1.本发明涉及航天器运动机构控制技术领域,具体涉及一种脱靶量与轨迹预测协同控制闭环跟踪系统及方法。
背景技术:
2.光电跟踪系统利用光学探测器与伺服跟踪系统,用于对运动目标的跟踪,可运用于火控、制导、激光通信、航空航天等领域。星载光电跟踪系统采用具有高机动能力的伺服机构,带动光学载荷运动,实现对目标的指向与跟踪,对伺服机构的控制精度直接影响光电跟踪系统对目标的跟踪性能。
3.脱靶量控制法是一种对星载光电跟踪系统伺服机构常用的控制方法,通过光学载荷采集图像,辨识目标在图像中的位置,解算出目标与像平面期望位置的差,即脱靶量,并通过闭环反馈控制方法来控制伺服机构的运动。然而,对于机动能力较强、运动速度变化较快的目标,生成的控制率难以准确追踪目标的运动,跟踪系统对目标的跟踪精度会降低,目标在光学载荷视场中的位置波动较大,这对于光电跟踪系统的性能有较大影响。
4.为补偿由于目标快速运动所产生的脱靶量误差,现有的方法一般为结合目标角速度估计的复合控制方法。将脱靶量与仪器位置信息结合得到目标角位置,将角位置通过滤波算法得到目标角速度估计值,反馈到伺服机构转速控制回路进行控制,从而对目标运动造成的脱靶量误差进行补偿。相比于单独的脱靶量控制,该方法对运动目标的追踪能力有所增强。然而,目标在空间中的运动信息是三维的,但该方法所采用目标角位置与角速度实际上只包含目标映射到二维脱靶量平面上的运动信息,而不包含垂直于脱靶量平面的方向上的运动信息,即损失了运动信息的一个维度,这对于目标角速度的估计精度会产生很大影响,导致前馈补偿误差的增大,进而造成光电跟踪系统的性能降低。
5.对于光学跟踪卫星而言,在轨通常使用多星观测同一目标,或通过一定的引导信息引导单星观测。在此情况下,可获得目标在空间中较准确的三维轨迹和三维运动特性。当存在目标运动特性或运动轨迹的先验信息时,更是可获得高精度的目标三维运动数据。此时,若仍采用基于二维信息的目标角速度复合控制法,舍弃一个维度的运动信息,将大大损失控制精度。
技术实现要素:
6.有鉴于此,本发明提供了种脱靶量与轨迹预测协同控制闭环跟踪系统及方法,能够提高光电跟踪系统对高机动目标的跟踪能力,满足星载光电跟踪系统的实际需求。
7.为实现上述目的,本发明技术方案如下:
8.本发明的一种脱靶量与轨迹预测协同控制闭环跟踪系统,包含目标脱靶量辨识模块、脱靶量静态误差控制量生成模块、目标三维轨迹获取模块、脱靶量动态误差反馈控制量生成模块以及脱靶量复合闭环控制模块;
9.目标脱靶量辨识模块接收来自光学图像采集装置的图像输入,辨识出目标在光学
像平面上的脱靶量;目标脱靶量计算模块与目标三维轨迹计算模块、脱靶量静态误差反馈控制量计算模块分别相连,向其提供目标二维脱靶量信息输入;
10.脱靶量静态误差反馈控制量生成模块生成补偿脱靶量误差的反馈控制量,并作为输入提供给脱靶量复合闭环控制模块;
11.目标三维轨迹获取模块对目标三维位置进行生成,并提供给脱靶量动态误差反馈控制量模块,作为其生成控制量的输入;
12.脱靶量动态误差反馈控制量生成模块生成补偿目标运动所需的脱靶量动态误差反馈控制量,作为输入提供给脱靶量复合闭环控制模块;
13.脱靶量复合闭环控制模块接收来自脱靶量静态误差反馈控制量、脱靶量动态误差反馈控制量两部分控制量,并对这两部分控制量进行整合处理,最终生成光电跟踪伺服机构的控制信号。
14.其中,所述脱靶量静态误差反馈控制量生成模块进行目标三维位置的外推,并将三维位置投影至二维光学像平面上,得到由目标运动造成的脱靶量移动量,从而生成为补偿目标运动所需的反馈控制量。
15.其中,如外部存在更精确的目标三维轨迹先验数据,则用该结果替代所述目标三维轨迹获取模块的三维轨迹生成结果。
16.本发明还提供了一种脱靶量与轨迹预测协同控制闭环跟踪方法,采用本发明所述的系统,具体如下:目标脱靶量辨识:根据光学载荷采集的图像,对目标在光学像平面上的脱靶量进行辨识;脱靶量静态误差反馈控制量生成:根据脱靶量反映出的目标与靶心位置偏差,生成在不考虑目标移动的情况下,补偿脱靶量误差所需的反馈控制量;目标三维轨迹获取:结合二维脱靶量信息与伺服机构姿态数据、卫星位置与姿态数据、载荷成像模型以及系统构型矩阵获得目标角位置,融合多星观测结果,或融合单星观测结果与外部先验信息,生成目标的三维轨迹;脱靶量动态误差反馈控制量生成:将目标三维位置进行外推,并投影至二维像平面,得到目标移动造成的脱靶量移动预测值,生成为补偿脱靶量移动所需的反馈控制量;脱靶量复合闭环控制信号生成:根据生成的脱靶量静态以及动态误差反馈控制量,按照设定的规则进行整合处理,生成光电跟踪伺服机构的控制信号,用于系统的控制。
17.其中,生成脱靶量动态误差反馈控制量的过程具体如下:
18.步骤1,目标三维速度估计:通过目标三维轨迹得到目标的三维速度,并通过滤波估计算法外推下一控制周期内的目标三维速度预测值;
19.步骤2,目标三维位置估计:根据步骤1所得三维速度,结合系统控制周期以及计算时延造成的伺服控制时延,估计目标在下一周期的空间三维位置预测值;
20.步骤3,目标二维脱靶量估计:根据步骤2所得目标三维位置预测值,结合伺服机构姿态数据、卫星位置与姿态数据、载荷成像模型以及系统构型矩阵参数,将目标三维位置预测值投影到二维像平面,得到目标的二维脱靶量移动预测值;
21.步骤4,补偿目标移动的脱靶量控制量生成:根据步骤3所得目标脱靶量移动预测值,结合一定的控制率生成算法,生成为补偿目标脱靶量移动所需的反馈控制量。
22.其中,所述步骤4中,所述控制率生成算法为pid算法。
23.有益效果:
24.1、本发明系统采用目标的三维运动信息进行脱靶量预测和反馈控制,提高了目标
运动的预测精度,从而提高了脱靶量的闭环控制精度,增强了对运动目标的跟踪能力,避免了在脱靶量反馈控制时仅采用目标二维运动信息、缺少一个维度的运动信息造成的精度损失。
25.2、本发明的脱靶量与轨迹预测协同控制闭环跟踪方法,是星载光电跟踪系统的闭环跟踪控制方法,将目标的三维运动信息运用到脱靶量的闭环跟踪控制中,以解决现有控制方法中仅采用目标二维运动信息,缺少一个维度的信息所造成的精度不足问题。该方法通过目标的三维运动信息获取脱靶量的移动信息,进行脱靶量与轨迹预测的复合闭环控制,从而提高光电跟踪系统对高机动目标的跟踪能力,满足星载光电跟踪系统的实际需求。
26.3、当存在精度较高的目标三维运动先验信息时,也可用于本发明进行脱靶量复合控制,进一步提高对运动目标的跟踪精度。
附图说明
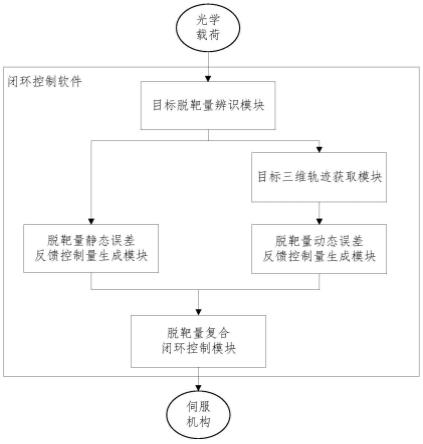
27.图1为本发明系统框图。
28.图2为本发明系统工作过程示意图。
29.图3为本发明脱靶量动态误差反馈控制量生成过程示意图。
具体实施方式
30.下面结合附图并举实施例,对本发明进行详细描述。
31.针对现有脱靶量与目标角速度复合控制方法对运动目标跟踪精度不足的问题,本发明公开了一种脱靶量与轨迹预测协同控制闭环跟踪系统和方法,用于提高光电跟踪系统对运动目标的跟踪能力,满足星载光电跟踪系统的实际需求。
32.本发明的脱靶量与轨迹预测协同控制闭环跟踪系统如图1所示,包含:目标脱靶量辨识模块、脱靶量静态误差控制量生成模块、目标三维轨迹获取模块、脱靶量动态误差反馈控制量生成模块以及脱靶量复合闭环控制模块。
33.其中,目标脱靶量生成模块是整个装置的输入模块,脱靶量复合闭环控制模块是整个软件的输出模块。
34.目标脱靶量辨识模块主要接收来自光学图像采集装置的图像输入,辨识出目标在光学像平面上的脱靶量。目标脱靶量计算模块与目标三维轨迹计算模块、脱靶量静态误差反馈控制量计算模块分别相连,向其提供目标二维脱靶量信息输入。
35.脱靶量静态误差反馈控制量生成模块主要接收来自目标脱靶量计算模块的脱靶量输入。在不考虑目标与像平面的相对运动、仅考虑静态控制误差的情况下,生成补偿脱靶量误差的反馈控制量,并作为输入提供给脱靶量复合闭环控制模块。
36.目标三维轨迹获取模块主要接收来自目标脱靶量计算模块的二维脱靶量输入,对目标三维位置进行生成,并提供给脱靶量动态误差反馈控制量模块,作为其生成控制量的输入。如外部存在更精确的目标三维轨迹先验数据,可用该结果替代该模块的三维轨迹生成结果。
37.脱靶量动态误差反馈控制量生成模块是整个软件的核心,主要接受来自目标三维轨迹获取模块的目标三维轨迹信息,在考虑目标运动的情况下,生成补偿目标运动所需的脱靶量动态误差反馈控制量。该模块可进行目标三维位置的外推,并将三维位置投影至二
维光学像平面上,得到由目标运动造成的脱靶量移动量,从而生成为补偿目标运动所需的反馈控制量,作为输入提供给脱靶量复合闭环控制模块。
38.脱靶量复合闭环控制模块是本软件的输出模块,接收来自脱靶量静态误差反馈控制量、脱靶量动态误差反馈控制量两部分控制量,并根据一定的规则对这两部分控制量进行整合处理,最终生成光电跟踪伺服机构的控制信号。本发明脱靶量与轨迹预测协同控制闭环跟踪系统的工作过程如图2所示。
39.本发明还提供了一种脱靶量与轨迹预测协同控制闭环跟踪方法,具体如下:目标脱靶量辨识:根据光学载荷采集的图像,对目标在光学像平面上的脱靶量进行辨识;脱靶量静态误差反馈控制量生成:根据脱靶量反映出的目标与靶心位置偏差,生成在不考虑目标移动的情况下,补偿脱靶量误差所需的反馈控制量;目标三维轨迹获取:结合二维脱靶量信息与伺服机构姿态数据、卫星位置与姿态数据、载荷成像模型、系统构型矩阵等参数获得目标角位置,融合多星观测结果,或融合单星观测结果与外部先验信息,生成目标的三维轨迹,如外部存在更精确的目标三维轨迹先验数据,可作为输入,替代三维轨迹生成结果;脱靶量动态误差反馈控制量生成:将目标三维位置进行外推,并投影至二维像平面,得到目标移动造成的脱靶量移动预测值,生成为补偿脱靶量移动所需的反馈控制量;脱靶量复合闭环控制信号生成:根据生成的脱靶量静态以及动态误差反馈控制量,按照设定的规则进行整合处理,生成光电跟踪伺服机构的控制信号,用于系统的控制。
40.其中,生成脱靶量动态误差反馈控制量的过程如图3所示,具体如下:
41.步骤1,目标三维速度估计:通过目标三维轨迹得到目标的三维速度,并通过滤波估计算法外推下一控制周期内的目标三维速度预测值。
42.步骤2,目标三维位置估计:根据步骤1所得三维速度,结合系统控制周期、计算时延等造成的伺服控制时延,估计目标在下一周期的空间三维位置预测值。
43.步骤3,目标二维脱靶量估计:根据步骤2所得目标三维位置预测值,结合伺服机构姿态数据、卫星位置与姿态数据、载荷成像模型、系统构型矩阵等参数,将目标三维位置预测值投影到二维像平面,得到目标的二维脱靶量移动预测值。
44.步骤4,补偿目标移动的脱靶量控制量生成:根据步骤3所得目标脱靶量移动预测值,结合一定的控制率生成算法,如pid算法等,生成为补偿目标脱靶量移动所需的反馈控制量。
45.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
