一种室内多层智慧农场控制系统及方法
(一)技术领域:
1.本发明涉及智慧农业及其自动化相关技术领域,尤其是一种室内多层智慧农场控制系统及方法。
(二)
背景技术:
2.我国在农业领域一直处于发展速度较缓慢的状态,归根结底是我们已有耕地的产量还不够高。随着科技的发展,全国已经将农业技术发展的侧重点放在了智慧农业领域上,并且通过智慧农业系统种植的作物给我国的经济带来了很大的提高,推动了我国农业经济的发展。
3.而现如今,我国的“智慧农业”到了发展瓶颈。现有的室内智慧农场多以传统农业大棚为原型,此类农场划分种类多,工作环境不一样,专业性强,管理难度大;现有的环境及植株监测系统精度有限,不能准确反映植株个体的生长状况;现有农场的实际温度及设备运行状态数据得不到采集,在植株生长过程中无法体现过程温度、湿度、光照等参数,植株生长环境得不到保障。
(三)
技术实现要素:
4.本发明的目的在于提供一种室内多层智慧农场控制系统及方法,该系统综合了传感技术、机器视觉识别技术及控制技术于一体,是一种结构简单且容易实现的多层智慧农场控制系统及方法。
5.本发明的技术方案:一种室内多层智慧农场控制系统,其特征在于它包括外部框架、水肥药一体机、二维插补防水系统、视觉识别系统、水帘风机系统、植株培育模块和控制单元;其中,所述水肥药一体机用于进行肥料、药品的配置;所述二维插补防水系统用于带动视觉识别系统进行移动;所述视觉识别系统用于识别植株缺素症及病虫害等多种性状,以及进行定点施肥、喷药;所述水帘风机系统用于调节植株培育模块的温湿度;所述植株培育模块用于提供植株生长环境,补充光照度以及水分;所述控制单元用于控制该系统正常运作并对系统进行实时监测;所述水肥药一体机、二维插补防水系统、视觉识别系统、水帘风机系统和植株培育模块均安装在外部框架上。
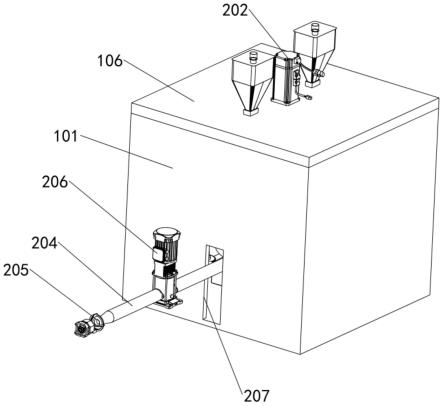
6.所述水肥药一体机安装在外部框架外侧,由氮肥料筒、磷肥料筒、钾肥料筒、药筒、液体输送泵、漏斗箱、反应釜、搅拌电机和内部搅拌器组成;如图1-a、图1-b所示,所述氮肥料筒、磷肥料筒、钾肥料筒、药筒排成一列固定于安装于漏斗箱上方;所述漏斗箱下方与反应釜相连;所述搅拌电机于反应釜右侧,并与反应釜的内部搅拌器连接。
7.所述二维插补防水系统是由x轴滑轨、x轴步进电机、x轴滑块、y轴滑轨、y轴步进电机、y轴滑块、x轴皮带和y轴皮带组成,如图3和图4所示;所述x轴滑轨和y轴滑轨安装在外框架上;所述x轴滑轨两端通过y轴滑块与y轴滑轨相连,利用y轴步进电机实现两滑轨间的相互移动;所述x轴滑块与x轴皮带固定连接;所述x轴皮带与x轴步进电机依靠摩擦力固定连接,并依靠摩擦力实现x轴滑块在x轴滑轨上运动,即实现视觉识别系统在x轴滑轨上运动;
所述y轴滑块与y轴皮带固定连接;所述y轴皮带与y轴步进电机依靠摩擦力固定连接,并依靠摩擦力实现y轴滑块在y轴滑轨上运动,即实现x轴滑轨在y轴滑轨上运动,如图2和图3所示。
8.所述视觉识别系统包括喷药喷头、施肥滴管及图像采集摄像头组成;所述视觉识别系统经由二维插补防水系统的y轴滑轨固定于外部框架上;所述视觉识别系统悬挂于植株培育模块上方,通过二维插补防水系统的x轴滑块与x轴滑轨固定,并利用二维插补防水系统的x轴步进电机实现视觉识别系统与x轴滑轨的相互移动;所述施肥滴管与x轴滑块呈固定连接,并延伸至土壤高度位置;所述喷药喷头与施肥滴管并列且固定于x轴滑块上,并延伸至植株叶片高度位置;所述图像采集摄像头与喷药喷头、施肥滴管在同一平面且固定于x轴滑块上,并延伸至可拍摄到大量植株的位置,如图6所示。
9.所述水帘风机系统由风机、水帘和电机组成;所述水帘风机系统安装在不与水肥药一体机相邻的外部框架的外侧;所述水帘固定于风机和植株培育模块中间,并且从外部框架的顶端延伸至底端,如图1所示。
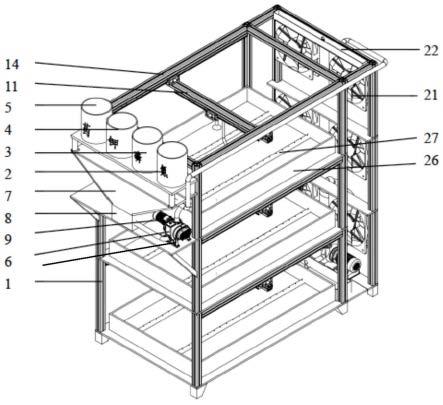
10.所述植株培育模块是分层结构,且每层均由植株培育箱、滴灌管和补光灯组成;所述植株培育模块的分层结构的每一层均配有两组相邻的风机;所述每一层的植株培育箱均固定安装于外部框架上;所述滴灌管固定于所述植株培育箱的底部,即埋藏在土里;所述滴灌管上有滴灌孔,且滴灌孔与种植植株的根部位置所对应;所述补光灯固定安装于植株培育模块的顶部,即最上层的补光灯固定于外部框架的顶端,中间层的补光灯固定于上一层植株培育箱的底端,最底层的补光灯固定于中间层植株培育箱的底端,以此类推,如图1、图4所示。
11.所述水帘风机系统还包括温湿度传感器;所述温湿度传感器安装于植株培育模块的每一层植株培育箱的中部位置,用于对植株生长环境进行温湿度检测,如图4所示。
12.所述植株培育模块中还包括光照传感器和土壤湿度传感器;所述光照传感器安装于植株培育模块的每一层植株培育箱的中部位置,用于对植株生长环境进行光照强度检测;所述土壤湿度传感器安装于植株培育模块的每一层植株培育箱的底部位置,用于对植株生长的土壤环境的湿度进行检测,如图4所示。
13.所述控制单元选用三菱q系列plc作为控制器。
14.一种室内多层智慧农场的控制方法,其特征在于它包括以下步骤:
15.(1)由视觉识别系统上的图像采集摄像头对植株培育箱的植株进行图像识别检测,当检测到患病植株时,则会将此植株的坐标信号发送给控制单元,由控制单元生成控制信号发送给水肥药一体机,由水肥药一体机调配所需肥料和农药,控制二维插补防水系统上的电机驱动模块,分别驱动x轴步进电机和y轴步进电机,通过x轴滑轨和y轴滑轨带动视觉识别系统移动,从而使视觉识别系统运动至患病植株坐标处,完成精确施肥;
16.(2)当温湿度传感器检测到温湿度异常时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给水帘风机系统,通过水泵将水抽至水帘风机系统顶部并生成水帘,风机转动,将水帘中的水雾吹到植株培育箱以实现其温湿度的改变;
17.(3)当光照传感器检测到光照不足时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给补光灯,开启补光灯以实现补充光照;
18.(4)当土壤湿度传感器检测到土壤过干时,则会将此异常信号发送给控制单元,控
制单元生成控制信号,通过水泵将水从储水罐抽至滴灌管,并通过滴灌孔实现对植株的精准浇水以实现改变土壤湿度;
19.(5)当需要施肥或喷药时,药品从氮肥料筒、磷肥料筒、钾肥料筒或药筒中释放经漏斗箱进入到反应釜中,经搅拌电机带动内部搅拌器搅拌均匀充分溶解后,即可实现喷药或施肥;
20.(6)二维插补防水系统及视觉识别系统:二维插补防水系统会带动视觉识别系统进行样本采集,经特征提取确定植株的患病及缺素症性状及位置,并通过喷药喷头和施肥滴管进行定点定量喷药和施肥。
21.本发明的工作原理:
22.当系统进行工作时,二维插补防水系统带动视觉识别系统按既定路线进行扫描,当系统检测出摄像头拍摄的照片中为患病和缺素症植株,便会将信息传输至云端和控制系统,使水肥药一体机进行下药,放水,搅拌,等动作。当扫描过程全部结束后,二维插补防水系统回到原点并去往最先检测出患病或缺素症的植株位置进行相应的喷药或施肥,起到定点高效的作用。同时,农场会根据内部环境的各种因素是否达标来进行水帘风机等系统的动作。
23.本发明的优越性:该系统综合了传感技术、机器视觉识别技术及控制技术于一体,图像采集摄像头可通过二维插补防水系统对每颗植株进行近距离的精确识别和检测,实现智能判别植株缺素症及病虫害等多种性状的功能;视觉识别系统能根据判别结果移动到其具体位置进行点对点的施肥、喷药,做到准确地对症下药,节省药品与肥料,从而降低成本,保证农场经济效益;通过传感器对环境的实时监测,绘制植株生长环境因素的实时变化曲线,以此反映任意时刻的环境状态,实现智能化管理,促进“智慧农业”的新发展。
(四)附图说明:
24.图1为本发明所涉一种室内多层智慧农场控制系统的整体结构示意图(其中,图1-a为整体结构图,图1-b为后视图)。
25.图2为本发明所涉一种室内多层智慧农场控制系统中视觉识别系统的结构示意图。
26.图3为本发明所涉一种室内多层智慧农场控制系统中二维插补防水系统结构的俯视图。
27.图4为本发明所涉一种室内多层智慧农场控制系统中植株培育模块的结构示意图。
28.图5为本发明所涉一种室内多层智慧农场控制系统中反应釜的内部搅拌器的结构示意图。
29.图6为本发明所涉一种室内多层智慧农场控制系统中视觉识别系统与植株培育箱的位置关系示意图。
30.图中:1为外部框架;2为氮肥料筒;3为磷肥料筒;4为钾肥料筒;5为药筒;6为液体输送泵;7为漏斗箱;8为反应釜;9为搅拌电机;10为内部搅拌器;11为x轴滑轨;12为x轴步进电机;13为x轴滑块;14为y轴滑轨;15为y轴步进电机;16为y轴滑块;17为喷药喷头;18为施肥滴管;19为图像采集摄像头;20为补光灯;21为风机;22为水帘;23为电机;24为储水罐;25
为水泵;26为植株培育箱;27为滴灌管;28为滴灌孔;29为土壤湿度传感器;30为温湿度传感器;31为光照传感器;32为x轴皮带;33为y轴皮带。
(五)具体实施方式:
31.下面结合附图,对本发明的具体实施方式作进一步详细说明。
32.在本技术中,术语“上”、“下”、“左”、“右”、“前”、“后”、“顶部”、“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系。这些术语主要是为了更好地描述本技术及其实施例,并非用于限定所指示的装置、元件或组成部分必须具有特定方位,或以特定方位进行构造和操作。对于本领域普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
33.如图1至图5所示,一种室内多层智慧农场控制系统,其特征在于其主要包括外部框架1,水肥药一体机,二维插补防水系统,视觉识别系统,水帘风机系统和植株培育模块这六大模块组成;其中,水肥药一体机包括安装在外部框架上的由氮2、磷3、钾4肥料筒,药筒5,漏斗箱7,反应釜8,搅拌电机9,液体输送泵6,内部搅拌器10组成;所述二维插补防水系统包括安装在外框架上x轴d11,y轴滑轨14,x轴滑块13,y轴滑块16,x轴步进电机12,y轴步进电机15组成;所述视觉识别系统包括喷药喷头17,施肥滴管18,以及图像采集摄像头19组成;所述水帘风机系统由风机21,水帘22和电机23组成;所述植株培育模块由植株培育箱26,滴灌管27和补光灯20组成。
34.所述水肥药一体机安装在外部框架1外侧,如图1-a、图1-b所示。
35.如图1-a、图1-b所示,所述水肥药一体机由氮2、磷3、钾4肥料筒和药筒5并排成一列固定于漏斗箱7上方,漏斗箱7下方与反应釜8相连,搅拌电机9于反应釜8右侧,并与反应釜8的内部搅拌器10连接。
36.所述视觉识别系统经由y轴滑轨14固定于外部框架1上,x轴滑轨11通过y轴滑块16固定于y轴滑轨14上,通过y轴步进电机15实现两滑轨的相互移动,视觉识别系统悬挂于植株培育模块上方,通过x轴滑块13与x轴滑轨11固定,通过x轴步进电机12实现视觉识别系统与x轴滑轨11的相互移动,如图1-a、图1-b、图2及图3所示。
37.所述喷药喷头17,施肥滴管18,以及图像采集摄像头19与x轴滑块13直接固定,x轴滑块13与x轴皮带32固定,x轴皮带32与x轴步进电机12依靠摩擦力固定,并依靠摩擦力实现x轴滑块13在x轴滑轨11上运动,即实现视觉识别系统在x轴滑轨11上运动,如图2和图3所示。
38.所述二维插补防水系统的x轴滑轨11两端通过y轴滑块16与y轴滑轨14相连,y轴滑块16与y轴皮带33固定,y轴皮带33与y轴步进电机15依靠摩擦力固定,并依靠摩擦力实现y轴滑块16在y轴滑轨14上运动,即实现x轴滑轨11在y轴滑轨14上运动。综上所述,所述视觉识别系统实现在水平面上的自由移动,如图2和图3所示。
39.所述视觉识别系统的施肥滴管18与x轴滑块13直接固定,并延伸至植株培育箱26底部位置,即土壤高度位置;喷药喷头17与施肥滴管18并列且固定于x轴滑块13上,并延伸至植株培育箱26中部位置,即植株叶片高度位置;图像采集摄像头19与喷药喷头17、施肥滴管18在同一平面且固定于x轴滑块13上,并延伸至植株培育箱26顶部位置,即可拍摄到大量植株的位置,如图6所示。
40.所述水帘风机系统安装在不与水肥药一体机相邻的外部框架1的外侧,且每层均安装两组相邻的风机21,所述水帘22固定于所述风机21和所述植株培育箱26中间,并且从外部框架1的顶端延伸至底端,如图1所示。
41.所述植株培育模块共分为三层,每一层的植株培育箱26均与外部框架1直接固定,所述滴灌管27固定于所述植株培育箱26的底部,即埋藏在土里,且所述滴灌管27上的滴灌孔28与种植植株的根部位置所对应。所述补光灯20固定于所述植株培育模块的顶部,即最上层的补光灯固定于外部框架1的顶端,中间层的补光灯固定于最上层植株培育箱的底端,最底层的补光灯固定于中间层植株培育箱的底端,如图1、图4所示。
42.所述视觉识别系统上的图像采集摄像头19对植株培育箱26的植株进行图像识别检测,当检测到植株患病时,则会将此植株的坐标信号发送给控制单元,控制单元生成控制信号发送给水肥药一体机,当其调配好所需肥料和农药后控制二维插补防水系统上的电机驱动模块,分别驱动x轴步进电机12和y轴步进电机15,通过滑轨带动视觉识别系统移动,从而使视觉识别系统运动至患病植株坐标处,完成精确施肥,如图6所示。
43.所述水帘风机系统中的温湿度传感器30于植株培育箱26中部位置,并对其环境进行温湿度检测,当检测到温湿度异常时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给水帘风机系统,通过水泵25将水抽至水帘风机系统顶部并生成水帘,风机21转动,将水帘中的水雾吹到植株培育箱26以实现改变其温湿度,如图1、图4所示。
44.所述植株培育模块中的光照传感器31于植株培育箱26中部位置,并对其环境进行光照强度检测,当检测到光照不足时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给补光灯20,开启补光灯20以实现补充光照,如图1、图4所示。
45.所述植株培育模块中的土壤湿度传感器29于植株培育箱26底部位置,并对土壤环境的湿度进行检测,当检测到土壤过干时,则会将此异常信号发送给控制单元,控制单元生成控制信号,通过水泵25将水从储水罐24抽至滴灌管27,并通过滴灌孔28实现对植株的精准浇水以实现改变土壤湿度,如图1、图4所示。
46.一种室内多层智慧农场的控制方法,其特征在于它包括以下步骤:
47.(1)由视觉识别系统上的图像采集摄像头对植株培育箱的植株进行图像识别检测,当检测到患病植株时,则会将此植株的坐标信号发送给控制单元,由控制单元生成控制信号发送给水肥药一体机,由水肥药一体机调配所需肥料和农药,控制二维插补防水系统上的电机驱动模块,分别驱动x轴步进电机和y轴步进电机,通过x轴滑轨和y轴滑轨带动视觉识别系统移动,从而使视觉识别系统运动至患病植株坐标处,完成精确施肥;
48.(2)当温湿度传感器检测到温湿度异常时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给水帘风机系统,通过水泵将水抽至水帘风机系统顶部并生成水帘,风机转动,将水帘中的水雾吹到植株培育箱以实现其温湿度的改变;
49.(3)当光照传感器检测到光照不足时,则会将此异常信号发送给控制单元,控制单元生成控制信号发送给补光灯,开启补光灯以实现补充光照;
50.(4)当土壤湿度传感器检测到土壤过干时,则会将此异常信号发送给控制单元,控制单元生成控制信号,通过水泵将水从储水罐抽至滴灌管,并通过滴灌孔实现对植株的精准浇水以实现改变土壤湿度;
51.(5)当需要施肥或喷药时,药品从氮肥料筒、磷肥料筒、钾肥料筒或药筒中释放经
漏斗箱进入到反应釜中,经搅拌电机带动内部搅拌器搅拌均匀充分溶解后,即可实现喷药或施肥;
52.(6)二维插补防水系统及视觉识别系统:二维插补防水系统会带动视觉识别系统进行样本采集,经特征提取确定植株的患病及缺素症性状及位置,并通过喷药喷头和施肥滴管进行定点定量喷药和施肥。
53.以上所述仅为本技术的优选设计而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。