1.本发明涉及一种用于对可编程(programmable)机器人进行示教的机器人示教装置,具体涉及用于机器人编程、模拟以及控制的机器人示教装置(示教盒(teaching pendant))。
背景技术:
2.工业用可编程机器人为人所熟知。对这种机器人进行编程的常规方法,例如可使用将机械臂上的诸如末端执行器(end effector)及工具(tool)等机器人的特定部分通过所需路径从空间中的初始点引导至作为末端执行器的最终目的地的拾取位置(pick-up location)的方式。
3.机器人或外部控制装置中存储有有关从初始位置至最终位置的移动的信息。经这种学习会话,机器人能够重复上述多个步骤(procedures),并执行所要执行的任务。
4.只是,在这种机器人示教中,用于对机器人进行示教的示教盒的使用方法复杂困难,新手难以使用。因此,存在示教盒的实用性降低的问题。
技术实现要素:
5.技术问题
6.本发明的目的在于,提供能够根据示教作业的各种情况使用户直观地与机器人示教装置进行互动的机器人示教方法、程序以及装置。
7.另外,本发明的目的在于,提供以使用户与机器人示教装置交换消息的方式对机器人进行示教的用户界面。
8.另外,本发明的目的在于,提供能够在完成机器人示教作业所需的各个步骤中依次地与用户进行互动的用户界面。
9.另外,本发明的目的在于,提供能够事先预测并预防用户在机器人示教作业中频繁发生的失误的用户界面。
10.另外,本发明的目的在于,提供能够使用户了解并修复在机器人的驱动和控制中发生的错误情况的用户界面。
11.本发明旨在解决的技术问题不限于上述的技术问题,本领域技术人员能够通过以下记载清楚地理解未提及的其他多个技术问题。
12.技术方案
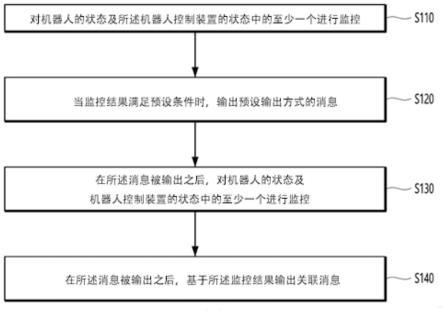
13.本发明旨在解决上述技术问题,提供一种对机器人进行示教的机器人示教方法。具体地,本发明提供一种机器人示教方法,包括如下步骤:机器人示教装置输出示教界面以对所述机器人的操作进行示教;对所述机器人与机器人示教装置的通信信息、所述机器人的状态信息以及所述机器人示教装置的状态信息中的至少一个进行监控;以及当所述监控结果满足预设条件时,向所述示教界面输出与所述监控结果相关的消息,其中,所述消息包括根据所述监控结果来引导向所述机器人示教装置输入信息的文字和图像中的至少一个。
14.在一实施例中,在输出所述消息的步骤中,所述消息的内容可根据所述信息的输入而改变。所述消息可以重叠于所述示教界面的执行画面的方式被输出,在所述消息的内容改变的过程中,保持所述示教界面的执行画面。
15.在一实施例中,所述预设条件可以是所述机器人的操作及控制中的至少一个发生了差错或被预测会发生差错。
16.在一实施例中,所述预设条件可以是需要输入用于所述机器人的操作及控制中的至少一个的信息的状态。
17.在一实施例中,本发明进一步包括如下步骤:所述机器人示教装置的示教界面显示包括所述机器人的动作信息的模拟区域及接收有关所述机器人的控制的输入的控制区域,其中,所述消息以与所述模拟区域及所述控制区域中与所述预设条件有关的区域相关联的方式被显示。
18.在一实施例中,所述消息可包括接收用于与所述预设条件有关的所述机器人的操作、控制以及设置中的至少一个的信息的输入区域。
19.在一实施例中,本发明进一步包括如下步骤:所述机器人示教装置通过所述输入区域从用户接收信息;所述机器人示教装置利用通过所述输入区域接收到的信息对所述机器人的状态及所述机器人示教装置的状态中的至少一个进行监控;以及基于在输出所述消息之后执行的监控结果来输出关联消息。
20.在一实施例中,所述预设条件为感测到所述附加装置安装于所述机器人,所述消息可包括提示用户使所述机器人以特定的动作进行运动的文字和图像中的至少一个。
21.在一实施例中,本发明进一步包括如下步骤:在输出所述消息之后,所述机器人示教装置对所述机器人的操作进行监控;以及所述机器人示教装置基于所述动作监控结果来进行与所述附加装置相关的设置。
22.另外,本发明提供一种机器人示教装置,其包括:显示部,用于输出示教界面;通信部,用于与机器人之间收发数据;以及控制部,对所述机器人与机器人示教装置的通信信息、所述机器人的状态信息以及所述机器人示教装置的状态信息中的至少一个进行监控,当所述监控结果满足预设条件时,控制所述显示部以使所述示教界面显示与所述监控结果相关的消息。所述消息可包括根据所述监控结果来引导向所述机器人示教装置输入信息的文字和图像中的至少一个。
23.另外,本发明提供一种机器人示教系统,其具备执行所述机器人示教方法的机器人及机器人示教装置。
24.有益效果
25.根据上述的本发明,具有以下多种效果。
26.根据本发明,用户通过本发明的用户界面了解情况进程并同时进行示教作业,因此,不会遗漏完成机器人示教作业所需的信息及行为。
27.另外,根据本发明,能够在显示消息的区域内执行用户需最优先进行的所有的作业,因此,能够提高用户的作业集中度及作业速度。
28.另外,根据本发明,通过用户与机器人示教装置之间的互动,在机器人示教作业的各步骤中,依次地实现对于机器人的监控并解决问题,因此,新手也能够轻松地进行机器人的示教。
29.另外,根据本发明,机器人示教装置通过与用户的互动向用户提供安装附加装置所需的信息,并且从用户收集设置附加装置所需的信息,因此,用户无需关于用于安装于机器人的附加装置的具体的知识,就能够轻松地将附加装置安装于机器人。
30.另外,根据本发明,当达到用户频繁发生失误的作业步骤时,使用户对此了解,并且使用户通过最少的作业就能够预防失误,因此,能够使机器人错误次数最少化并缩短用户的作业时间。
31.另外,根据本发明,在一个消息中提供机器人操作及控制中发生的错误情况及用于修复错误的界面,因此,用户能够在了解到错误时,立即实施修复错误的行为。
32.另外,根据本发明,通过与机器人示教装置的重复的互动过程,无需额外的在先(指南、教育课程等)学习,就能够自行提高用户的机器人使用熟练度。
33.本发明的效果不限于上述的效果,本领域技术人员能够通过以下记载清楚地理解未提及的其他的多个效果。
附图说明
34.图1是概略地示出本发明的一实施例的机器人示教系统的图。
35.图2是示出本发明的一实施例的机器人示教装置(示教盒)具备的多个构成要素的框图。
36.图3是示出本发明的一实施例的机器人示教装置(示教盒)的主画面的概念图。
37.图4是用于对受本发明的一实施例的机器人示教装置的控制的可编程机器人的操作进行说明的概念图。
38.图5是示出输出本发明的消息的一实施例的顺序图。
39.图6和图7是示出输出本发明的消息的一实施例的概念图。
40.图8a至图10c是示出根据本发明的一实施例将消息用于安装附加装置的一实施例的概念图。
41.图11是示出根据本发明的一实施例将消息用于用户首次执行的功能的一实施例的概念图。
42.图12是示出根据本发明的一实施例利用消息以预防用户常犯的失误的一实施例的概念图。
43.图13至图17是示出根据本发明的一实施例将消息用于修复机器人错误的一实施例的概念图。
具体实施方式
44.参照附图和后述的多个实施例,本发明的优点、特征以及实现它们的方法将更加清楚。然而,本发明不限于以下公开的多个实施例,而是能够实现为不同的多种形态,本发明的实施例只是用于更加完整地公开本发明,并向本领域技术人员完整地介绍本发明的范畴,本发明仅由权利要求的范畴定义。
45.本说明书中使用的术语用于对多个实施例进行说明,而不是旨在限制本发明。在本说明书中,除非特意提及,否则单数的表述就包括复数的表述。说明书中使用的“包括(comprises)”及/或“包括的(comprising)”不排除存在或添加除了所提及的构成要素以外
的一个以上的其他的构成要素。在说明书全文中,相同的附图标记指代相同的构成要素,“及/或”包括所涉及的多个构成要素中的各个及一个以上的所有的组合。虽然使用“第一”、“第二”等对多种构成要素进行描述,但是这些构成要素不限于这些术语。这些术语仅用于区分一个构成要素与另一个构成要素。因此,在本发明的技术思想的范围内,后述的第一构成要素也可以是第二构成要素。
46.除非另有定义,否则本说明书中使用的所有的术语(包括技术术语和科学术语)就可以本领域技术人员共同理解的含义使用。另外,除非另作明确定义,否则通常使用的词典中定义的术语就不应当被理想地或夸大地解释。
47.以下,参照附图,对本发明的优选实施例进行更加详细说明。在对本发明进行说明时,为了方便完整地理解,对附图中的相同的构成要素使用了相同的附图标记,并且对相同的构成要素的重复说明进行了省略。
48.可使用三种方式来进行机器人示教,所述三种方式可包括线下编程(offline programming)、线上编程(online programming)、直接示教(direct teaching)方式。线下编程作为基于模拟器来操作的编程方式,主要在执行路径生成及检验时使用,是通过以太网控制自动化技术主控制器实施的编程方式。
49.线上编程作为利用机器人示教装置的方式,主要用于机器人运动命令、路径生成/重复作业,是通过机器人示教装置与机器人的有线连接/无线连接来实现的方式。
50.直接示教是用户(或操作者)直接操控机器人学习路径的方法,会需要控制算法的支持。其作为能够使用户直观地决定机器人的目标轨迹的系统,是用户抓住机器人的末端部分并直接向机器人施加力和力矩以根据自己的意愿使机器人运行的方式。因此,是使用户能够轻易生成机器人的目标轨迹信息,并且在机器人记住该路径之后,在自动运行时,对其进行追踪并控制的方式。
51.本发明的一实施例的机器人示教装置可包括示教盒(teaching pendant;tp)作为用于控制机器人的用户界面装置。示教盒作为用于工业用装备或机器人的装备,可主要在无法使用显示器和鼠标的工业现场及无需特别的操作的自动化装备上使用触摸板(或按键)和显示屏(例如,可包括lcd屏、led屏)以实现为平板pc形态,以方便用户,并且可以与机器人有线或无线连接的方式使用。
52.机器人示教系统
53.图1是概略地示出本发明一实施例的机器人示教系统的图。如图1所示,本发明的一实施例的机器人示教系统可(a)基于线下编程及(b)基于线上编程来编程。本发明的一实施例的机器人示教系统可包括机器人示教装置100(例如,可以是示教盒)、主控制器以及机器人300中的至少一个。本发明在基于线上编程的机器人示教系统及基于线下编程的机器人示教系统中均可使用。另外,所述机器人示教系统作为基于示教来定义系统的术语,也可基于机器人,被称为一个机器人系统。
54.参照图1,在本发明一实施例的线下编程控制中,机器人示教装置100和主控制器200可向机器人300的控制系统(未示出)传递控制信号或编程数据以驱动机器人300。机器人300的控制系统可以向用于驱动机器人的各个部分的驱动单元施加电流以执行与编程对应的动作的方式进行控制。
55.本发明的一实施例的机器人示教装置100可以是基于触摸的示教盒。即,可在用于
线上编程的示教盒的功能上搭载模拟器以提供线下编程功能。机器人示教装置100可搭载基于开源物理引擎(ode)的机器人/传感器/环境建模移动机器人及仿人ros(软件)来实现。软件可在windows或linux等多种运行系统中运行。机器人示教装置100可通过模拟器对防碰撞算法、最优路径计算算法进行检验。
56.机器人示教装置100可包括机器人300的末端执行器以用于控制机器人300的多个部分的多个功能以及多个动作。为此,机器人示教装置100可包括存储部,所述存储部不仅存储对于机器人300操作的周边环境及由机器人300操控的多个物体的相关信息,还存储预先存储的有关机器人的操作及多个功能。机器人示教装置100能够在机器人300的编程过程中与机器人300进行通信,并且能够控制机器人300。另外,还能够搜索机器人300的多个动作的模式及预先编程的场景。因此,这种场景或机器人相关信息可在用于新的测试的机器人进行再编程所需的设置内执行不同任务时使用。
57.主控制器200可以是利用能够快速提供物联网(iot)服务的网关(internet gateway of things;igot)通过以太网通信实时地控制分散的多个传感器及多个驱动器的现场总线。其中,igot作为能够快速提供物联网服务的网关,能够利用多个基于作为现场总线的rs485及can的传感器实现工业用物联网,并且能够利用以太网控制自动化技术(ethercat)进行实时分散控制。即,主控制器200可以是支持以太网控制自动化技术的基于linux的实时控制器。不仅能够通过主控制器200来确保工业用控制器具有的稳定性和高性能,而且还能够利用实时运行系统及以太网控制自动化技术主软件以降低产品的拥有及维护成本。主控制器200可与机器人示教装置100通过usb连接,并且从机器人示教装置100接收编程数据或控制信号以驱动机器人。主控制器200可包括科技嵌入式平台(science and technology embedded platform;step)。
58.在线上编程控制中,机器人示教装置100可利用以太网控制自动化技术对机器人300进行线上控制。即,根据本发明的一实施例,能够实现与实时机器人控制器集成的机器人示教装置100,以将执行线上编程与线下编程集成。
59.机器人示教装置(示教盒)
60.图2是示出本发明的一实施例的机器人示教装置(示教盒)具备的多个构成要素的框图,图3是示出本发明的一实施例的机器人示教装置(示教盒)的主画面的概念图。
61.参照图2,本发明的一实施例的机器人示教装置100可包括显示部110、用户输入部120、控制部130、存储部140、通信部150以及模拟部160。
62.显示部110能够显示在机器人的编程过程中,将由用户执行的与多个编程步骤有关的多个菜单,及/或在机器人的编程、实际操作或进行测试的过程中,显示表现出所述机器人的形状的电脑成像(例如,3d cad图像)。显示部110能够显示由时间轴及表示机器人的多个部分中的至少一个的动作的程度值的动作信息轴构成的图表。另一方面,显示部110能够显示用于辅助用户的作业的多种消息。将在后面对此进行说明。
63.用户输入部120能够向对于机器人的控制系统输入编程的指令。用户输入部120能够从用户接收指令,其可包括触摸屏。触摸屏能够通过触摸笔或用户的手等接收用户输入。触摸屏将机器人的3d成像与用于将机器人的特定部分以任意的位置进行定位和定向(positioning and orienting)的多种图标一同显示,并且能够接收对于多个图标的点击。
64.控制部130是用于对机器人进行编程及控制的处理器。其可由硬件处理器构成。控
制部130能够根据从用户输入部120接收的指令来生成向机器人输入的编程代码。或者,能够生成用于控制机器人的控制信号。控制部130能够基于机器人的各个部分的动作或坐标值,根据时间的流逝进行分析,以生成由时间轴和动作程度值构成的图表。另外,既能够利用图表对时间、对象机器人部分以及路径点进行特定,以通过对应部分的动作程度值的变化来改变路径点的位置,又能够添加新的路径点。控制部130能够感测机器人的周边环境,例如障碍物及禁止区域等,以计算出机器人的最优路径。另外,能够通过多个路径点的多个序列或通过空间上的路径来移动机器人的一个以上的结合部或工具以获取机器人的位置或空间区域的详细坐标。
65.为此,控制部130上基本地可搭载对于各个臂的逆动态控制算法、阻抗控制算法、柔顺控制算法、根据臂操作的碰撞检测及躲避算法、对象(object)阻抗控制算法以及内力(internal force)阻抗控制算法,并且可通过模拟部160的模拟来检验这些算法。
66.另外,控制部130能够控制显示部110以根据各个菜单及图标的点击来显示前一个及后一个菜单及图标。控制部130可至少在机器人的编程过程中,与多个特定动作相关联,获取说明有关机器人的喜爱动作、运动以及其他的多个特征的预先编程的模板(templates)的访问权限。此时,模板可对机器人的不同的多个操作进行定义,以优化机器人的后续编程。所述模板可存储于存储部140。
67.存储部140能够存储有关机器人的编程及多个动作的信息,还能够存储机器人移动过程中需要躲避的障碍物信息及/或诸如空间上的禁止区域等有关机器人周边的信息。其可包括ram、rom等快闪存储器及/或硬存储器等非易失性存储器。存储部140能够存储表示工具的初始位置的信息、在初始位置上的工具的激活/触发参数、工具的最终位置、在最终位置上的激活/触发参数以及有关初始位置与最终位置之间的空间上的路径的信息。
68.通信部150能够通过附着于实际的机器人的传感器等接收机器人的动作信息或位置信息等机器人相关信息。其可通过通信处理器来实现。另外,通信部150能够使机器人之间收发数据。
69.模拟部160能够基于从实际的机器人接收到的信息或来自机器人示教装置的外部传感器的信息将实际的机器人的动作生成为电脑成像以进行模拟。另外,不同于实际的机器人,可根据控制部130生成的编程来生成机器人的电脑成像,以对机器人的动作进行模拟。这种模拟电脑成像可被传输到显示部110并显示。
70.即,本说明书中说明的模拟信息可包括描述机器人的实际动作的信息和描述机器人的模拟动作的信息中的至少一个。
71.描述机器人的实际动作的信息可通过静态图像或动态图像中的至少一个来显示。进一步地,描述机器人的实际动作的信息可以是与机器人的外观对应并且描述机器人的各个关节(或关节的位置)的图像。
72.同样地,描述机器人的模拟动作的信息可通过静态图像或动态图像中的至少一个来显示。进一步地,描述机器人的模拟动作的信息可以是对于当机器人实际运动时预想到的机器人的外观及关节的位置的图像。
73.在本发明中,为了方便说明,对于由机器人示教装置执行的功能或过程,以诸如“机器人示教装置输出信息”等以“机器人示教装置”为主体的方式来表示。其中,“在控制下”可表示通过机器人示教装置与主控制器及机器人之间的通信来收发数据并基于此执行
一系列过程。
74.另外,“在控制下”实际上可表示机器人示教装置的控制部能够基于由本发明的机器人示教装置提供的命令语句、程序或功能来执行后述的功能。
75.本发明的机器人示教装置能够在显示部110上显示多种画面信息。
76.具体地,参照图3,显示部显示与机器人示教装置100能够执行的功能有关的多个图标111。用户可通过触摸所述多个图标中的一个来执行特定功能。
77.另一方面,显示部110能够输出对于机器人的电脑成像112。其中,电脑成像112是有关机器人的驱动和控制的模拟信息。所述电脑成像112是基于用户输入的信息,将模拟部160或主控制器200执行的模拟结果图像化而成的。在本说明书中,将显示所述电脑成像112的区域称为模拟区域。
78.所述电脑成像以与实际的机器人相同的形状被显示,当所要控制的机器人的种类改变时,电脑成像112也可改变。机器人示教装置100能够利用所述电脑成像112向用户提供根据机器人的形状及特定控制命令的机器人的预想动作。即,电脑成像112不仅包括静态影像,还包括动态影像。
79.另外,机器人示教装置100可强调显示所述电脑成像112的一部分112’,从而使用户了解机器人的特定部位存在问题。将在后面对利用电脑成像112的实施例进行说明。
80.另一方面,在显示部110上能够显示可输入项目的信息的区域113。
81.另一方面,在显示部110上能够显示多个可选择向机器人下达的控制命令的种类的标签114。用户可触摸多个标签中的一个以选择向机器人下达的控制命令的种类。需向控制命令输入窗115输入的信息可根据用户选择标签的种类而不同。
82.在本说明书中,将多个图标111、能够输入项目的信息的区域113、上述多个标签114以及输入窗115称为控制区域。因此,本发明的机器人示教装置的显示部输出的画面信息包括模拟区域和控制区域。
83.上述显示部上显示的画面信息仅为本发明的一实施例,显示部上显示的信息不限于以上列出的内容。
84.机器人的操作
85.图4是用于对受本发明的一实施例的机器人示教装置的控制的可编程机器人的操作进行说明的概念图。
86.机器人可包括多个单个臂部,并且相邻的臂部通过各个结合部而互连。所述结合部中的至少一部分可包括可驱动的驱动单元。另外,机器人可包括用于控制这种驱动电路的控制系统。所述结合部可包括安全闸,并且可包括相对于电极旋转轴旋转的环状部(annular member)。
87.机器人可包括用于对从机器人示教装置接收到的指令进行解码的解码器,并且可包括用于感测与机器人的各个部分的位置及动作相关的信息的传感器(例如,力/力矩传感器(f/t sensor)、位置传感器、视觉传感器(vision sensor))。这种传感器能够感测机器人的周边。另外,可包括用于对所述动作相关信息进行编码的编码器。
88.机器人能够执行至少以下操作。能够执行取放操作(pick-and-place operation)、锉削操作(filing operation)、钻孔操作(peg-in-hole operation)、装配操作(assembly operation)、堆垛操作(palletizing operation)、直积示教、去毛刺操作
(deburring operation)、喷射、焊接操作(spraying,welding operation)以及人机互动(human interaction)。这可通过基本功能来执行,可基于定位(specification of position)、移动、追踪、触发器(triggers)以及事件/动作等实现。
89.参照图4,机器人300包括多个关节320、330、340、350、360、370以实现多自由度的动作。在图4中,作为多自由度协同机器人的一例,示出了利用六个关节320、330、340、350、360、370以具有六自由度的机器人300。
90.第一关节320可旋转地结合于底座310的上部,并且第一关节320以z轴(基于图4为垂直方向)为中心旋转。第一关节320的一端面(与底座310对置的面)与另一端面(与第二关节330对置的面)位于彼此垂直的平面。第二关节330可旋转地结合于第一关节320的另一端部。第一关节320的一端面与另一端面位于彼此垂直的平面,因此,第二关节330以垂直于第一关节320的旋转轴的轴为中心旋转。第二关节330的一端面(与第一关节320对置的面)与另一端面(与第三关节340对置的面)位于彼此平行或一致的平面。
91.第三关节340可旋转地结合于第二关节330的另一端部。第二关节330的一端面与另一端面位于彼此平行或一致的平面,因此,第三关节340以平行于第二关节330的旋转轴的轴为中心旋转。第三关节340的一端面(与第二关节330对置的面)与另一端面(与第四关节350对置的面)位于彼此垂直的平面。
92.第四关节350可旋转地结合于第三关节340的另一端部。第三关节340的一端面与另一端面位于彼此垂直的平面,因此,第四关节350以垂直于第三关节340的旋转轴的轴为中心旋转。第四关节350的一端面(与第三关节340对置的面)与另一端面(与第五关节360对置的面)位于彼此垂直的平面。
93.第五关节360可旋转地结合于第四关节350的另一端部。第四关节350的一端面与另一端面位于彼此垂直的平面,因此,第五关节360以垂直于第四关节350的旋转轴的轴为中心旋转。第五关节360的一端面(与第四关节350对置的面)与另一端面(与第六关节370对置的面)位于彼此垂直的平面。
94.第六关节370可旋转地结合于第五关节360的另一端部。第五关节360的一端面与另一端面位于彼此垂直的平面,因此,第六关节370以垂直于第五关节360的旋转轴的轴为中心旋转。第五关节360的一端面(与第四关节350对置的面)与另一端面位于彼此垂直的平面。
95.在第六关节370的另一端部安装附加装置(未示出)。附加装置根据机器人300执行的作业等而存在多个种类,第六关节370的另一端部能够更换安装多种附加装置。
96.所述附加装置可以是用于机器人的作业的工具(tool)或安装于所述机器人的传感器等。
97.本发明能够通过上述机器人示教装置来控制机器人。上述机器人仅为本发明的一实施例,能够根据本发明来控制的机器人的结构不限于上述机器人。
98.以下,对能够根据示教作业的各种情况使用户直观地与机器人示教装置进行互动的机器人示教方法进行具体说明。
99.图5是示出输出本发明的消息的一实施例的顺序图,图6和图7是示出输出本发明的消息的一实施例的概念图。
100.本发明的机器人示教装置根据不同情况,通过与用户进行互动来帮助用户顺利地
进行作业。为此,参照图5,本发明的机器人示教装置对所述机器人与机器人示教装置的通信信息、机器人的状态以及所述机器人示教装置的状态中的至少一个进行监控(s110)。
101.此时,可在所述监控(s110)之前,执行机器人示教装置输出示教界面以对所述机器人的操作进行示教的步骤。只是,本发明不限于此,所述监控(s110)可先于所述输出示教界面的步骤被执行。
102.所述示教界面作为机器人示教装置输出的用于与用户进行互动的界面,包括图形用户界面、音频界面等。更具体地,所述示教界面可被解释为将参照图3在上文进行描述的模拟区域和控制区域全部包括。所述机器人与机器人示教装置的通信信息可以是有关利用有线或无线信号的所述机器人与机器人示教装置的通信连接的信息。以下,在本说明书中,为了方便说明,主要以无线通信为示例进行说明。
103.其中,机器人的状态信息包括机器人的当前设置、机器人的驱动状态、是否安装附加装置、通信状态、机器人的当前姿势中的至少一个,并且利用从主控制器200及机器人300接收到的信息进行监控。
104.机器人示教装置100的状态信息包括对于机器人示教装置的用户输入值、当前执行的功能、功能执行历史、当前显示的画面信息以及对于机器人示教装置的用户的使用模式中的至少一个,并且可通过控制部130周期性地进行收集。
105.即,机器人示教装置100对与主控制器及机器人之间收发的数据、用户输入的数据、机器人示教装置内生成的数据进行监控。
106.当监控结果满足预设条件时,在显示部110上输出预设输出方式的消息(s120)。作为这类例,当所述监控结果满足预设条件时,所述示教界面输出与所述监控结果相关的消息。
107.所述预设条件可设置有多个,多个条件可大致分为三种。具体地,所述预设条件可由作业建议条件、作业警告条件、机器人错误修复条件组成。将在后面对各个条件及其实施例进行说明。
108.机器人示教装置周期性地对机器人的状态信息及机器人示教装置的状态信息进行监控,以判断是否满足所述预设条件。
109.所述消息可包括根据所述监控结果来引导向所述机器人示教装置输入信息的文字和图像中的至少一个。
110.例如,所述消息可根据作为输出所述消息的原因的预设条件的种类而包括不同的画面信息。具体地,所述消息可仅包括有关机器人的状态及机器人示教装置的状态的信息。机器人示教装置能够基于对于所述消息的用户输入而改变所述消息中显示的信息。例如,当所述消息包括图像时,机器人示教装置能够基于对于显示所述消息的区域的用户输入而显示由所述图像变形后的图像。如上所述,本发明能够通过所述消息使用户对示教作业的进行情况实时地进行监控。
111.不同与此,所述消息可包括用于输入机器人的驱动和控制所需的信息的输入区域。可向所述输入区域输入的信息的种类可根据所述预设条件而不同。例如,当所述消息因安装附加装置而产生时,所述消息可包括输入有关附加装置的设置值的输入区域。所述输入区域可形成为按键形态以便用户输入。例如,所述消息包括至少一个按键,并且各个所述按键可匹配机器人的驱动和控制所需的信息。各个所述按键可包括提示与其匹配的信息的
文字和图像。机器人示教装置能够基于向显示所述按键的区域下达的用户输入来执行有关所述机器人的驱动和控制的作业。
112.通过上述消息所包含的画面信息,机器人示教装置能够通过消息来引导用户执行特定行为。具体地,机器人示教装置通过消息来引导用户触摸消息的一部分,或触摸显示在显示部的画面信息的一部分,或对机器人进行直接操作。
113.在一实施例中,机器人示教装置在消息内显示输入区域,以使用户触摸消息的一部分或输入设置值。在另一实施例中,机器人示教装置在消息内显示提示消息,以使用户触摸特定画面信息。在另一实施例中,机器人示教装置在消息内显示动态影像或静态影像,以供用户执行特定行为。
114.如上所述,上述消息包括在提示示教作业情况的同时执行示教作业中的至少一部分的输入区域。由此,本发明的机器人示教装置与用户进行互动。
115.另一方面,所述消息400的显示位置可根据与消息关联的问题的种类而不同。
116.具体地,消息的位置可以与发生问题的功能关联的菜单、图标、画面信息关联的方式被显示。其中,“消息以与特定画面信息关联的方式被显示”意味着以使用户了解特定画面信息与消息具有关联性的方式表示。例如,“消息以与特定画面关联的方式被显示”可包括显示在特定画面信息的预定距离以内,或强调地显示特定画面信息,或消息与特定画面信息通过连接部连接。不仅限于此,当用户能够了解特定画面信息与消息具有关联性时,即可认为“消息以与特定画面信息关联的方式被显示”。
117.另一方面,输出消息的时间点可根据与消息关联的问题的种类而不同。
118.在一实施例中,机器人错误修复消息可在错误发生时立即被输出,作业警告条件也可在该条件被满足时立即输出消息。
119.不同与此,作业建议消息的场合,即便机器人示教装置满足该条件也可不立即输出消息,而是另显示能够输出消息的图标。当用户触摸所述图标时,输出消息。
120.另外,在输出所述消息的步骤(s120)中,所述消息的内容可根据所述信息输入而改变。像这样,所述消息可包括用户与机器人示教装置之间收发的信息形态的内容,因此,可将所述消息定义为ping-pong消息。
121.此时,所述消息以重叠于所述示教界面的执行画面的方式被输出,在所述消息的内容改变的过程中,保持所述示教界面的执行画面。更具体地,随着在保持一个执行画面的同时依次输出所述ping-pong消息,所述机器人示教装置能够在与该执行画面关联的示教步骤中基于监控结果与用户进行互动。
122.为了这种消息的内容改变,根据需要,在所述消息被输出之后,机器人示教装置对机器人的状态和机器人示教装置的状态中的至少一个进行监控(s130)。
123.机器人示教装置通过所述消息包括的输入区域从用户接收机器人的驱动和控制所需的信息之后,对机器人的状态和机器人示教装置的状态进行监控,并判断引起消息输出的问题是否得到解决。
124.基于所述监控结果,所述机器人示教装置输出关联消息(s140)。
125.在本说明书中,为了方便说明,在所述消息被显示之后,将根据对于机器人及机器人示教装置的监控结果而显示的消息称为关联消息。机器人示教装置根据在所述消息被输出之后,与所述消息关联的问题是否被解决来决定是否输出关联消息.
126.另一方面,关联消息可被依次地输出多个,机器人示教装置根据在特定关联消息被输出之后,与所述特定关联消息关联的问题是否被解决来决定是否输出附加的关联消息。即,机器人示教装置输出关联消息,直到与初期显示的消息关联的问题全部得到解决。
127.所述关联消息是用于向用户提示问题是否被解决或进行附加提示的消息。当在用户基于消息而执行特定行为之后问题得到解决时,机器人示教装置会显示提示问题被解决的关联消息。另一方面,当用户基于消息执行特定行为时,机器人示教装置可输出引导用户进行下一个行为的关联消息。此时,每当用户的行为结束时可显示关联消息。即,可显示关联消息,直到问题得到解决。
128.另一方面,所述关联消息可与所述预设形式的消息相同地包括用于接收机器人的驱动和控制所需的信息的输入区域。所述输入区域与所述预设形式的消息包括的输入区域相同,因此省略其具体说明。
129.如上所述,根据本发明,用户通过本发明的用户界面了解情况进程并同时进行示教作业,因此,不会遗漏完成机器人示教作业所需的信息及行为。以下,参照附图对本发明的一实施例进行具体说明。
130.例如,如图6所示,机器人示教装置100对机器人的通信状态进行监控,当机器人与机器人示教装置之间无法通信时,输出预设形式的消息400。机器人示教装置将有关机器人的通信状态的消息显示在连接状态图标111的周边。另一方面,在消息被显示时,机器人示教装置能够强调地显示特定图标401,以提示消息与特定图标的关联性。
131.在另一实施例中,参照图7,机器人示教装置可显示连接消息400与特定图标111的连接部402。
132.在另一实施例中,虽未示出,但是机器人示教装置将有关安装于机器人的附加装置的消息显示在模拟区域。在另一实施例中,当机器人发生错误时,机器人示教装置在模拟成像上对发生错误的位置进行强调,并在被强调的位置的周边显示消息。
133.以下,参照附图对输出消息的条件及其相关的多种实施例进行说明。在本说明书中,将有关本发明的多个实施例分类为作业建议、作业警告、机器人错误以进行说明,但是本发明不应当被解释为限于上述分类。
134.作业建议
135.本发明提供能够在完成机器人示教作业所需的各个步骤中依次地与用户进行互动的用户界面。
136.图8a至图10c是示出根据本发明的一实施例将消息用于安装附加装置的一实施例的概念图,图11是示出根据本发明的一实施例将消息用于用户首次执行的功能的一实施例的概念图。
137.本发明的机器人示教装置向用户输出用于对作业提出建议的消息。具体地,机器人示教装置输出提醒用户在当前情况下需最优先进行的作业的消息。
138.其中,输出消息的条件可包括感测到新的附加装置安装于机器人、用户首次执行特定功能、用户执行已执行次数在预设次数以内的功能、在执行特定功能时出现用户请求中的至少一个。以下,对多个有关上述条件的实施例进行具体说明。
139.当在机器人上安装附加装置时,机器人向机器人示教装置传输与此相关的数据。当机器人示教装置感测到在机器人上安装了附加装置时,机器人示教装置会输出消息。
140.此时,可在所述机器人的附加装置被安装的时间点,在所述机器人示教装置的示教界面上显示所述消息。为此,所述机器人示教装置对所述附加装置的安装进行监控,并且响应所述附加装置的安装,输出所述消息。此时,所述消息可包括用于所述附加装置的校准的设置信息。因此,用户可根据所述消息的引导来执行所述附加装置的校准。
141.其中,消息的内容可根据安装的附加装置的种类而不同。
142.在一实施例中,参照图8a至图8c,当感测到在机器人上安装了力/力矩传感器(f/t传感器)时,机器人示教装置输出提示感测到新的装置的消息400。当在所述消息400被输出之后经过预设时间或感测到对于所述消息400的触摸输入时,机器人示教装置输出提示用户使机器人以特定动作进行运动的消息404。其中,所述消息404可包括动态影像。
143.在所述消息404被输出的状态下,机器人示教装置对机器人具备的传感器感测到的值进行监控,并利用监控到的值设定机器人的坐标系。
144.此时,显示所述消息404,直到用户使机器人以特定的动作运动,并可显示在模拟成像的周边。
145.另外,可强调显示403模拟成像的整体区域中与设置有传感器的位置对应的区域。
146.另一方面,当无法利用所述监控到的值来设置机器人的坐标系时,机器人示教装置输出提示重新安装附加装置的关联消息。与此同时,可将用于辅助附加装置的安装的动态影像一同输出。
147.另一方面,机器人示教装置在完成机器人的坐标系设置之后,显示对此进行提示的关联消息405。
148.在另一实施例中,参照图9a至图9c,当感测到在机器人上安装了视觉传感器时,机器人示教装置输出利用视觉传感器对特定位置进行感测的消息406。在所述消息406被输出的状态下,机器人示教装置对机器人具备的视觉传感器感测到的值进行监控,并利用监控到的值进行校准。
149.此时,显示消息,直到通过视觉传感器感测到特定位置,并且可显示在模拟成像的周边。
150.另一方面,机器人示教装置在无法利用所述监控到的值进行校准时,输出使视觉传感器对其他的位置进行感测的关联消息。与此同时,可将用于辅助附加装置的安装的动态影像一同输出。
151.在另一实施例中,参照图10a至图10c,当虽然感测到安装了附加装置,但是无法感测所安装的附加装置的种类时,机器人示教装置输出使用户选择所安装的附加装置的种类的消息407。
152.具体地,机器人示教装置将认为由用户安装的附加装置的形状通过二维图像或三维图像显示。当通过三维图像显示有关附加装置的影像时,如果存在对于所述三维图像的触摸输入,机器人示教装置则显示从其他的角度观察的图像。由此,本发明使用户即便不知道附加装置的正确的名称,也能够安装并使用附加装置。
153.另一方面,虽未示出,但是所述消息407可包括附加装置的列表。用户可从所述列表中选择用户设置的附加装置。
154.另一方面,机器人示教装置在用户执行已执行次数在预定次数以内的功能时输出消息。此时,消息包括在用户执行特定功能的状态下提示需要执行的作业的消息。机器人示
教装置对用户是否执行通过消息被提示的作业进行监控,当用户执行了该作业时,输出引导下一个作业的关联消息。
155.例如,参照图11,当用户首次执行特定功能时,机器人示教装置提示该功能被首次执行,并输出选择是否将机器人示教装置转换为特定模式(例如,教学模式)的消息408。当用户选择执行特定模式时,机器人示教装置输出提示用户需最优先执行作业的关联消息。
156.如上所述,根据本发明,通过用户与机器人示教装置之间的互动,在机器人示教作业的各步骤中,依次地实现对于机器人的监控并解决问题,因此,新手也能够轻松地进行机器人的示教。
157.另外,根据本发明,机器人示教装置通过与用户的互动向用户提供安装附加装置所需的信息,并且从用户收集设置附加装置所需的信息,因此,用户无需关于用于安装于机器人的附加装置的具体的知识,就能够轻松地将附加装置安装于机器人。
158.作业警告
159.另一方面,本发明提供能够事先预测并预防用户在机器人示教作业中频繁发生的失误的用户界面。
160.图12是示出根据本发明的一实施例利用消息以预防用户常犯的失误的一实施例的概念图。
161.本发明的机器人示教装置向用户输出作业警告用的消息。具体地,机器人示教装置在频繁发生失误的时间点输出消息。
162.其中,作为输出消息的条件,当机器人示教装置在满足特定条件的状态下从用户接收到执行特定功能的请求时,输出消息。其中,特定条件可包括在安装附加装置之后未进行关于附加装置的设置、在执行特定功能时发生已发生次数为预设次数以上的差错中的至少一个。以下,以所述附加装置是作为机器人的末端执行器安装于机器人的臂的工具(tool)为例,对多个有关上述条件的实施例进行具体说明。
163.当在机器人上安装附加装置时,机器人向机器人示教装置传输与此相关的数据。机器人示教装置能够感测到在机器人上安装了附加装置。
164.所述附加装置具有固有的重量,因此,应当基于考虑所述重量来下达控制命令。为此,在将附加装置安装于机器人之后,用户应当将有关附加装置的设置值输入到机器人示教装置以进行有关附加装置的设置。
165.在本示例中,机器人示教系统感测在机器人上连接了工具并对重量的输入进行监控。此时,当未输入重量时,可输出消息,所述消息可形成为接收工具的重量。
166.更具体地,所述机器人示教装置能够在感测到新的工具的状态下未经单独的设置就被下达驱动所述机器人的请求时、或从用户接收到的值与有关所述工具的推算值之差为预设水准以上时,输出所述消息。所述消息可包括单独的按键。机器人示教装置可所述按键被下达用户输入时显示用于输入与所述附加装置相关的设置值的输入窗。
167.例如,参照图12,当在机器人上安装附加装置之后未经单独的设置就被下达机器人关节移动请求时,机器人示教装置输出提示输入有关附加装置的设置值的消息400。当对所述消息400下达触摸输入或从所述消息400被输出的时间点起未经单独的用户输入而经过预设时间时,机器人示教装置输出用于输入与所述附加装置相关的设置值的输入窗409。
168.另外,当通过所述输入窗409完成作为设置值的重量的输入时,所述消息消失,机
器人执行操作。
169.上述的对工具连接问题进行监控的示例可以多种形态扩张并利用。例如,在连接工具之后,所述机器人示教系统能够对所述机器人的操作进行监控,并且感测机器人的异常操作。这种异常操作,例如可以是异常加速度。
170.这样,当感测到异常操作时,能够停止所述机器人的驱动并在所述机器人示教装置的示教界面输出所述消息。所述消息可以是询问用户机器人的操作是否为其意愿并接收用户的响应的界面。
171.当通过所述消息接收到为用户意愿的操作的响应时,所述机器人的驱动可继续。相反地,当通过所述消息接收到并非用户意愿的操作的响应时,可在所述消息上输出用于输入所述工具的重量的输入窗。
172.进一步地,在本示例中,也可自动地输入所述工具的重量。例如,当感测到连接了工具时,所述机器人示教系统接收工具的规格或种类并利用所述工具的规格或种类来计算出所述工具的重量。所述机器人示教装置能够将计算出的重量作为建议值输出在所述消息上,以建议自动地输入重量。
173.另一方面,虽未示出,但是在执行特定功能时,当发生预设次数以上的差错时,每当下达执行所述特定功能的请求时,机器人示教装置输出提示其为频繁发生差错的功能的消息。此时,所述消息可包括提示用户为了解决差错而使用过的方法的文字或图像。
174.如上所述,根据本发明,当达到用户频繁发生失误的作业步骤时,使用户对此了解,并且使用户通过最少的作业就能够预防失误,因此,能够使机器人错误次数最少化并缩短用户的作业时间。
175.机器人错误
176.另一方面,本发明提供能够使用户同时了解并修复在机器人的驱动和控制中发生的错误情况的用户界面。
177.图13至图17是示出根据本发明的一实施例将消息用于修复机器人错误的一实施例的概念图。
178.本发明的机器人示教装置输出消息以修复机器人错误。具体地,机器人示教装置在发生机器人错误的时间点输出消息。
179.其中,输出消息的条件可包括机器人示教装置无法使机器人按照控制命令驱动、机器人的当前姿势与在电脑成像中的形状不同、无法识别用户输入中的至少一个。以下,对多个有关上述条件的实施例进行具体说明。
180.机器人示教装置基于接收到的用户输入的值来形成控制命令并向机器人传输。机器人按照接收到的控制命令驱动。机器人示教装置向机器人传输控制命令并对机器人的驱动状态进行监控。当感测到机器人未按照控制命令驱动时,机器人示教装置输出消息。
181.此时,消息可以多种方式被输出。具体地,消息可包括提示用户能够修复错误的方法或与错误修复关联的图标。
182.进一步地,当所述错误为以往发生过的错误时,机器人示教装置可提示用户曾经在进行所述错误修复时使用过的方法。此时,消息可包括提示用户在进行错误修复时使用过的方法的文字和图像中的至少一个。
183.在一实施例中,参照图13,机器人示教装置在通过输入窗410从用户接收用于机器
人驱动的值之后,生成控制命令并向机器人传输。当感测到机器人未按照所述控制命令驱动时,机器人示教装置输出消息400。与此同时,机器人示教装置将显示部的一部分区域411强调显示,以便用户了解发生了机器人错误。
184.在另一实施例中,参照图14,机器人示教装置能够在发生机器人错误时输出包括修复按键413的消息400。机器人示教装置在所述修复按键413被用户操作时修复机器人错误。由此,本发明在发生机器人错误时无需用户采取额外的措施就能够修复机器人错误。
185.不同与此,本发明在发生机器人错误时,明确地提示错误发生的位置,以使用户选择错误修复方式。具体地,当发生机器人错误时,机器人示教装置将电脑成像的整体区域中与错误发生的位置对应的区域强调显示。当错误发生的位置为多个时,可将电脑成像的多个区域强调显示。之后,当被强调显示的区域被下达用户输入时,机器人示教装置对与被强调显示的区域对应的位置上的错误进行修复。
186.在一实施例中,参照图15,当在机器人的多个位置上发生错误时,机器人示教装置将电脑成像112’的多个区域强调显示414。与此同时,机器人示教装置输出提示发生了错误并提示选择要修复的位置的消息400上。
187.具体地,当发生机器人无法进一步移动的奇异点错误时,机器人示教装置将与无法驱动的关节对应的电脑成像112’的一区域强调显示。之后,当被强调显示的一区域接收到用户输入时,机器人示教装置解除与所述一区域对应的关节以修复奇异点错误。当无法仅通过解除与用户选择区域对应的关节来修复错误时,机器人示教装置输出关联消息415,以引导用户进一步选择关节。此时,机器人示教装置改变与经修复的关节对应的电脑成像112’的一区域的颜色,以提示完成了一部分的修复。
188.另一方面,本发明能够防止当机器人驱动时,机器人的一部分与机器人的其他的部位碰撞或与周边的物体碰撞。具体地,机器人示教装置在从用户接收到机器人驱动和控制所需的信息之后,对机器人的操作进行模拟。当模拟结果为预测到机器人会发生碰撞时,机器人示教装置在机器人示教装置的执行画面上输出有关碰撞的消息。有关碰撞的消息可包括有关碰撞的多种信息。例如,有关碰撞的消息可包括预测会发生碰撞的机器人的关节信息、预测会发生碰撞的三维坐标信息、预测会发生碰撞的方向、预测会发生碰撞的时间信息中的至少一个。
189.此时,所述消息可与上述的示例相同地以ping-pong消息形态被输出。
190.另一方面,当预测到机器人会发生碰撞时,可在计算机成像包括的与机器人的关节对应的图像上显示提示碰撞的图标。当预测到会在多个部位产生冲击时,可在多个位置显示图标。
191.本发明的机器人示教装置能够通过对于输出的消息的用户输入来消除上述碰撞解决。具体地,所述消息可按照发生碰撞的部位来显示修复图标。所述修复图标可以重叠于计算机成像中发生碰撞的部位的方式被显示。当发生碰撞的部位为多个时,可在多个部位显示修复图标。
192.当所述修复图标中的任一个接收到用户输入时,机器人示教装置计算能够避免该部位的碰撞的设置值,并利用该计算出的值对机器人的驱动进行模拟。机器人示教装置重新计算能够避免该部位的碰撞的设置值,直到所述模拟结果为所述部位的碰撞被消除。由此,本发明无需用户输入额外的设置值就能够消除碰撞错误。
193.不同与此,机器人示教装置重新接收与发生碰撞的部位对应的设置值以消除碰撞错误。具体地,消息显示与碰撞错误发生的部位对应的输入区域。机器人示教装置通过所述输入区域从用户接收设置值,并利用接收到的设置值对机器人的驱动进行模拟。机器人示教装置重新接收能够避免该部位的碰撞的设置值,直到所述模拟结果为所述部位的碰撞被消除。
194.另一方面,本发明通过重新设置对于机器人的特定部位的碰撞灵敏度来消除碰撞错误。具体地,消息可显示对于机器人的各个部位的碰撞灵敏度。通过响应对于所述消息的用户输入,机器人示教装置可修改对于特定部位的碰撞灵敏度值。具体地,用户降低对于特定部位的碰撞灵敏度值以消除碰撞错误。此时,碰撞错误可以是因实际的机器人驱动而发生的错误。
195.当对于特定部位的碰撞错误通过降低碰撞灵敏度值而被消除时,机器人示教装置能够在显示提示碰撞错误被消除的消息的同时显示包括碰撞灵敏度变更历史的关联消息。所述关联消息可包括修复为变更前的碰撞灵敏度的图标。如上所述,本发明能够通过ping-pong消息重新设置对于机器人的特定部位的碰撞灵敏度,从而减少不必要的碰撞感测。
196.在一实施例中,参照图16,机器人示教装置利用从用户接收到的信息进行机器人的驱动及模拟,当模拟结果为感测到特定部位发生了碰撞时,输出消息400。此时,消息400输出的信息可包括实际的机器人的驱动的碰撞信息。
197.所述消息400包括关于机器人的模拟影像112。这种模拟影像112可以是实际的机器人的驱动的信息。可在所述模拟影像112中与机器人的各个关节对应的区输出各个关节的碰撞灵敏度值416。另一方面,在预测会发生碰撞或发生了碰撞的区域,可在显示碰撞灵敏度值416的同时重叠地显示单独的图标416’。
198.另外,所述消息400显示与发生碰撞的关节对应的输入区域417,并且可同时显示用于消除碰撞的推荐设置值。当与第一关节对应的输入区域417被下达触摸输入时,机器人示教装置变更与第一关节对应的设置值,并对机器人的操作进行模拟。当模拟结果为未感测到会在第一关节发生碰撞时,与第一关节对应的碰撞图标416’消失418。
199.另一方面,参照图17,当提示第六关节发生了碰撞的图标416’被触摸时,机器人示教装置可显示单独的数字输入窗。机器人示教装置可通过所述数字输入窗从用户接收对于第六关节的碰撞灵敏度值。当利用从用户接收到的碰撞灵敏度对机器人的操作进行模拟的结果为未感测到会发生碰撞时,与第六关节对应的碰撞图标416’消失419。另外,在模拟影像中与第六关节对应的区域显示变更后的碰撞灵敏度值。
200.以上,对利用ping-pong消息来简化用于防止碰撞的控制增益调节的方法进行了说明。由此,能够更加直观地对用户难以设置的要素进行引导。
201.另一方面,本发明的ping-pong消息可用于其他的形态的机器人示教或控制。另外,可通过ping-pong消息来解决有关示教的用户难以了解的监控问题。例如,机器人示教装置能够在机器人的初始姿势设置变更时使用户能够对其进行修复。
202.具体地,机器人的初始姿势作为基准值,是机器人工厂出库时设置的值。机器人在使用过程中,机器人的初始姿势可能会发生差错,从而导致在所述基准值上的机器人姿势与初始姿势不同。
203.本发明的机器人示教装置能够在所述初始姿势设置值在机器人使用过程中改变
时,输出消息。为了输出这种消息,可对机器人的初始姿势的差错进行监控。
204.此时,所述消息可包括能够输入初始姿势设置值的输入区域。用户可向所述输入区域输入初始姿势设置值以重新设置机器人初始姿势。进一步地,所述消息可显示机器人工厂出库时设置的值。用户可参考该初始设置值来重新设置机器人初始姿势。
205.如上所述,根据本发明,在一个消息中提供机器人操作及控制中发生的错误情况及用于修复错误的界面,因此,用户能够在了解到错误时,立即实施修复错误的行为。
206.以上,参照附图对本发明的实施例进行了说明,但是本领域技术人员能够理解本发明能够在其技术思想或必要特征不变的范围内以其他具体的形态实施。因此,应当理解为上述多个实施例在所有方面均为示例而非限定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
