1.本技术方案涉及电子器件组装领域,具体涉及一种微动开关自动定位安装机构。
背景技术:
2.微动开关,是外机械力通过传动元件作用于动作簧片上,使其末端的定触点与动触点快速接通或断开的开关。微动开关是线路板上的电子元器件之一,在线路板的生产装配过程中,需要将微动开关安装在pcb线路板上。
3.现有的将微动开关安装在pcb板上的方式多为使用机械手臂机器人,如申请号为:201911285546.5,公开号为:cn110936152a,名为“一种微动开关的自动生产设备及微动开关的生产方法”的中国发明专利申请所记载的技术方案。
4.上述方案中,多轴机械手臂机器人虽能较为精准地实现微动开关的安装,但是微动开关的安装操作本身简单易行,多轴机械手臂机器人的功能过度冗余,并且多轴机械手臂机器人的采购成本高昂,编程复杂,面临成本较高,性价比较低的缺陷。
技术实现要素:
5.本技术方案的目的是:
6.设计一种微动开关自动定位安装机构,可将微动开关自动装夹并移动后定位安装在pcb板上的特定位置,取代采用机械手臂机器人的操作方式,由于定位安装机构的结构简洁,降低采购成本,简化编程的复杂度,提升微动开关安装操作的性价比。
7.为了实现上述目的,本技术方案提供如下的技术方案:
8.一种微动开关自动定位安装机构,包括基座、pcb定位座、上料安装模块以及供料定位模块;所述pcb定位座、上料安装模块以及供料定位模块均位于基座上端面,并且上料安装模块位于pcb定位座和供料定位模块之间;所述pcb定位座上设置有仿形定位槽;所述上料安装模块包括直线模组、升降气缸、升降座以及夹爪气缸,所述直线模组位于支架上,所述升降气缸通过连接架与直线模组的滑板连接,所述升降座与升降气缸的活塞杆连接,所述升降座上设置有导向插杆,所述夹爪气缸位于升降座底端面;所述供料定位模块包括微动开关定位座。
9.进一步的,所述仿形定位槽具体位于pcb定位座的顶端面,所述仿形定位槽的底部设置有定位柱和第一让位孔,所述定位柱呈圆柱状并且顶部设置有倒角。
10.进一步的,所述支架与基座上端面连接,所述直线模组水平设置;所述连接架呈l形。
11.进一步的,所述升降气缸竖向设置,所述导向插杆与升降座连接,并且导向插杆与升降气缸的活塞杆相平行;所述导向插杆通过直线轴承与连接架活动连接。
12.进一步的,所述夹爪气缸竖向设置在两个导向插杆之间的位置处,并且夹爪气缸的夹爪上设置有夹块,所述夹块呈l形。
13.进一步的,所述微动开关定位座上设置有镶嵌定位槽,所述镶嵌定位槽中设置有
第二让位孔。
14.本技术方案的有益效果为:一种微动开关自动定位安装机构,结合基座、pcb定位座、上料安装模块以及供料定位模块的搭配利用,可将微动开关自动装夹并移动后定位安装在pcb板上的特定位置,确保定位精准,取代采用机械手臂机器人的操作方式,由于本定位安装机构的结构简洁,故可大幅降低采购成本,并且简化编程的复杂度,降低成本,有利于提升微动开关安装操作的性价比。
附图说明
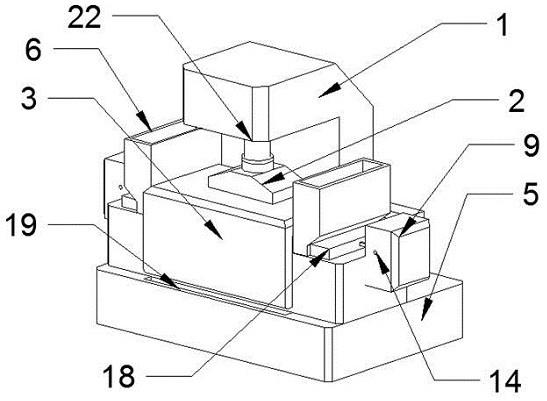
15.图1为本技术方案一种微动开关自动定位安装机构的结构示意图。
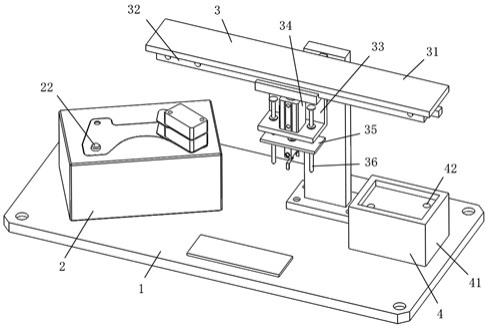
16.图2为本技术方案一种微动开关自动定位安装机构去除pcb板产品及微动开关后的另一视角示意图。
17.图3为本技术方案一种微动开关自动定位安装机构的上料安装模块结构示意图。
18.附图中部件标号:
19.1、基座;2、pcb定位座;21、仿形定位槽;22、定位柱;23、第一让位孔;3、上料安装模块;31、支架;32、直线模组;33、连接架;34、升降气缸;35、升降座;36、导向插杆;37、夹爪气缸;38、夹块;4、供料定位模块;41、微动开关定位座;42、第二让位孔。
具体实施方式
20.为了使本技术方案的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术方案的记载作进一步的详细说明。应当理解,此处所描述的具体实施方式以及相关的优选、举例,仅用以解释本技术方案,并不用于限定本技术方案。
21.参考附图1至图3,一种微动开关自动定位安装机构,包括基座1、pcb定位座2、上料安装模块3以及供料定位模块4;所述pcb定位座2、上料安装模块3以及供料定位模块4均位于基座1上端面,并且上料安装模块3位于pcb定位座2和供料定位模块4之间,pcb定位座2用于对pcb板进行定位放置;所述pcb定位座2上设置有仿形定位槽21,仿形定位槽21与pcb板的轮廓相适配;上料安装模块3用于将供料定位模块4上的微动开关搬移并放置在pcb定位座2的pcb板上;上料安装模块3包括直线模组32、升降气缸34、升降座35以及夹爪气缸37,直线模组32位于支架31上,升降气缸34通过连接架33与直线模组32的滑板连接,直线模组32用于驱动连接架33水平往复移动,升降座35与升降气缸34的活塞杆连接,升降气缸34用于驱动升降座35上下升降移动,升降座35上设置有导向插杆36,导向插杆36用于起导向、对位作用,所述夹爪气缸37位于升降座35底端面,夹爪气缸37用于夹紧和松开微动开关产品;所述供料定位模块4包括微动开关定位座41,微动开关定位座41用于放置、固定微动开关产品。
22.仿形定位槽21具体位于pcb定位座2的顶端面,所述仿形定位槽21的底部设置有定位柱22和第一让位孔23,定位柱22呈圆柱状并且顶部设置有倒角,定位柱22用于贯穿pcb板实现定位,第一让位孔23用于起让位作用,避免与导向插杆36相干涉。
23.支架31与基座1上端面连接,所述直线模组32水平设置;所述连接架33呈l形,连接架33用于固定升降气缸34。
24.升降气缸34竖向设置,升降气缸34具体为单活塞杆直线气缸,导向插杆36与升降
座35连接,并且导向插杆36与升降气缸34的活塞杆相平行,导向插杆36的数量为两根并且均竖向布置;导向插杆36通过直线轴承与连接架33活动连接,导向插杆36同时可对升降座35的上下升降移动进行导向,导向插杆36可贯穿微动开关产品上的两个通孔。
25.夹爪气缸37竖向设置在两个导向插杆36之间的位置处,并且夹爪气缸37的夹爪上设置有夹块38,所述夹块38呈l形,夹块38用于配合夹爪夹紧或者松开微动开关产品。
26.微动开关定位座41上设置有镶嵌定位槽,镶嵌定位槽用于对微动开关产品进行放置、定位,镶嵌定位槽中设置有第二让位孔42,第二让位孔42相对于导向插杆36起让位和定位作用。
27.本技术方案的运转原理是:
28.pcb搬运机构将pcb板放置在pcb定位座2的仿形定位槽21内,微动开关供料机构将待安装的微动开关放置在供料定位模块4的微动开关定位座41内;
29.随后上料安装模块3的直线模组32驱动连接架33水平移动,使夹爪气缸37位于微动开关的正上方;然后升降气缸34的活塞杆向下伸出,驱动升降座35向下移动,夹爪气缸37与导向插杆36一并下降,导向插杆36贯穿微动开关产品上的通孔后,插入微动开关定位座41上的第二让位孔42内,实现导向和定位;此时微动开关位于两个夹块38之间,夹爪气缸37的夹爪动作,使夹块38夹紧微动开关产品;升降气缸34与直线模组32配合移动,将微动开关搬运至pcb板上方;
30.升降气缸34的活塞杆向下伸出,驱动升降座35向下移动,夹爪气缸37与导向插杆36一并下降,导向插杆36贯穿pcb板上的通孔后,插入第一让位孔23,微动开关放置在pcb板上端面特定位置,随后夹爪气缸37的夹爪动作,夹块38松开微动开关产品,实现微动开关的精准定位、安装。
31.上述实施例用于对本技术方案作进一步的说明,但并不将本技术方案局限于这些具体实施方式。凡在本技术方案所记载的精神和原则之内所作的任何修改、等同替换、改进以及引申等,均应理解为在本技术方案的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。