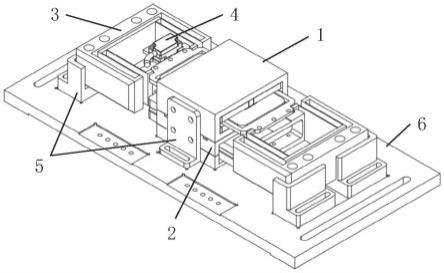
33.图1是本实用新型具体实施例的阻尼可调的驱动导向一体化精密运动平台的整体结构示意图;
34.图2是本实用新型具体实施例的阻尼可调的驱动导向一体化精密运动平台的分解结构示意图;
35.图3是图1中音圈作动电机的结构示意图;
36.图4是图1中主动阻尼电机的结构示意图;
37.图5是图3中音圈作动电机支架的结构示意图;
38.图6是图4中主动阻尼电机支架结构的示意图;
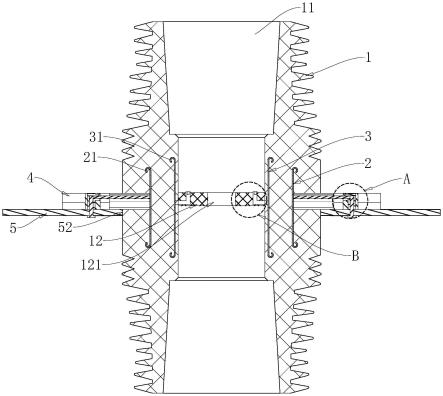
39.图7是图1中音圈作动动子组件和阻尼动子组件共同作用于柔性导向机构的示意图;
40.图8是阻尼可调的驱动导向一体化精密运动平台的控制架构图;
41.附图标记为:
42.1、音圈作动电机,2、主动阻尼电机,3、柔性导向机构,31、第一定位槽,32、第二定位槽,33、弹性簧片,4、位移传感器,5、支撑固定组件,6、基座,11、音圈作动定子铁芯, 12、永磁体,13、动子线圈,14、动子线圈支架,15、动子线圈环氧树脂灌胶,21、主动阻尼定子铁芯,22、励磁线圈,23、导电板,24、导电板支架,25、导电板环氧树脂灌胶。
具体实施方式
43.通过应连同所附图式一起阅读的以下具体实施方式将更完整地理解本实用新型。本文中揭示本实用新型的详细实施例;然而,应理解,所揭示的实施例仅具本实用新型的示范性,本实用新型可以各种形式来体现。因此,本文中所揭示的特定功能细节不应解释为具有限制性,而是仅解释为权利要求书的基础且解释为用于教示所属领域的技术人员在事实上任何适当详细实施例中以不同方式采用本实用新型的代表性基础。
44.本实用新型所揭示的一种阻尼可调的驱动导向一体化精密运动平台,该平台一体化设计音圈作动电机、主动阻尼电机和柔性导向机构,通过集成可调的主动阻尼和音圈作动力共同作用于柔性支撑导向机构,有利于提高平台的响应速度和抗干扰能力,同时动子轻量化设计有利于提高系统的控制带宽,具有结构紧凑、动子轻量化、力密度高、输出力和电流呈近似线性关系,安装简便,能够有效驱动运动平台达到纳米级的高精度或实现高速定位。
45.结合图1、图2所示,本实用新型实施例所揭示的一种阻尼可调的驱动导向一体化精密运动平台,包括基座6和固定在基座6上的音圈作动电机1、主动阻尼电机2、柔性导向机构3、位移传感器4和支撑固定组件5。其中,音圈作动电机1和主动阻尼电机2分别上下相对设置,柔性导向机构3采用分布式柔性导向机构且采用并联对称式结构,两个柔性导向机构3分别相对称的设置于音圈作动电机1和主动阻尼电机2的左右两侧,音圈作动电机1的左右两端分别与两个柔性导向机构3相连,主动阻尼电机2的左右两端也分别与两个柔性导向机构3相连,音圈作动电机1的音圈作动力与主动阻尼电机2的主动阻尼力共同作用于柔性导向机构,且通过闭环控制算法对平台的末端位姿进行实时校正,驱动运动平台实现纳米级高精度定位或高速定位。
46.其中,如图3所示,音圈作动电机1通过支撑固定组件5固定于基座6上,其具体包括作动定子组件和作动动子组件,作动定子组件具体包括音圈作动定子铁芯11和永磁体12,永磁体12贴在音圈作动定子铁芯11的内轭设置,其在音圈作动定子铁芯11内形成均匀的音圈作动磁场。作动动子组件位于音圈作动定子铁芯11内且与音圈作动定子铁芯11的内端面相对,且与音圈作动定子铁芯11之间存在间隙。本实施例中,如图5所示,作动动子组件具体包括动子线圈13和动子线圈支架14,动子线圈13采用导电性材料绕制成型后,使用环氧树脂灌胶15平整灌封于动子线圈支架14内,与动子线圈支架14一体构成扁平型作动动子组件,利于散热。动子线圈13通电时,作动动子组件在永磁体12产生的音圈作动磁场中受到电磁力作用而运动,音圈作动力传递到与之相连的柔性导向机构3,柔性导向机构3受力变形而产生位移。实施时,永磁体12可以采用哈尔巴赫永磁阵列,或交替磁极排布方式,也可以是多层结构等。实施时,作动定子组件以及与之匹配的作动动子组件的尺寸参数,可随需求输出的音圈作动力变化而进行参数优化。
47.主动阻尼电机2位于音圈作动电机1的下方,且同样通过支撑固定组件5固定于基座6 上,如图4所示,其具体包括阻尼定子组件和阻尼动子组件,阻尼定子组件具体包括阻尼主动阻尼定子铁芯21和励磁线圈22,励磁线圈22绕行在主动阻尼定子铁芯21上,对励磁线圈22通电形成均匀的阻尼电机磁场。阻尼动子组件与主动阻尼定子铁芯21的内端面相对,且与主动阻尼定子铁芯21之间也存在间隙。本实施例中,如图6所示,阻尼动子组件具体包括导电板23和导电板支架24,导电板23使用环氧树脂灌胶25,平整灌封于导电板支架24 内,与导电板支架24一体构成扁平型阻尼动子组件。励磁线圈22通电,在主动阻尼定子铁芯12中形成磁路,产生阻尼电机磁场,其中阻尼电机磁场受励磁线圈22控制,阻尼动子组件在阻尼电机磁场中运动时,导电板23产生与上述音圈作动力的运动方向相反、运动速度大小近似线性的非接触粘滞阻尼力;如图7所示,音圈作动力与该非接触粘滞阻尼力共同作用于柔性导向机构3上。实施时,阻尼定子组件以及与之匹配的阻尼动子组件的尺寸参数,可随需求输出阻尼力的变化而进行参数优化。励磁线圈22采用导电性材料,绕制成型后嵌入在
主动阻尼定子铁芯21内,平整灌封构成一个整体,利于散热。
48.实施时,音圈作动定子铁芯11和主动阻尼定子铁芯21可以分别采用不同的软磁材料,例如,硅钢片,电工纯铁,铁镍合金等。音圈作动定子铁芯11的励磁源可以采用除永磁励磁外的其他励磁方式,如电励磁或混合励磁等方式,可以为多层结构,以提高音圈作动电机1 的性能。主动阻尼定子铁芯21的励磁源可以采用除电励磁以外的其他主动可调的励磁磁场,如混合励磁等方式,可以为多层结构,以提高主动阻尼电机2的性能。
49.实施时,动子线圈支架14和导电板支架24可以采用碳纤维、玻璃纤维、铝合金等低密度、高强度、不导磁材料。
50.实施时,上述作动动子组件和阻尼动子组件可以根据需要采用铜、铝、银或其他导电材料,进行多层结构和排布方式,以产生需要的作动力或阻尼力。
51.优选地,上述定子组件和动子组件的导热性良好,可以快速传导线圈产生的热,从而限制温升。
52.进一步地,上述的运动平台包括但不限于音圈作动电机1,还可以采用三相直线电机,或其他高精度直线运动装置。
53.柔性导向机构3具体与音圈作动电机1的作动动子组件以及主动阻尼电机2的阻尼动子组件相连。具体地,柔性导向机构3设置有用于安装扁平型作动动子组件的第一定位槽,作动动子组件通过该第一定位槽固定于柔性导向机构3上,同样的,柔性导向机构3上还设置用于安装扁平型阻尼动子组件的第二定位槽,阻尼动子组件通过该第二定位槽固定于柔性导向机构3上。
54.上述音圈作动电机1产生的音圈作动力与主动阻尼电机2产生的非接触粘滞阻尼力共同作用于柔性导向机构3上,柔性导向机构3受力变形,通过变形传递力和运动。实施时,柔性导向机构3采用高强度、高弹性、低密度材料,采用慢走丝线切割技术进行加工形成拓扑形状,减少了机械装配误差对机构运动精度的影响。
55.进一步地,本实用新型阻尼可调的驱动导向一体化精密运动平台还包括位移传感器4,用于采集末端平台产生的位置信号,通过闭环控制算法对平台的末端位姿进行实时校正,保证运动平台的运动精度。实施时,位移传感器4可采用光栅尺或激光位移传感器。
56.进一步地,本实用新型阻尼可调的驱动导向一体化精密运动平台还包括线性伺服放大器,通过线性伺服放大器将指令信号放大后作用于音圈作动电机1和主动阻尼电机2,线性伺服放大器可有效降低驱动器的输出纹波,从而保障音圈作动电机1和主动阻尼电机2的精确度和线性度。
57.基于上述阻尼可调的驱动导向一体化精密运动平台,如图8所示,本实用新型实施例还揭示一种精密运动平台的控制架构,包括上位机、线性伺服放大器、音圈作动电机1、主动阻尼电机2、末端平台和位移传感器4,其中,上位机与线性伺服放大器相连,线性伺服放大器与音圈作动电机1和主动阻尼电机2均相连,音圈作动电机1和主动阻尼电机2均与末端平台相连,末端平台与位移传感器4相连,末端平台包括柔性导向机构3。位移传感器4与上位机相连,该控制架构的工作原理具体为:由上位机输出所需要的作动控制信号施加于线性伺服放大器,线性伺服放大器将作动控制信号放大为对应的作动电流,作用于音圈作动电机1的动子线圈13,驱动作动动子组件到达指定的位移,柔性导向机构3的各个弹性簧片将会发生对应的弹性变形,将驱动的力和位移传递到机构的末端平台。由于系统无阻尼的
特性,末端平台极易产生振动,上位机输出所需要的主动阻尼控制信号施加于线性伺服放大器,线性伺服放大器将主动阻尼控制信号放大为对应的主动阻尼电流,作用于主动阻尼电机2的励磁线圈22,产生与作动动子组件的运动方向相反的非接触粘滞阻尼力,抑制末端平台振动,从而降低平台运动超调量,减少平台调停时间。末端平台位姿采用位移传感器4进行测量,通过闭环控制算法对平台的末端位姿进行实时校正,使机构末端平台实现纳米级高精度定位或高速定位。
58.本实用新型具有以下优点:1、本实用新型提供了一种阻尼可调的驱动导向一体化精密运动平台,该平台一体化设计音圈作动电机、主动阻尼电机和柔性导向机构,通过引入可调的非接触无摩擦的主动阻尼,抑制平台的谐振峰,提高平台的响应速度和抗干扰能力,具有结构紧凑、运动质量小、作动力及阻尼力密度高、行程范围内输出力平稳的优点。2、音圈作动电机输出与作动电流成正比的音圈作动力,采用一体轻薄封装的扁平型作动动子组件,具有轻量化、推力波动小、易安装的优点。3、主动阻尼电机通过调节阻尼励磁电流大小控制阻尼电机磁场大小,输出与作动动子组件速度成正比的非接触粘滞阻尼力,采用一体轻薄封装的扁平型阻尼动子组件,具有轻量化、出力大且易安装的优点。4、音圈作动力与主动阻尼力共同作用于柔性导向机构,提高了机构的响应速度和抗干扰能力,同时轻量化动子设计提高了系统的控制带宽;末端平台位姿采用位移传感器进行测量,通过闭环控制算法对平台的末端位姿进行实时校正,驱动运动平台实现纳米级高精度定位或高速定位。
59.本实用新型的各方面、实施例、特征及实例应视为在所有方面为说明性的且不打算限制本实用新型,本实用新型的范围仅由权利要求书界定。在不背离所主张的本实用新型的精神及范围的情况下,所属领域的技术人员将明了其它实施例、修改及使用。
60.在本实用新型案中标题及章节的使用不意味着限制本实用新型;每一章节可应用于本实用新型的任何方面、实施例或特征。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。