一种基于改进式分布式模型预测的大通信周期auv编队方法
技术领域
1.本发明属于自动控制技术领域,涉及一种多水下航行器编队控制的编队控制方法。具体为在实际控制中针对大通信周期的auv编队系统进行状态预测,进而使估计出的状态值更接近真实值,达到编队避障及队形保持等控制指标。
背景技术:
2.自主式无人水下航行器(autonomous underwater vehicle,auv)作为一种替代人类进行探索与开发深海的水下作业工具,以诸多突出优点成为了各国科研人员的研究热点。由于不需要系缆进行信号传输,auv的活动范围极大扩大,不需要庞大的水面支持,且入水后无需人为干预,auv可以完成海底探测、自主侦察、反水雷作战、水下干扰等诸多任务。随着应用范围不断扩大,单个auv执行较大规模任务时效率较低甚至无法完成,因此多水下航行器协同作业成为了一种新的应用形式,得到了更普遍的关注。
3.从控制方法而言,现有的编队方法可分为领航跟随者法、人工势场法、虚拟结构法、基于行为法、基于图论法和强化学习法。其中采用领航跟随者法、虚拟结构法和基于行为法的编队控制占大多数。群集编队的主要目标是利用个体之间局部相对位置或速度等信息,设计反馈控制模式,形成稳定的队形,而由于水下通信条件较为特殊,因此通信约束下的编队控制成为了众多学者比较关心的问题。
技术实现要素:
4.要解决的技术问题
5.针对多auv编队问题中由于硬件问题或者通信网络堵塞导致的通信频率低,通信间隔时间长的问题,本发明提供了一种基于改进式分布式模型预测的大通信周期auv编队方法。
6.技术方案
7.一种基于改进式分布式模型预测的大通信周期auv编队方法,其特征在于步骤如下:
8.步骤1:在tc时刻,使用上一时刻t
c-1
计算出的最优控制输入作为下一控制周期的初始控制输入,使用当前观测到的状态向量作为下一个控制周期的初始状态;
9.步骤2:通过通信或者上一控制时刻的信息进行邻域auv的确定;
10.步骤3:若当前时刻为通信时刻,则将当前时刻tc的状态向量观测值与下一控制周期的估计控制序列打包,与邻近各auv进行信息交换;若当前不是通信时刻,则直接进行步骤4;
11.步骤4:通过通信交互或者由上一控制周期估计得到相邻auv状态信息之后,在每一个控制步长对邻域auv进行状态估计,对邻近auv的状态向量进行预测,然后将对邻近auv预测得到的状态信息代入自身代价函数中,求解相应步长的最优控制序列;
12.步骤5:根据步骤4求解出的最优控制序列,取第一个步长的控制量作为输出传送
到执行器进行控制,然后令c=c 1,更新控制步长。
13.本发明进一步的技术方案:步骤3具体如下:
14.在当前时刻通过传感器以及观测器对系统状态进行采样,同时通过式(3.1)求得估计控制向量
[0015][0016]
其中,t
p
为控制周期,表示在t
c-1
时刻计算出的最优控制序列;表示时刻s=t
c-1
t
p
的最优控制输入,作为接下来一个控制序列的控制输入;
[0017]
将上面所述控制向量和观测到的状态序列与邻近auv进行信息交互。
[0018]
本发明进一步的技术方案:步骤4中对邻近auv的状态向量进行预测具体如下:
[0019]
在使用相邻auv传输的估计控制序列时,加入状态量中的速度信息,具体表达如式(3-2)
[0020][0021]
其中,t
p
为控制周期,t
kh
为大周期通信模式时的采样时刻,h为采样周期,k=1,2,
…
,n表示当前更新为第k个采样周期,为上一控制周期的估计速度,可以用来计算接下来n个步长所缺失的估计控制向量;
[0022]
有了上述相邻auv的信息,mpc子控制器将相关信息代入优化函数式(3.3)
[0023][0024]
其中,z-i
(s;tc)为控制器收到的相邻auv状态值,除了以上的优化函数,控制器计算过程中还需要保证系统满足以下条件及约束
[0025]
zi(s;tc),z-i
(s;tc)∈z
ꢀꢀꢀ
(3.4.1)
[0026]
ui(s;tc)∈u
ꢀꢀꢀ
(3.4.2)
[0027]
zi(tc;tc)=zi(tc)
ꢀꢀꢀ
(3.4.3)
[0028]
zi(tc t
p
;tc)∈φiꢀꢀꢀ
(3.4.4)
[0029][0030][0031]
其中,s∈[tc,tc t
p
],zi(s;tc)∈z和zi(tc t
p
;tc)∈φi分别表示状态约束和终端约束条件;在优化问题中代价函数定义如下式
[0032][0033]
其中fi和φi分别为
[0034][0035]
φi(zi(t))=γ∑||m(t)||2ꢀꢀꢀ
(3.5.2)
[0036]
上式中||
·
||为n维空间中任一矢量的范数表示,a表示多auv系统中的成对的auv的组合,假设auv系统通信网络为一个无向图,即若(i,j)∈a,那么对于auvi∈a,则有(j,i)∈a且α、β和γ为加权系数,g(t)和m(t)可根据编队过程中的需求进行选择;
[0037]
代价函数具体表示如式(3.6)、式(3.7)
[0038][0039][0040][0041][0042]
式中,α、β、γ均为加权系数,其中表示对第i个auv控制序列的约束,μ、ρ分别为对参考距离di和相邻auv视线角度σi的权重系数的权重系数表示当前auv与子系统其他auv间的预测横坐标差值,表示当前auv与子系统其他auv间的预测纵坐标差值,di为当前auv与相邻auv之间期望距离,且d1cosθ1,d2cosθ1分别表示当前auv和auv2,auv3之间的期望横坐标差值,d1sinθ1,d2sinθ1则表示当前auv和auv2,auv3之间的期望纵坐标差值;
[0043]
经过以上优化函数,控制器将计算出固定n个控制周期内的最优控制序列
[0044]
一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
[0045]
一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
[0046]
有益效果
[0047]
本发明提供的一种基于改进式分布式模型预测的大通信周期auv编队方法,此方法既可以克服传统领航-跟随者法计算量大、通信信道堵塞的问题,还可以很好的解决使用大通信周期水声通信设备时对系统造成的控制延迟或失效的影响。利用本发明提出的方法对邻近auv的状态向量进行更新,系统可以有效克服通信间隔时间久引起的模型预测控制算法的失效。此外,利用本发明提出的方法除了可用在水下auv编队中,还可以用在陆上或水面存在大面积障碍物导致的通信周期过长的编队问题中。
[0048]
本发明所提出的auv编队成员状态估计方法与现有的编队技术相比,具有如下几个优点:
[0049]
1.鲁棒性高,可扩展性强,计算量小
[0050]
以往对auv编队控制采取的方法大多采用集中式控制,集中式控制算法虽然简单,但是主节点计算量大,通信量比较大,而且主节点故障后会导致编队整体失败;本发明将采用分布式模型预测控制算法,采用多个模型预测控制器,可以避免以上集中式控制方法的弊端,且具有更高的鲁棒性以及更好的可扩展性。
[0051]
2.预测数据准确
[0052]
auv编队控制中所使用的声学通信设备通信频率较低,导致控制器的输入序列“过时”,控制效果在实时队形方面难以保证;采用本发明提出的预测方法,可以在通信周期较大的情况下对相邻auv状态信息进行准确预测,从而满足编队控制的实时性要求。
[0053]
3.应用领域广
[0054]
本发明方法不仅适用于任何深度下基于水声通信的auv编队问题,还可以应用在通信频率不可太高的陆地或空中作战条件下的智能体编队问题中。
附图说明
[0055]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0056]
图1分布式模型预测控制结构;
[0057]
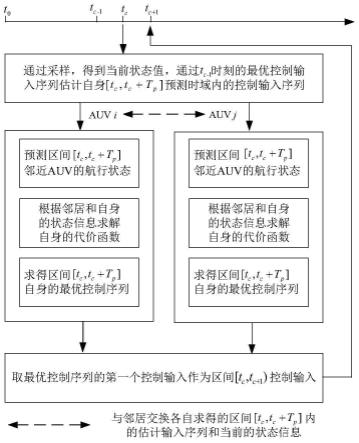
图2第i个、第j个auv控制向量估计过程;
[0058]
图3 5s通信周期时编队避障仿真轨迹;
[0059]
图4单领航者模式编队前向距离误差;
[0060]
图5编队过程推力、扭矩、速度及角速度曲线;
[0061]
图6编队过程航向角变化;
[0062]
图7 5s通信周期折线编队仿真轨迹;
[0063]
图8 5s通信周期折线编队前向距离误差;
[0064]
图9 5s通信周期折线编队推力、转矩、速度及角速度曲线;
[0065]
图10 5s通信周期折现编队航向角曲线。
具体实施方式
[0066]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0067]
本发明提供的基于改进式分布式模型预测的大通信周期auv编队方法,该方法的特点为通过改变对邻近auv状态值的估计方法,使各mpc控制器所采用的估计输入值最接近采样时刻的真实状态值。理想情况的分布式mpc控制器中,有假设状态信息的更新时刻与信息交互时刻相等,但是由于通信周期较长,导致控制器所用的状态序列有可能是几秒之前或者十几秒之前的“过时”数据,求得的控制序列自然不是最优。本发明对相邻auv状态的估计函数进行修改,同时将mpc控制器中的代价函数进行修改,可以在自身控制器中得到最优控制序列,最终实现auv编队。
[0068]
本发明包括以下步骤:
[0069]
步骤1:第i个auv的初始化
[0070]
在具体编队任务下达之后,假设当前更新时刻为tc时刻,通过上一控制时刻t
c-1
使用的最优控制向量作为控制器中当前时刻的初始控制输入,使用当前时刻系统观测出的状态值作为接下来这一控制周期的初始状态。
[0071]
步骤2:确定邻域auv
[0072]
在控制器进行优化问题求解之前,需要先确定当前时刻相邻auv的信息,包括相邻auv个数,相邻auv状态量等信息。若当前时刻为通信时刻,则可以直接通过通信范围确定邻域内auv信息,若不是通信时刻,则延续上一控制周期中相邻auv的数量等信息。
[0073]
步骤3:与邻近auv信息交互
[0074]
在当前时刻通过传感器以及观测器对系统状态进行采样,同时通过式(3.1)求得估计控制向量
[0075][0076]
其中,t
p
为控制周期,表示在t
c-1
时刻计算出的最优控制序列;表示时刻s=t
c-1
t
p
的最优控制输入,作为接下来一个控制序列的控制输入。
[0077]
将上面所述控制向量和观测到的状态序列与邻近auv进行信息交互。
[0078]
步骤4:对邻近auv进行预测
[0079]
在通信频率足够时,可以在n个步长对相邻auv的状态量进行预测,但是由于通信周期过长,通过通信得到的信息难以满足每一个控制周期的数据需求。本发明方法提出在使用相邻auv传输的估计控制序列时,加入状态量中的速度信息,具体表达如式(3-2)
[0080][0081]
其中,t
p
为控制周期,t
kh
为大周期通信模式时的采样时刻,h为采样周期,k=1,2,
…
,n表示当前更新为第k个采样周期,为上一控制周期的估计速度,可以用来计算接下来n个步长所缺失的估计控制向量。
[0082]
有了上述相邻auv的信息,mpc子控制器将相关信息代入优化函数式(3.3)
[0083][0084]
其中,z-i
(s;tc)为控制器收到的相邻auv状态值,除了以上的优化函数,控制器计算过程中还需要保证系统满足以下条件及约束
[0085]
zi(s;tc),z-i
(s;tc)∈z
ꢀꢀꢀ
(3.4.1)
[0086]
ui(s;tc)∈u
ꢀꢀꢀ
(3.4.2)
[0087]
zi(tc;tc)=zi(tc)
ꢀꢀꢀ
(3.4.3)
[0088]
zi(tc t
p
;tc)∈φiꢀꢀꢀ
(3.4.4)
[0089][0090]
[0091]
其中,s∈[tc,tc t
p
],zi(s;tc)∈z和zi(tc t
p
;tc)∈φi分别表示状态约束和终端约束条件。在优化问题中代价函数定义如下式
[0092][0093]
其中fi和φi分别为
[0094][0095]
φi(zi(t))=γ∑||m(t)||2ꢀꢀꢀ
(3.5.2)
[0096]
上式中||
·
||为n维空间中任一矢量的范数表示,a表示多auv系统中的成对的auv的组合,假设auv系统通信网络为一个无向图,即若(i,j)∈a,那么对于auvi∈a,则有(j,i)∈a且α、β和γ为加权系数,g(t)和m(t)可根据编队过程中的需求进行选择。
[0097]
在本发明中代价函数具体表示如式(3.6)、式(3.7)
[0098][0099][0100][0101][0102]
式中,α、β、γ均为加权系数,其中表示对第i个auv控制序列的约束,μ、ρ分别为对参考距离di和相邻auv视线角度σi的权重系数的权重系数表示当前auv与子系统其他auv间的预测横坐标差值,表示当前auv与子系统其他auv间的预测纵坐标差值,di为当前auv与相邻auv之间期望距离,且d1cosθ1,d2cosθ1分别表示当前auv和auv2,auv3之间的期望横坐标差值,d1sinθ1,d2sinθ1则表示当前auv和auv2,auv3之间的期望纵坐标差值;经过以上优化函数,控制器将计算出固定n个控制周期内的最优控制序列
[0103]
步骤5:执行器控制
[0104]
在前序计算得到最优控制序列之后,其中包含n个步长的控制向量,在每一控制周期仅选取第一个步长的最优控制向量,控制器给执行器输出之后,一个控制周期过后转到步骤1进行下一次最优控制的更新。
[0105]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。