技术特征:
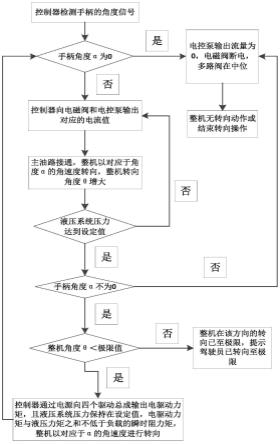
1.一种装载机转向控制方法,其特征在于,采用四轮独立驱动方式,每个轮边分别设置有电机驱动总成驱动轮胎行走,四个轮边能够独立进行驱动;转向控制方法包括:响应于驾驶员通过操作手柄动作给出转向需求,监测手柄角度和转向液压系统压力;其中,所述手柄角度包括手柄角度大小和方向;控制器根据手柄角度控制转向液压系统向转向油缸输出对应的流量和整机转向角速度;响应于手柄方向上有响应且转向液压系统压力达到设定最大压力值,控制转向液压系统保持最大压力输出,同时控制四个电机驱动总成分别输出电驱动力矩且四个电驱动力矩具有差值,电驱动力矩与液压转向力矩之和不低于负载的瞬时转向阻力矩,实现整机以对应于手柄角度的转向角速度进行转向。2.根据权利要求1所述的装载机转向控制方法,其特征在于,包括:响应于驾驶员通过操作手柄动作给出转向需求,获取手柄角度和电控泵出口压力p,其中,所述手柄角度包括手柄角度α和手柄方向;响应于手柄角度α不为零,且电控泵出口压力p小于设定最大压力值,控制器向电磁阀输出与α及手柄方向对应的电信号,向电控泵输出与α对应的电信号;响应于手柄角度α不为零,电控泵出口压力p达到设定最大压力值,液压系统开始溢流;发出指令控制电控泵出口压力p保持在设定最大压力值,同时控制电机驱动总成输出电驱动力矩,所述电驱动力矩与液压转向力矩m1之和不低于负载的瞬时转向阻力矩m2,直至整机以对应于手柄角度α的转向角速度进行转向。3.根据权利要求1所述的装载机转向控制方法,其特征在于,包括:响应于手柄角度α为零,控制电控泵输出流量为0,电磁阀断电。4.根据权利要求1或2所述的装载机转向控制方法,其特征在于,在转向控制过程中,还包括:获取整机转向角度θ,响应于整机转向角度θ达到极限值,提示驾驶员整机转向至极限位置。5.一种装载机转向控制系统,其特征在于,包括控制器,所述控制器包括存储器和处理器,存储器用于存储指令,所述指令用于控制所述处理器进行操作,以执行根据权利要求1-4任一项所述的装载机转向控制方法。6.根据权利要求5所述的装载机转向控制系统,其特征在于,还包括:手柄、四轮独立电机驱动总成、转向油缸和转向液压系统;手柄,被配置为:驾驶员通过操作手柄动作给出转向需求,输入手柄角度,并发送给所述控制器;压力传感器,被配置为采集转向液压系统压力,并发送给所述控制器;整机转向角度传感器,被配置为采集整机转向角度,并发送给所述控制器;转向液压系统,被配置为接收所述控制器发出的指令,输出对应的液压转向力矩;电机驱动总成,被配置为接收所述控制器发出的指令,输出电驱动力矩。7.根据权利要求6所述的装载机转向控制系统,其特征在于,所述转向液压系统包括电控泵、主溢流阀、多路阀和先导阀组;电控泵的控制端与所述控制器信号连接,电控泵通过多路阀给转向油缸供油,电控泵出口并联主溢流阀,先导阀组的b口接电控泵出口,先导阀组的a口回油,先导阀组的c口接
多路阀的其中一个控制油口,先导阀组的d口接多路阀的另一控制油口,先导阀组的f端子、e端子与所述控制器信号连接,用于通过先导阀组控制多路阀的工作位切换以及阀芯开度。8.根据权利要求7所述的装载机转向控制系统,其特征在于,所述先导阀组包括:换向阀、第一电磁阀、第二电磁阀、先导溢流阀;先导阀组的b口一路连至换向阀的p2口,换向阀的a2口接先导阀组的c口、d口两者之一、换向阀的b2口接先导阀组的c口、d口两者之另一,换向阀t2口接a口;先导阀组b口的另一路经先导溢流阀接回油;第一电磁阀的d1口和第二电磁阀的d2口均连至b口;第一电磁阀的e1口和第二电磁阀的e2口均连至a口;第一电磁阀的c1口连至换向阀的两个控制油口之一,第二电磁阀的c2口连至换向阀的两个控制油口之另一。9.根据权利要求8所述的装载机转向控制系统,其特征在于,所述先导阀组还包括第一减压阀、第二减压阀,先导阀组的b口至换向阀的p2口之间串接有第一减压阀;先导阀组的b口至第一电磁阀的d1口、b口至第二电磁阀的d2口之间串接有第二减压阀。10.根据权利要求9所述的装载机转向控制系统,其特征在于,所述先导阀组还包括节流阀,节流阀的进口连至先导阀组b口,节流阀的出口一路连至第二减压阀,另一路连至先导溢流阀。11.根据权利要求8所述的装载机转向控制系统,其特征在于,所述转向液压系统还包括油箱,电控泵吸油口、主溢流阀出口、多路阀t1口,先导阀组的a口均连至油箱。12.根据权利要求7所述的装载机转向控制系统,其特征在于,所述多路阀为三位四通阀。13.一种装载机,其特征在于,包括权利要求5-12任一项所述的装载机转向控制系统。
技术总结
本发明公开了一种大吨位装载机转向控制方法及系统,采用四轮独立驱动方式,每个轮边分别设置有电机驱动总成驱动轮胎行走,四个轮边能够独立进行驱动;转向控制方法包括:响应于驾驶员通过操作手柄动作给出转向需求,监测手柄角度和转向液压系统压力;控制器根据手柄角度控制转向液压系统向转向油缸输出对应的流量和整机转向角速度;响应于手柄方向上有响应且转向液压系统压力达到设定最大压力值,控制转向液压系统保持最大压力输出,同时控制四个电机驱动总成分别输出电驱动力矩且四个电驱动力矩具有差值,电驱动力矩与液压转向力矩之和不低于负载的瞬时转向阻力矩,实现整机以对应于手柄角度的转向角速度进行转向。对应于手柄角度的转向角速度进行转向。对应于手柄角度的转向角速度进行转向。
技术研发人员:王小虎 魏加洁 王振 韩嫔 范小童 程然 李伯宇 张宁 李晓枫 齐陆燕
受保护的技术使用者:徐工集团工程机械股份有限公司科技分公司
技术研发日:2022.08.30
技术公布日:2022/12/16
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。