1.本发明涉及无人机控制领域,尤其涉及一种堤坝监测无人机群控制方法及系统。
背景技术:
2.传统的堤坝监测是通过人工巡逻的方式来实现,不仅需要大量的人力投入,还存在漏查的风险,且巡逻人员的人身安全也难以保障。采用无人机代替人力是一种可行的解决方案,而使用无人机集群进行巡逻能够对堤坝情况进行更好地分析识别。同时,在实际应用中,考虑到不同无人机的算力等情况,常使用边缘计算的方式对数据进行处理。
3.堤坝的险情监测可以被看作目标检测问题,而随着深度学习技术的迅速发展,基于卷积神经网络的目标检测方法目前已趋于成熟,和无人机结合应用可以有效地提升堤坝险情监测的性能。
技术实现要素:
4.为了针对现有技术中堤坝险情监测采用无人机群的控制问题,本发明提供一种堤坝监测无人机群控制方法及系统。方法包括以下步骤:
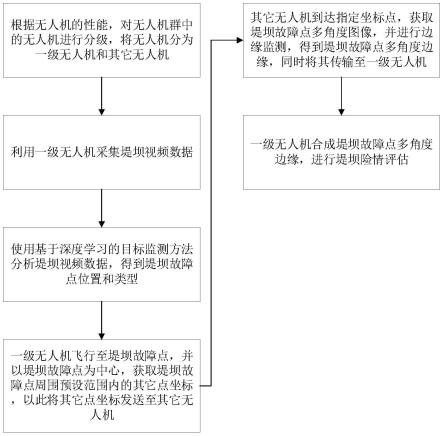
5.s1、根据无人机的性能,对无人机群中的无人机进行分级,将无人机分为一级无人机和其它无人机;
6.s2、利用一级无人机采集堤坝视频数据;
7.s3、使用基于深度学习的目标监测方法分析堤坝视频数据,得到堤坝故障点位置和类型;
8.s4、一级无人机飞行至堤坝故障点,并以堤坝故障点为中心,获取堤坝故障点周围预设范围内的其它点坐标,以此将其它点坐标发送至其它无人机;
9.s5、其它无人机到达指定坐标点,获取堤坝故障点多角度图像,并进行边缘监测,得到堤坝故障点多角度边缘,同时将其传输至一级无人机;
10.s6、一级无人机合成堤坝故障点多角度边缘,进行堤坝险情评估。
11.本发明提供的有益效果是:通过使用无人机集群对堤坝进行巡逻解放了人力,更加的省时省力,同时利用目标检测算法识别故障点保证了监测的性能,边缘计算的方式也对算力进行了合理的利用,更加适应实际应用,使得堤坝监测能够有效地进行。
附图说明
12.图1是本发明方法流程示意图。
具体实施方式
13.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明实施方式作进一步地描述。
14.请参考图1,图1是本发明方法流程示意图;一种堤坝监测无人机群控制方法,包括
以下:
15.s1、根据无人机的性能,对无人机群中的无人机进行分级,将无人机分为一级无人机和其它无人机;
16.需要说明的是,步骤s1中,无人机分级规则为:对无人机的属性影响因子进行综合评定得到无人机的优先级。
17.所述综合评定过程如下:
18.1架无人机的属性影响因子共n个;作为一种实施例,属性影响因子包括无人机的姿态稳定性、算力、剩余电量等因素;
19.对每个属性影响因子按照预设值进行定量打分;作为一种实施例,比如将姿态稳定性分为高、中、低三个档次,并依次赋予3分、2分、1分等,对于其它影响因子,如算力和剩余电量等,可按同理进行;
20.对属性影响因子进行加权求和,得到总分数;需要说明的是,越重要的影响因子所对应的权重越大,影响因子的重要程度取决于实际情况,比如在需要长时间任务时,最重要的影响因子为剩余电量,而在需要精确监测时,最重要的影响因子为算力;关于权重的分配也可根据实际情况进行分配。
21.根据总分数的高低排序,排在第一位的为一级无人机,其余为其它无人机。
22.若第一无人机有多个,则依次比较第一无人机的属性影响因子的重要程度,重要程度高的作为第一无人机,剩余的分类为其它无人机;其中属性影响因子的重要程度根据实际情况设定。比如对粗排序得到的优先级最高的几架无人机的排序进行调整:先比较不同无人机的算力,算力高的优先级更高;若算力相同,再比较姿态稳定性,姿态稳定性越好的优先级更高;若姿态稳定性系统,再比较剩余电量,剩余电量越多的优先级更高,若全部相同,则优先级相同。最后选择出一架优先级最高的无人机为一级无人机,若所有优先级最高的无人机不止一架则随机选择一架作为一级无人机。
23.s2、利用一级无人机采集堤坝视频数据;
24.s3、使用基于深度学习的目标监测方法分析堤坝视频数据,得到堤坝故障点位置和类型;
25.作为一种实施例,由一级无人机使用目标检测算法对采集的视频进行实时分析,判断前方是否有故障点,若无故障点则继续飞行,接着进行目标检测。使用的目标检测算法为在yolov5框架上的改进方案,利用搜集的堤坝故障点数据集对模型进行微调训练。首先对原始图片帧进行自适应缩放的处理,之后采用卷积网络对输入的图像进行特征提取和融合,且为了适应堤坝监测任务,将focus层优化成卷积层以提升推理速度,最终预测出堤坝故障点位置和类型。
26.s4、一级无人机飞行至堤坝故障点,并以堤坝故障点为中心,获取堤坝故障点周围预设范围内的其它点坐标,以此将其它点坐标发送至其它无人机;
27.作为一种实施例,当一级无人机发现故障点时,选择距离最近的故障点位置作为目标位置;一级无人机指挥无人机集群到达指定位置:具体步骤如下:
28.一级无人机先飞行至目标位置正上方,之后拍摄一张图像i对其进行自适应分析,从而对无人机集群的位置进行调整,让无人机集群所在位置不仅能够保证拍摄图像的清晰度,而且恰好能观测到故障点的全貌。
29.自适应分析算法为基于目标检测的自适应分析方法;一级无人机先自行调整至位置x处,之后通过通信协议发送指令给二级无人机,使其飞行至距离故障点的垂直高度为h,以x点为圆心,r为半径的圆周上,呈等距离排列。
30.s5、其它无人机到达指定坐标点,获取堤坝故障点多角度图像,并进行边缘监测,得到堤坝故障点多角度边缘,同时将其传输至一级无人机;
31.所有无人机在指定位置对故障点进行监测,各自对指定角度下的故障点图像进行边缘检测,之后通过通信协议将多角度数据发送给一级无人机;
32.s6、一级无人机合成堤坝故障点多角度边缘,进行堤坝险情评估。
33.作为一种实施例,一级无人机对来自无人机集群的多个角度的数据进行处理,根据多角度数据对故障点的类别和危险级别进行评估,通过对不同角度下的故障类别和严重程度进行对比和综合分析,得到故障类别,危险级别等;
34.将多角度的观测结果融合成一张全局图,用于提高故障处理的效率和准确率,共有n个角度的数据,最终合成一张图像作为故障观测图像。
35.一种堤坝监测无人机群控制系统,包括优先级分析模块、目标检测模块、通信模块、边缘计算模块和危险评估模块。其中优先级分析模块用于对无人机集群的优先级进行分析,确定一级无人机和二级无人机;目标检测模块用于一级无人机对收集的巡逻视频进行理解分析,确定视频中是否包含故障点以及故障点的具体位置;通信模块用于一级和二级无人机间的通信,包括一级无人机向二级无人机发送指令,二级无人机向一级无人机传送数据;边缘计算模块用于二级无人机对收集到的特定角度的监测图像进行边缘检测,并且将原图像和边缘检测数据通过通信模块发送给一级无人机;危险评估模块用于一级无人机对收集到的多角度监测数据进行处理,合成多角度图像,判定故障类别并对危险程度进行评估。各模块的实现过程如下:
36.优先级分析模块:根据无人机的性能,对无人机群中的无人机进行分级,将无人机分为一级无人机和其它无人机;
37.目标检测模块:利用一级无人机采集堤坝视频数据;使用基于深度学习的目标监测方法分析堤坝视频数据,得到堤坝故障点位置和类型;
38.通信模块:一级无人机飞行至堤坝故障点,并以堤坝故障点为中心,获取堤坝故障点周围预设范围内的其它点坐标,以此将其它点坐标发送至其它无人机;
39.边缘计算模块:其它无人机到达指定坐标点,获取堤坝故障点多角度图像,并进行边缘监测,得到堤坝故障点多角度边缘,同时将其传输至一级无人机;
40.危险评估模块:一级无人机合成堤坝故障点多角度边缘,进行堤坝险情评估。
41.本发明的有益效果是:通过使用无人机集群对堤坝进行巡逻解放了人力,更加的省时省力,同时利用目标检测算法识别故障点保证了监测的性能,边缘计算的方式也对算力进行了合理的利用,更加适应实际应用,使得堤坝监测能够有效地进行。
42.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。