技术特征:
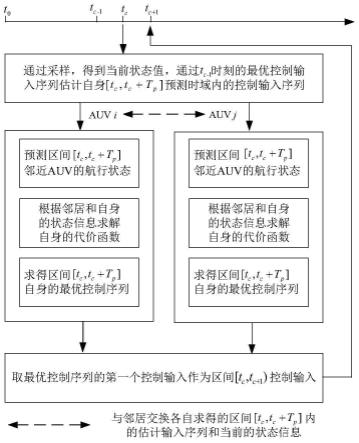
1.一种基于改进式分布式模型预测的大通信周期auv编队方法,其特征在于步骤如下:步骤1:在t
c
时刻,使用上一时刻t
c-1
计算出的最优控制输入作为下一控制周期的初始控制输入,使用当前观测到的状态向量作为下一个控制周期的初始状态;步骤2:通过通信或者上一控制时刻的信息进行邻域auv的确定;步骤3:若当前时刻为通信时刻,则将当前时刻t
c
的状态向量观测值与下一控制周期的估计控制序列打包,与邻近各auv进行信息交换;若当前不是通信时刻,则直接进行步骤4;步骤4:通过通信交互或者由上一控制周期估计得到相邻auv状态信息之后,在每一个控制步长对邻域auv进行状态估计,对邻近auv的状态向量进行预测,然后将对邻近auv预测得到的状态信息代入自身代价函数中,求解相应步长的最优控制序列;步骤5:根据步骤4求解出的最优控制序列,取第一个步长的控制量作为输出传送到执行器进行控制,然后令c=c 1,更新控制步长。2.根据权利要求1所述的一种基于改进式分布式模型预测的大通信周期auv编队方法,其特征在于:步骤3具体如下:在当前时刻通过传感器以及观测器对系统状态进行采样,同时通过式(3.1)求得估计控制向量控制向量其中,t
p
为控制周期,表示在t
c-1
时刻计算出的最优控制序列;表示时刻s=t
c-1
t
p
的最优控制输入,作为接下来一个控制序列的控制输入;将上面所述控制向量和观测到的状态序列与邻近auv进行信息交互。3.根据权利要求1所述的一种基于改进式分布式模型预测的大通信周期auv编队方法,其特征在于:步骤4中对邻近auv的状态向量进行预测具体如下:在使用相邻auv传输的估计控制序列时,加入状态量中的速度信息,具体表达如式(3-2)其中,t
p
为控制周期,t
kh
为大周期通信模式时的采样时刻,h为采样周期,k=1,2,
…
,n表示当前更新为第k个采样周期,为上一控制周期的估计速度,可以用来计算接下来n个步长所缺失的估计控制向量;有了上述相邻auv的信息,mpc子控制器将相关信息代入优化函数式(3.3)其中,z-i
(s;t
c
)为控制器收到的相邻auv状态值,除了以上的优化函数,控制器计算过程中还需要保证系统满足以下条件及约束z
i
(s;t
c
),z-i
(s;t
c
)∈z
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3.4.1)u
i
(s;t
c
)∈u
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3.4.2)z
i
(t
c
;t
c
)=z
i
(t
c
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3.4.3)
z
i
(t
c
t
p
;t
c
)∈φ
i
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3.4.4)(3.4.4)其中,s∈[t
c
,t
c
t
p
],z
i
(s;t
c
)∈z和z
i
(t
c
t
p
;t
c
)∈φ
i
分别表示状态约束和终端约束条件;在优化问题中代价函数定义如下式其中f
i
和φ
i
分别为φ
i
(z
i
(t))=γ∑||m(t)||2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3.5.2)上式中||
·
||为n维空间中任一矢量的范数表示,a表示多auv系统中的成对的auv的组合,假设auv系统通信网络为一个无向图,即若(i,j)∈a,那么对于auv
i
∈a,则有(j,i)∈a且α、β和γ为加权系数,g(t)和m(t)可根据编队过程中的需求进行选择;代价函数具体表示如式(3.6)、式(3.7)代价函数具体表示如式(3.6)、式(3.7)代价函数具体表示如式(3.6)、式(3.7)代价函数具体表示如式(3.6)、式(3.7)式中,α、β、γ均为加权系数,其中表示对第i个auv控制序列的约束,μ、ρ分别为对参考距离d
i
和相邻auv视线角度σ
i
的权重系数的权重系数表示当前auv与子系统其他auv间的预测横坐标差值,表示当前auv与子系统其他auv间的预测纵坐标差值,d
i
为当前auv与相邻auv之间期望距离,且d1cosθ1,d2cosθ1分别表示当前auv和auv2,auv3之间的期望横坐标差值,d1sinθ1,d2sinθ1则表示当前auv和auv2,auv3之间的期望纵坐标差值;经过以上优化函数,控制器将计算出固定n个控制周期内的最优控制序列4.一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1所述的方法。5.一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执
行时用于实现权利要求1所述的方法。
技术总结
本发明涉及一种基于改进式分布式模型预测的大通信周期AUV编队方法,此方法既可以克服传统领航-跟随者法计算量大、通信信道堵塞的问题,还可以很好的解决使用大通信周期水声通信设备时对系统造成的控制延迟或失效的影响。利用本发明提出的方法对邻近AUV的状态向量进行更新,系统可以有效克服通信间隔时间久引起的模型预测控制算法的失效。此外,利用本发明提出的方法除了可用在水下AUV编队中,还可以用在陆上或水面存在大面积障碍物导致的通信周期过长的编队问题中。通信周期过长的编队问题中。通信周期过长的编队问题中。
技术研发人员:高剑 陈依民 韩奋祥 张福斌 潘光 张立川 张飞虎
受保护的技术使用者:西北工业大学
技术研发日:2022.08.25
技术公布日:2022/12/12
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。