1.本发明属于航天器返回与着陆技术领域,涉及一种基于可控翼伞实现运载火箭助推器多目标点归航和避障控制进而实现运载火箭助推器落区控制的方法。
背景技术:
2.助推器与火箭主体分离上升到最高点后自由坠落,到达20km以下时,助推器的速度、姿态趋于稳定,回收系统开始启动,各级降落伞逐级开伞降低助推器下降速度,末级的翼伞开伞稳定后,在归航系统的控制下,按预定程序完成归航和着陆。采用大型翼伞回收助推器过程见图1。
3.运载火箭助推器在完成助推起飞功能后与主体分离,在无控情况下自由坠落到地面,其散布范围达2000km2以上。采用具有滑翔能力的翼伞,利用其滑翔能力可以有效缩小散布范围。在翼伞归航能力不足以覆盖全部落区范围的情况下,针对落区散布特征,采用可控翼伞无法实现运载火箭助推器精确可控回收,也难以避开村庄、乡镇等无法降落区域,所以急需设计一种带避障功能多目标归航方法,以达到更好的归航效果。
技术实现要素:
4.本发明的目的在于克服上述缺陷,提供一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,首先在运载火箭助推器落区范围内确定多个目标点和避障点,翼伞开始工作后,锁定多个目标点中的最优目标点,接着进行飞行阶段判断,通过翼伞高度和距离组合判断翼伞所处的飞行阶段并对其进行相应控制。在定向归航阶段,翼伞朝向最优目标点飞行;盘旋销高阶段,翼伞围绕最优目标点盘旋下降;避障飞行阶段,翼伞向着翼伞和最近避障点连线方向的反方向作避障飞行,如果翼伞处于远离最近避障区状态,则翼伞重新进入定向归航阶段,翼伞继续向最优目标点飞行;逆风着陆阶段,控制系统将翼伞的飞行方向调整成和风向来流方向相反的方向,借助风力进一步降低翼伞的水平飞行速度;雀降着陆阶段,翼伞的水平和垂直速度同时降低到最小值。本发明针对落区目标点和避障区,在稳定高效降落的前提下实现了对避障区的精准规避,对航天器返回与着陆技术领域相关研究具有深远意义。
5.为实现上述发明目的,本发明提供如下技术方案:
6.一种采用可控翼伞实现火箭助推器多目标定点回收避障方法,包括如下步骤:
7.s1确定火箭助推器落区范围内的>1个目标点和>1个避障区,将避障区的几何中心作为避障点;
8.s2使翼伞进入最优目标点锁定模式,根据翼伞的飞行状态参数在>1个目标点中锁定最优目标点;
9.s3获取翼伞的飞行状态参数,所述翼伞的飞行状态参数包括翼伞高度信息,翼伞与最优目标点的距离,以及翼伞与最近避障点的距离;
10.s4根据翼伞的飞行状态参数使翼伞进入定向归航模式,盘旋销高模式,避障飞行
模式,逆风着陆模式或雀降着陆模式;
11.s5循环进行步骤s2~s4,实现火箭助推器的实时精确回收及避障飞行。
12.进一步的,记翼伞高度为h,翼伞与最优目标点的距离为ds,翼伞与最近避障点的距离为bgdis,所述步骤s4的具体步骤包括:
13.s4.1判断h是否≤逆风高度nfhight,如果是,翼伞进入逆风着陆模式,如果否,进入步骤s4.2;
14.s4.2判断h是否≤雀降高度qjhight,如果是,翼伞进入雀降着陆模式,如果否,进入步骤s4.3;
15.s4.3判断是否同时满足h≥避障模式判断高度bghight且ds>盘旋距离pxdis,如果是进入定向归航模式,如果否进入步骤s4.4;
16.s4.4判断是否同时满足h≥避障模式判断高度bghight且ds≤盘旋距离pxdis,如果是进入盘旋销高模式,如果否进入步骤s4.5;
17.s4.5判断是否同时满足h《避障模式判断高度bghight且bgdis≤避障安全距离bgaqdis,如果是进入避障飞行模式,如果否进入步骤s4.6;
18.s4.6进入定向归航模式。
19.进一步的,定向归航模式时,翼伞沿与最优目标点的连线向最优目标点直线靠近;
20.盘旋销高模式时,翼伞围绕最优目标点盘旋下降;
21.避障飞行模式时,翼伞沿与最近避障点的连线直线远离最近避障点;
22.逆风着陆模式时,翼伞沿与风向来流方向相反方向飞行;
23.雀降着陆模式时,翼伞的水平和垂直速度同时降低到最小值。
24.进一步的,所述步骤s2中,最优目标点为与翼伞投影点距离最近的目标点;
25.所述步骤s3中,最近避障点为与翼伞投影点距离最近的避障点。
26.进一步的,所述步骤s2中,最优目标点的锁定方法如下:
27.s2.1根据如下公式计算翼伞投影点与每个目标点的距离:
[0028][0029]
其中,distance为翼伞投影点距离任一目标点距离,radius为地球半径,la_para为翼伞投影点纬度,lon_para为翼伞投影点经度,la_destination为任一目标点纬度,lon_destination为任一目标点经度;
[0030]
s2.2将距离翼伞投影点最近目标点设为最优目标点。
[0031]
进一步的,所述步骤s4中,将避障区等效为圆形区域,避障安全距离bgaqdis为避障区的几何中心至避障区边缘的距离;
[0032]
进一步的,所述步骤s4中,避障模式判断高度bghight的确定方法为:
[0033]
bghight≥bgaqdis/ra;
[0034]
其中,bgaqdis为避障安全距离,ra为翼伞的滑翔比。
[0035]
进一步的,所述步骤s4中,雀降高度qjhight的确定方法为:
[0036][0037]
其中,s
p
为翼伞的下降速度,单位为mm/s;sm为电机的转速,单位为r/min;l为翼伞
的最大操纵量,r为电机的绞盘半径,l和r的单位为mm;雀降高度qjhight的单位为mm;
[0038]
所述步骤s4中,逆风高度nfhight的确定方法为:
[0039]
nfhight≥2
×
π
×rp
/ra qjhight;
[0040]
其中,r
p
为翼伞最小转弯半径;ra为翼伞的滑翔比。
[0041]
进一步的,所述步骤s4中,盘旋距离pxdis的确定方法为:
[0042]
2r
p
≥pxdis≥r
p
;
[0043]
其中,r
p
为翼伞最小转弯半径。
[0044]
进一步的,所述s2中,首先使翼伞进入翼伞稳定模式,对控制程序进行初始化并将翼伞调整到待操纵状态,再使翼伞进入最优目标点锁定模式。
[0045]
本发明与现有技术相比具有如下有益效果:
[0046]
(1)本发明针对目标点和避障区创新性的提出了一种可控翼伞实现火箭助推器多目标定点回收避障方法,在稳定高效降落的前提下实现了对避障区的精准规避;
[0047]
(2)本发明方法能够实时更新最优目标点,并根据翼伞的实时飞行状态参数对翼伞的控制模式进行实时判断,对翼伞回收避障的整体过程实现了有效控制;
[0048]
(3)本发明方法针对翼伞回收避障需求设计了多种模式,同时创新性的提出了各模式的转换方法,能够满足翼伞回收避障过程的复杂状态,实现了自动化控制。
附图说明
[0049]
图1为现有技术中大型翼伞精确回收火箭助推器示意图
[0050]
图2为本发明实施例1中助推器落区示例图;
[0051]
图3为本发明实施例1飞行阶段转换图;
[0052]
图4为本发明翼伞回收避障飞行段进入避障区归航轨迹;
[0053]
图5为本发明翼伞回收避障飞行段未进入避障区归航轨迹;
[0054]
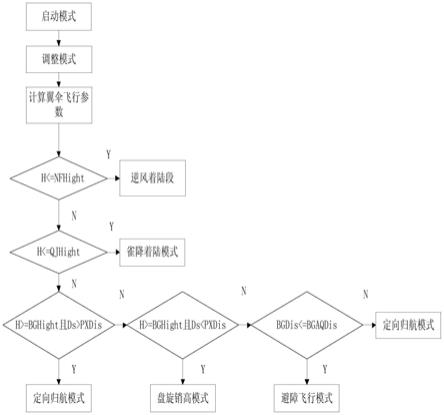
图6助推器回收用翼伞多目标点回收避障控制飞行程序框图。
具体实施方式
[0055]
下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
[0056]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0057]
运载火箭助推器在完成助推起飞功能后与主体分离,在无控情况下自由坠落到地面,其散布范围达2000km2以上。采用具有滑翔能力的翼伞,利用其滑翔能力可以有效缩小散布范围。通常翼伞的归航可以采用定点归航、定线归航或多目标归航等方式。在翼伞归航能力不足以覆盖全部落区范围的情况下,针对落区散布特征,采用带避障功能多目标归航方法,可以达到更好的归航效果。
[0058]
本发明通过计算锁定多个目标点中的最优目标点,并在飞行过程中不断更新最优目标点信息并操纵翼伞朝向最优目标点飞行。在避障飞行阶段,翼伞控制器将通过算法计算出最近避障点和离最近避障点的高度和距离。当翼伞进入最近避障区范围内时,将操纵
翼伞向着翼伞和最近避障点连线方向的反方向作避障飞行。如果翼伞处于远离最近避障区状态,则操纵翼伞继续向最优目标点飞行。
[0059]
在可控翼伞回收的过程中,本发明将翼伞的飞行轨道设计分为:翼伞稳定段、最优目标点锁定段、定向归航段、避障点识别段、避障飞行段、盘旋销高段、逆风着陆段、雀降着陆段。
[0060]
助推器回收用翼伞的避障飞行程序框图见图6所示。翼伞开始工作后,首先进入翼伞稳定段,在这一阶段翼伞展开,进入启动和调整模式,其中启动模式为控制程序初始化。调整模式为将翼伞调整到待操纵状态。在最优目标点锁定段通过计算锁定多个目标点中的最优目标点,接着会计算翼伞的飞行状态参数:包括翼伞经度、纬度、姿态、高度(h)、速度、距离最优目标点距离(ds)、距离最近避障点距离(bgdis)等。接着在避障点识别段进行飞行阶段判断,翼伞控制器通过算法计算出最近避障点,通过翼伞距离最优目标点的距离和距离最近避障点的距离判断所处的飞行阶段。
[0061]
当翼伞高度小于逆风高度(nfhight)时,控制器会操纵翼伞进入逆风着陆模式。当翼伞高度小于雀降高度(qjhight)时,控制器会操纵翼伞进入雀降着陆模式。当翼伞高度大于避障模式判断高度(bghight)且翼伞与目标点距离大于盘旋距离(pxdis)时,进入定向归航模式。当翼伞高度大于避障模式判断高度(bghight)且翼伞与目标点距离小于盘旋距离(pxdis)时,进入盘旋销高模式。当翼伞高度小于避障模式判断高度(bghight)且翼伞与避障点距离(bgdis)小于避障安全距离(bgaqdis)时,进入避障飞行模式,控制系统操纵翼伞向翼伞点和避障点连线反方向飞行。当翼伞高度小于避障模式判断高度(bghight)且翼伞与避障点距离(bgdis)大于避障安全距离(bgaqdis)时,翼伞仍然进入定向飞行段并向目标点方向飞行。
[0062]
各模式的工作方式为:
[0063]
定向归航模式:主要工作过程为操纵翼伞飞行方向指向目标点连线方向,使翼伞向目标点直线靠近。
[0064]
盘旋销高模式:在翼伞距离目标点较近(进入固定盘旋半径的范围内)但高度较高大于避障判断高度(bghight)时,操纵翼伞围绕目标点盘旋下降。
[0065]
避障飞行模式:操纵翼伞远离避障区飞行,飞行方向为翼伞和避障点连线反方向。
[0066]
逆风着陆模式:当剩余高度小于最小逆风高度(nfhight)时,控制系统将翼伞的飞行方向调整成和风向来流方向相反的方向,借助风力进一步降低翼伞的水平飞行速度。
[0067]
雀降着陆:当剩余高度小于最小雀降高度(qjhight)时,将双边操纵量同时快速下拉到最大值,使翼伞的水平和垂直速度同时快速降低到最小值。
[0068]
一、最优目标点的计算方法为:
[0069]
1.计算翼伞投影点与每个目标点的距离,计算方法见下式(1):
[0070][0071]
distance——翼伞投影点距离目标点距离;
[0072]
radius——地球半径;
[0073]
la_para——翼伞投影点纬度;
[0074]
lon_para——翼伞投影点经度;
[0075]
la_destination——翼伞目标点纬度;
[0076]
lon_destination——翼伞目标点经度。
[0077]
2.对翼伞投影点与每个目标点距离进行排序:
[0078]
3.将距离翼伞投影点最近目标点设为最优目标点。
[0079]
实施例1:
[0080]
为了采用可控翼伞实现运载火箭助推器精确可控回收,且避开村庄、乡镇等无法降落区域。本实施例采取的方法如下:
[0081]
如图2,火箭助推器落区的范围约为70km
×
30km的矩形区域,即中心点向前35km,向后35km,左右各15km,abcd四点为落区四个端点。在落区内选择5个目标点,助推器下降过程中,伞分系统择优选择落区内的目标点,并将助推器引导至最近的目标点进行降落,k、l、m、n、o五个点为落区五个目标点。助推器再入需规避落区内的6个村镇,以红框标明,e、f、g、h、i、j为落区需要规避的6个村镇,每个村镇需规避的范围是半径为bgaqdis的圆面积。5个目标点和6个避障点在火箭发射前装订,即在火箭起飞前提前输入助推器翼伞精确回收控制器。
[0082]
在定向归航阶段,翼伞在飞行过程中不断更新最优目标点并操纵翼伞朝向最优目标点飞行。在避障飞行阶段,当翼伞进入最近避障区范围时,将操纵翼伞朝向翼伞和最近避障点连线方向的反方向作避障飞行。当翼伞在避障区范围外,将继续朝向最优目标点飞行。
[0083]
具体的,如图6,记翼伞高度为h,翼伞与最优目标点的距离为ds,翼伞与最近避障点的距离为bgdis;
[0084]
当h≤逆风高度nfhight时,翼伞进入逆风着陆模式。
[0085]
当h≤雀降高度qjhight时,翼伞进入雀降着陆模式。
[0086]
当h≥避障模式判断高度bghight且ds>盘旋距离pxdis时,进入定向归航模式;
[0087]
当h≥避障模式判断高度bghight且ds≤盘旋距离pxdis时,进入盘旋销高模式;
[0088]
当h<避障模式判断高度bghight且bgdis≤避障安全距离bgaqdis时,进入避障飞行模式;
[0089]
当h<避障模式判断高度bghight且bgdis>避障安全距离bgaqdis时,进入定向归航模式。
[0090]
最优目标点的计算方法为:
[0091]
1.计算翼伞投影点与每个目标点的距离,计算方法见下式(1):
[0092][0093]
distance——翼伞投影点距离目标点距离;
[0094]
radius——地球半径;
[0095]
la_para——翼伞投影点纬度;
[0096]
lon_para——翼伞投影点经度;
[0097]
la_destination——翼伞目标点纬度;
[0098]
lon_destination——翼伞目标点经度。
[0099]
2.将第一个目标点设为最优目标点,翼伞投影点与第一个目标点距离设为最小目标点距离,将翼伞与其它目标点距离与其比较,如有距离更近目标点,则将该目标点替换为最优目标点。
[0100]
二、最近避障点的计算方法为:
[0101]
1.计算翼伞投影点与每个避障点的距离,计算方法仍采用公式(1),将目标点的经度和纬度替换为避障点的经度和纬度。
[0102]
2.将第一个避障点设为最近避障点,翼伞投影点与第一个避障点距离设为最近避障点距离,将翼伞与其它避障点距离与其比较,如有距离更近避障点,则将该避障点替换为最近避障点。
[0103]
三、各阶段转换条件的计算方法为:
[0104]
避障安全距离(bgaqdis)的计算方法:避障安全距离由避障区面积决定。为避障区中心点至避障区边缘距离。
[0105]
避障模式判断高度(bghight)的计算方法:假设翼伞的滑翔比为ra,则翼伞在预留的避障模式判断高度bghight开始判断距离避障点的距离,此时翼伞可以飞行的机动能力bgflightdis=bghight
×
ra;则翼伞的飞行机动能力需大于避障安全距离才可以保证翼伞可以飞离避障区域。则:bgflightdis≥bgaqdis,即bghight*ra≥bgaqdis,则bghight≥bgaqdis/ra;
[0106]
雀降高度(qjhight):翼伞雀降的目的是在翼伞落地前将翼伞的操纵量下拉至最大操纵量,从而使翼伞的下落速度迅速降至零。假设翼伞的最大操纵量为l(mm)(毫米),电机的转速为sm(r/min)(转/分钟);电机的绞盘半径为r(mm)(毫米);则翼伞雀降时间(qjtime)为:假设翼伞的下降速度为s
p
,则雀降高度
[0107]
盘旋距离(pxdis):在翼伞操纵量全下拉时,其转弯半径最小,最小转弯半径可以由试验获得。假设最小转弯半径为r
p
,则2
×rp
≥pxdis≥r
p
。
[0108]
逆风高度(nfhight):翼伞逆风着陆的目的是在翼伞落地前将翼伞的飞行方向操纵至与风的来流方向相反的方向,从而最大程序减小翼伞的水平飞行速度。逆风高度nfhight的确定方法为:(nfhight-qjhight)*ra≥2*π*r
p
;则nfhight≥2
×
π
×rp
/ra qjhight;其中,r
p
为翼伞最小转弯半径;ra为翼伞的滑翔比;qjhight为翼伞雀降开始高度。
[0109]
翼伞阶段转换关系见图3,飞行过程示意图见图4和图5,其中图4为翼伞回收避障飞行段进入避障区归航轨迹,图5为翼伞回收避障飞行段未进入避障区归航轨迹。
[0110]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
[0111]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
