1.本发明涉及牙科器材磨床领域,尤其涉及一种应用于牙科器材的新型五轴联动的磨床。
背景技术:
2.牙科针器材是进行口腔手术的重要医用器械,主要用于牙齿的切削、打磨。牙科针在工作时的转速最高可达30万转/分钟,微小的尺寸偏差会产生很大的离心力,直接关系到患者的人身安全,所以提高牙科车针的加工精度,降低尺寸误差对保证其安全使用非常重要。
3.现有技术中,牙科针器材一般通过数控磨床对其进行加工,在生产时,需要手动将圆棒状的钨钢材料放置在夹盘上,然后通过高速转动状态下的磨砂盘对其进行磨削处理,由于牙科针的直径很小,传统移动模组的移动精度难以满足要求,造成牙科针的跳动误差和垂直度误差较大,从而制约高精密牙科针的批量生产;同时,细小的牙科针加工夹持过程中容易发生晃动,从而影响牙科针的加工精度;另外,传统磨床在对小尺寸的牙科针进行磨削加工时,通常需要手动进行上下料,费时费力,生产效率低下。
4.因此,现有技术存在缺陷,需要改进。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种降低加工误差、提高磨削精度,生产效率高的应用于牙科器材的新型五轴联动的磨床。
6.本发明的技术方案如下:一种应用于牙科器材的新型五轴联动的磨床,包括料盘、多轴取料机构、升降磨削机构、双轴移动机构、旋转台以及气动夹紧机构;
7.所述双轴移动机构与旋转台连接,所述旋转台上设有气动夹紧机构,所述多轴取料机构设于料盘上方,所述料盘上设有用于装载待加工棒料的放置孔,所述多轴取料机构可将放置孔内的棒料夹取至气动夹紧机构内进行夹紧,所述升降磨削机构设于气动夹紧机构上方,所述升降磨削机构可对气动夹紧机构上的棒料通过磨削加工成牙科针器材;
8.所述双轴移动机构包括y轴移动模组以及与所述y轴移动模组结构相同的x轴移动模组,所述y轴移动模组通过x轴移动模组与旋转台连接;
9.所述y轴移动模组包括y轴底座、y轴直线电机、y轴交叉滚柱导轨、y轴滑台以及y轴光栅尺,所述y轴直线电机设于y轴底座上,所述y轴直线电机与y轴滑台连接,所述y轴滑台底部的左右两侧设有y轴交叉滚柱导轨,所述y轴光栅尺水平设于所述y轴滑台侧端,所述y轴直线电机驱动y轴滑台在y轴交叉滚柱导轨进行移动并由y轴光栅尺实现检测定位;
10.所述升降磨削机构包括z轴支撑架、z轴移动模组、永磁电机、传动轴以及砂轮片,所述z轴移动模组设于z轴支撑架上,所述永磁电机设于z轴移动模组上,所述永磁电机的输出轴与传动轴连接,所述传动轴上设有用于对棒料进行磨削加工的砂轮片。
11.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述
旋转台位于y轴滑台上,所述旋转台的回转部上延伸有安装台,所述安装台上设有气动夹紧机构,所述气动夹紧机构通过气动作用对棒料进行夹紧或松弛。
12.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述旋转台上还设有辅助定位机构,所述旋转台的回转部上设有定位滑槽,所述定位滑槽内设有若干螺栓孔,所述辅助定位机构与螺栓孔连接。
13.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述辅助定位机构包括定位座、升降气缸、升降滑座、升降交叉滚柱导轨、圆棒托块、推动气缸、活动块以及辅助刀具,所述定位座与螺栓孔通过螺栓连接,所述升降气缸设于定位座上,所述升降气缸的活动端与升降滑座连接,所述升降滑座的背部设有升降交叉滚柱导轨,所述升降滑座顶部设有圆棒托块,所述圆棒托块上设有用于放置棒料的弧形槽,所述推动气缸设于升降滑座侧端,所述活动块与升降滑座通过销轴活动连接,所述推动气缸的活动端与活动块底部连接,所述活动块的顶部设有辅助刀具,所述推动气缸可通过伸缩作用带动活动块进行摆动,以将所述辅助刀具抵接在弧形槽的棒料进行辅助磨削加工。
14.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述多轴取料机构包括x轴滑台模组、y轴滑台模组、z轴滑台模组、旋转气缸、滑台气缸以及夹料块,所述y轴滑台模组设于料盘侧端,所述y轴滑台模组与z轴滑台模组连接,所述z轴滑台模组与x轴滑台模组连接,所述旋转气缸设于x轴滑台模组上,所述旋转气缸的旋转端设有滑台气缸,所述滑台气缸的伸缩端设有夹料块,所述夹料块上设有若干用于装设棒料的内夹孔,通过所述x轴滑台模组、y轴滑台模组、z轴滑台模组以及旋转气缸的移动作用,使所述夹料块的内夹孔对准料盘上棒料的位置,并通过所述滑台气缸的伸缩作用将棒料转移至所述内夹孔实现上料,所述x轴滑台模组、y轴滑台模组以及z轴滑台模组的结构相同。
15.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述x轴滑台模组上还设有感应限位装置,所述感应限位装置包括感应片、第一传感器以及第二传感器,所述感应片设于x轴滑台模组的移动滑台上,所述第一传感器及第二传感器分别设于x轴滑台模组的前后两端,所述第一传感器及第二传感器上分别设有用于感应片穿设的避让槽。
16.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述z轴移动模组包括z轴底座、z轴直线电机、z轴交叉滚柱导轨、z轴滑台以及z轴光栅尺,所述z轴直线电机设于z轴底座上,所述z轴直线电机与z轴滑台连接,所述z轴滑台底部的左右两侧设有z轴交叉滚柱导轨,所述z轴光栅尺水平设于所述z轴滑台侧端,所述z轴直线电机驱动z轴滑台在z轴交叉滚柱导轨进行移动并由z轴光栅尺实现检测定位。
17.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述升降磨削机构还包括有分水块,所述分水块内部设有入水流道,所述分水块上设有若干分水出口,所述分水出口与入水流道相连通。
18.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,所述砂轮片的直径为75~150mm,所述牙科针器材的直径为1~5mm。
19.采用上述各个技术方案,所述的应用于牙科器材的新型五轴联动的磨床中,还包括有防护机架,所述料盘、多轴取料机构、升降磨削机构、双轴移动机构、旋转台以及气动夹紧机构均设于所述防护机架内。
20.本发明的有益效果为:本发明的料盘上装设有待加工的钨钢棒料,然后通过多轴取料机构将棒料夹取至气动夹紧机构内进行自动上料夹紧,升降磨削机构可对气动夹紧机构上的棒料磨削加工成牙科针器材,双轴移动移动与旋转台连接以调整旋转台的xy轴方向位置,旋转台可转动气动夹紧机构的角度,便于升降磨削机构对牙科针的不同位置进行磨削加工;在牙科针加工过程中,x轴移动模组以及y轴移动模组可分别调节牙科针的xy轴方向位置,升降磨削机构中的z轴移动模组可调节砂轮片的z轴方向行进位置,本发明的x轴移动模组、y轴移动模组以及z轴移动模组均设置有直线电机、交叉滚柱导轨以及光栅尺,通过直线电机驱动滑台交叉滚柱导轨进行移动,并由光栅尺实现检测定位,防止移动偏差过大影响牙科针的磨削加工精度;辅助定位机构可对牙科针进行辅助支撑,防止其在加工过程中发生径向跳动,而且辅助定位机构上的辅助刀具也可对牙科针进行辅助磨削加工,有效提高牙科针的加工效率;整个加工过程自动化进行,减少人工干预,具有加工误差小,产品精度高等有益效果。
附图说明
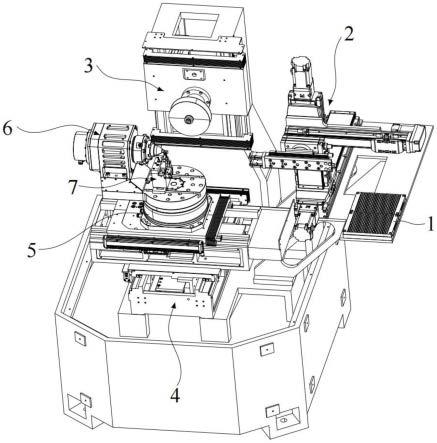
21.图1为本发明的整体结构示意图;
22.图2为本发明的防护机架结构示意图;
23.图3为本发明的双轴移动机构结构示意图;
24.图4为本发明的y轴移动模组结构示意图;
25.图5为本发明的升降磨削机构结构示意图;
26.图6为本发明的旋转台安装结构示意图;
27.图7为本发明的辅助定位机构结构示意图;
28.图8为本发明的多轴取料机构结构示意图;
29.图9为本发明的x轴滑台模组结构示意图。
具体实施方式
30.为使本专利申请实施方式的目的、技术方案和优点更加清楚,下面将结合本专利申请实施方式中的附图,对本专利申请实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本专利申请一部分实施方式,而不是全部的实施方式。基于本专利申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本专利申请保护的范围。因此,以下对在附图中提供的本专利申请的实施方式的详细描述并非旨在限制要求保护的本专利申请的范围,而是仅仅表示本专利申请的选定实施方式。基于本专利申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本专利申请保护的范围。
31.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“里面”、等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
32.如图1至图9所示,一种应用于牙科器材的新型五轴联动的磨床,包括料盘1、多轴
取料机构2、升降磨削机构3、双轴移动机构4、旋转台5以及气动夹紧机构6。
33.所述双轴移动机构4与旋转台5连接,双轴移动移动与旋转台5连接以调整旋转台5的xy轴方向位置,所述旋转台5上设有气动夹紧机构6,所述多轴取料机构2设于料盘1上方,所述料盘1上设有用于装载待加工棒料的放置孔10,所述多轴取料机构2可将放置孔10内的棒料夹取至气动夹紧机构6内进行夹紧,所述升降磨削机构3设于气动夹紧机构6上方,所述升降磨削机构3可对气动夹紧机构6上的棒料通过磨削加工成牙科针器材,在加工过程中,旋转台5可转动气动夹紧机构6的角度,以便于升降磨削机构3对牙科针的不同位置进行磨削加工。
34.如图1及图3所示,所述双轴移动机构4包括y轴移动模组41以及与所述y轴移动模组41结构相同的x轴移动模组42,所述y轴移动模组41通过x轴移动模组42与旋转台5连接。y轴移动模组41可带动旋转台5进行y轴方向上的移动,x轴移动模组42可带动旋转台5进行x轴方向上的移动。
35.如图3及图4所示,所述y轴移动模组41包括y轴底座411、y轴直线电机412、y轴交叉滚柱导轨413、y轴滑台414以及y轴光栅尺415,所述y轴直线电机412设于y轴底座411上,所述y轴直线电机412与y轴滑台414连接,所述y轴滑台414底部的左右两侧设有y轴交叉滚柱导轨413,所述y轴光栅尺415水平设于所述y轴滑台414侧端,所述y轴直线电机412驱动y轴滑台414在y轴交叉滚柱导轨413进行移动并由y轴光栅尺415实现检测定位。y轴直线电机412可消除中间环节引起的定位误差,定位精度高,y轴交叉滚柱导轨413与y轴滑台414之间为线接触,接触面积大,使得y轴滑台414运行更为平稳,降低移动时的误差,提高精度,y轴光栅尺415可对y轴滑台414的移动位置进行检测,当移动至预设位置时,可快速反馈至y轴直线电机412使其停止运行,从而避免移动行程过大影响牙科针的加工精度。
36.如图5所示,所述升降磨削机构3包括z轴支撑架31、z轴移动模组32、永磁电机33、传动轴34以及砂轮片35,所述z轴移动模组32设于z轴支撑架31上,所述永磁电机33设于z轴移动模组32上,所述永磁电机33的输出轴与传动轴34连接,所述传动轴34上设有用于对棒料进行磨削加工的砂轮片35。永磁电机33可通过传动轴34带动砂轮片35高速运转,以对牙科针进行磨削加工处理。z轴移动模组32可带动砂轮片35进行升降移动,以对牙科针的加工厚度进行调节。
37.如图1及图6所示,进一步的,所述旋转台5位于y轴滑台414上,所述旋转台5的回转部上延伸有安装台51,所述安装台51上设有气动夹紧机构6,所述气动夹紧机构6通过气动作用对棒料进行夹紧或松弛。在加工过程中,x轴移动模组42和y轴移动模组41可带动旋转台5分别进行xy轴方向移动,同时旋转台5可转动气动夹紧机构6的角度,以便于升降磨削机构3对牙科针的不同位置进行磨削加工。
38.如图6所示,进一步的,所述旋转台5上还设有辅助定位机构7,所述旋转台5的回转部上设有定位滑槽52,所述定位滑槽52内设有若干螺栓孔,所述辅助定位机构7与螺栓孔连接。辅助定位机构7可对牙科针进行辅助支撑,防止其在加工过程中发生径向跳动。辅助定位机构7可在定位滑槽52内移动位置,且与定位滑槽52上的螺栓孔通过螺栓连接,便于根据实际情况调节辅助定位机构7的位置。
39.如图7所示,进一步的,所述辅助定位机构7包括定位座71、升降气缸72、升降滑座73、升降交叉滚柱导轨74、圆棒托块75、推动气缸76、活动块77以及辅助刀具78,所述定位座
71与螺栓孔通过螺栓连接,所述升降气缸72设于定位座71上,所述升降气缸72的活动端与升降滑座73连接,所述升降滑座73的背部设有升降交叉滚柱导轨74,所述升降滑座73顶部设有圆棒托块75,所述圆棒托块75上设有用于放置棒料的弧形槽751,所述推动气缸76设于升降滑座73侧端,所述活动块77与升降滑座73通过销轴活动连接,所述推动气缸76的活动端与活动块77底部连接,所述活动块77的顶部设有辅助刀具78,所述推动气缸76可通过伸缩作用带动活动块77进行摆动,以将所述辅助刀具78抵接在弧形槽751的棒料进行辅助磨削加工。升降气缸72可带动升降滑座73进行升降移动,以对圆棒托块75移动至牙科针底部,便于圆棒托块75顶部的弧形槽751对牙科针进行托举,升降交叉滚柱导轨74的设置,可提高升降滑座73的移动精度,防止升降滑座73的移动位置误差过大影响牙科针的加工精度。在加工过程中,助刀具也可对牙科针进行辅助磨削加工,有效提高牙科针的加工效率。具体的,推动气缸76可带动活动块77翻转,以使辅助刀具78抵接在高速运转的牙科针上。需要说明的是,气动夹紧机构6不仅可对牙科针进行夹紧,还能带动其实现高速旋转。
40.如图8所示,进一步的,所述多轴取料机构2包括x轴滑台模组21、y轴滑台模组22、z轴滑台模组23、旋转气缸24、滑台气缸25以及夹料块26,所述y轴滑台模组22设于料盘1侧端,所述y轴滑台模组22与z轴滑台模组23连接,所述z轴滑台模组23与x轴滑台模组21连接,所述旋转气缸24设于x轴滑台模组21上,所述旋转气缸24的旋转端设有滑台气缸25,所述滑台气缸25的伸缩端设有夹料块26,所述夹料块26上设有若干用于装设棒料的内夹孔261,通过所述x轴滑台模组21、y轴滑台模组22、z轴滑台模组23以及旋转气缸24的移动作用,使所述夹料块26的内夹孔261对准料盘1上棒料的位置,并通过所述滑台气缸25的伸缩作用将棒料转移至所述内夹孔261实现上料。多轴取料机构2可将料盘1上的棒料夹取至气动夹紧机构6内进行上料,当牙科针完成加工后,多轴取料机构2还可将完成加工的牙科针进行夹取下料。具体的,x轴滑台模组21、y轴滑台模组22、z轴滑台模组23可分别带动夹料块26进行xyz三轴移动,旋转气缸24可带动夹料块26旋转,以将夹料块26的内夹孔261对准在棒料或牙科针的位置,然后通过滑台气缸25的伸缩作用将棒料或牙科针进行夹取。
41.如图9所示,进一步的,所述x轴滑台模组21上还设有感应限位装置,所述感应限位装置包括感应片211、第一传感器212以及第二传感器213,所述感应片211设于x轴滑台模组21的移动滑台上,所述第一传感器212及第二传感器213分别设于x轴滑台模组21的前后两端,所述第一传感器212及第二传感器213上分别设有用于感应片211穿设的避让槽。感应限位装置可控制x轴滑台模组21的移动位置,防止其移动行程超出预设范围。具体的,第一传感器212及第二传感器213分别为左移动行程最大值和右移动行程最大值,当感应片211移动至第一传感器212或第二传感器213的避让槽上时,可感应控制x轴滑台模组21停止移动。需要说明的是,x轴滑台模组21、y轴滑台模组22以及z轴滑台模组23的结构相同。
42.如图5所示,进一步的,所述z轴移动模组32包括z轴底座321、z轴直线电机322、z轴交叉滚柱导轨323、z轴滑台324以及z轴光栅尺325,所述z轴直线电机322设于z轴底座321上,所述z轴直线电机322与z轴滑台324连接,所述z轴滑台324底部的左右两侧设有z轴交叉滚柱导轨323,所述z轴光栅尺325水平设于所述z轴滑台324侧端,所述z轴直线电机322驱动z轴滑台324在z轴交叉滚柱导轨323进行移动并由z轴光栅尺325实现检测定位。z轴移动模组32和y轴移动模组41的结构及工作原理相同,故本实施例不再对z轴移动模组32的工作原理作过多赘述。
43.进一步的,所述升降磨削机构3还包括有分水块36,所述分水块36内部设有入水流道,所述分水块36上设有若干分水出口361,所述分水出口361与入水流道相连通。从入水流道进入的冷却水可通过分水出口361流出,以浇设在高速加工的牙科针上实现冷却。
44.进一步的,所述砂轮片35的直径为75~150mm,所述牙科针器材的直径为1~5mm。本实施例中,砂轮片35的直径为80mm,牙科针器材的直径为2.35mm。
45.如图2所示,进一步的,本磨床还包括有防护机架8,所述料盘1、多轴取料机构2、升降磨削机构3、双轴移动机构4、旋转台5以及气动夹紧机构6均设于所述防护机架8内。防护机架8的设置,可对本磨床内的各个机械运动机构进行封闭保护。
46.本发明的有益效果为:本发明的料盘上装设有待加工的钨钢棒料,然后通过多轴取料机构将棒料夹取至气动夹紧机构内进行自动上料夹紧,升降磨削机构可对气动夹紧机构上的棒料磨削加工成牙科针器材,双轴移动移动与旋转台连接以调整旋转台的xy轴方向位置,旋转台可转动气动夹紧机构的角度,便于升降磨削机构对牙科针的不同位置进行磨削加工;在牙科针加工过程中,x轴移动模组以及y轴移动模组可分别调节牙科针的xy轴方向位置,升降磨削机构中的z轴移动模组可调节砂轮片的z轴方向行进位置,本发明的x轴移动模组、y轴移动模组以及z轴移动模组均设置有直线电机、交叉滚柱导轨以及光栅尺,通过直线电机驱动滑台交叉滚柱导轨进行移动,并由光栅尺实现检测定位,防止移动偏差过大影响牙科针的磨削加工精度;辅助定位机构可对牙科针进行辅助支撑,防止其在加工过程中发生径向跳动,而且辅助定位机构上的辅助刀具也可对牙科针进行辅助磨削加工,有效提高牙科针的加工效率;整个加工过程自动化进行,减少人工干预,具有加工误差小,产品精度高等有益效果。
47.以上仅为本发明的较佳实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。