1.本发明涉及铁路工程隧道施工领域,特别是一种基于大数据的盾构姿态控制方法及系统。
背景技术:
2.盾构法施工具有安全性高、适用性强、施工高效等优点。然而地下环境复杂,导致盾构机在掘进施工过程中易发生失准,严重影响施工进度及质量,并造成成本的增加。盾构失准已成为国内铁路工程隧道施工领域一个亟待解决的问题。
3.实际工程中,通常在盾构机失准后再对其盾构姿态进行调整,这使得姿态调整具有滞后性。尽管神经网络等方法的引入克服了姿态调整滞后性的问题,但由于地质条件的天然随机性,难以保证预测精度。因此,急需一种基于大数据的盾构姿态控制方法及系统。
技术实现要素:
4.本发明解决的技术问题是:克服现有技术无法在超前预测盾构姿态发生偏移时考虑地质条件随机性的问题。
5.本发明的技术解决方案是:一种基于大数据的盾构姿态控制方法,包括以下步骤:步骤1:收集既有隧道盾构参数样本,盾构参数包括掌子面土体粘聚力、内摩擦角和盾构机姿态偏移量。
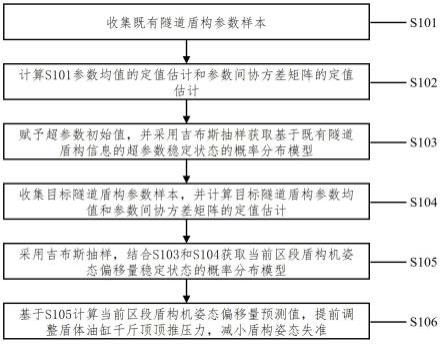
6.步骤2:基于步骤1收集的既有隧道盾构参数样本计算每个隧道的盾构参数均值和参数间协方差矩阵的定值估计。
7.步骤3:对每个隧道,基于步骤1和步骤2获得的既有隧道盾构参数样本、参数均值的定值估计、参数间协方差矩阵的定值估计以及超参数的初始值,根据参数均值、参数间协方差矩阵和超参数的概率分布模型,采用吉布斯抽样更新既有隧道盾构参数均值、参数间协方差矩阵和超参数概率分布模型的分布参数,直到更新后的分布参数与前一次分布参数的差值在设定范围内,停止抽样,判定既有隧道盾构参数均值、参数间协方差矩阵和超参数的概率分布模型的分布参数达到稳定状态。
8.步骤4:对于目标隧道,收集已完成区段盾构参数样本,并采用超前钻探收集当前区段掌子面土体粘聚力、内摩擦角样本,计算目标隧道盾构参数均值和参数间协方差矩阵的定值估计(参数样本包含已完成区段和当前区段所有样本,其中当前区段盾构机姿态偏移量q被赋予初始值q0)。
9.步骤5:依据步骤3得到的既有隧道超参数稳定状态的概率分布模型的抽样值作为超参数初始值,结合步骤4中的收集到的目标隧道盾构参数样本、参数均值的定值估计和参数间协方差矩阵的定值估计,采用吉布斯抽样更新超参数、目标隧道盾构参数均值、目标隧道盾构参数间协方差矩阵和当前区段盾构机姿态偏移量的概率分布模型的分布参数,直到更新后的分布参数与前一次分布参数的差值在设定范围内,停止抽样,判定超参数、目标隧道盾构参数均值、目标隧道盾构参数间协方差矩阵和当前区段盾构机姿态偏移量的概率分
布模型的分布参数达到稳定状态。
10.步骤6:基于步骤5中当前区段盾构机姿态偏移量稳定状态的概率分布模型进行c次抽样,计算其平均值作为盾构机姿态偏移量预测值qe,提前调整盾体油缸千斤顶顶推压力,减小盾构姿态失准。
11.进一步的,所述步骤3中超参数包括μh、ch、∑h和νh,其中:μh为广义均值向量,服从正态分布;ch为广义协方差矩阵,服从逆威沙特分布(iw分布);∑h为尺度矩阵,服从威沙特分布(w分布);νh为自由度,服从均匀分布。
12.进一步的,所述步骤3中超参数的初始值为随机值,μh,ch及既有隧道盾构参数样本共同控制既有隧道盾构参数均值的分布,∑h,νh及既有隧道盾构参数样本共同控制既有隧道盾构参数间协方差矩阵的分布。
13.一种基于大数据的盾构姿态控制系统包括信息采集模块、处理模块和姿态调整模块;信息采集模块用于采集既有隧道盾构参数样本和目标隧道盾构参数样本;处理模块用于根据信息采集模块采集的既有隧道盾构参数样本,通过吉布斯抽样获取既有隧道超参数稳定状态的概率分布模型的分布参数;根据目标隧道盾构参数样本结合既有隧道超参数稳定状态的概率分布模型,采用吉布斯抽样获取当前区段盾构机姿态偏移量稳定状态的的概率分布模型;计算当前区段盾构机姿态偏移量。
14.姿态调整模块用于根据当前区段盾构机姿态偏移量预测值,提前调整盾体油缸千斤顶顶推压力,减小盾构姿态失准。
15.发明与现有技术相比的优点在于:本发明实施例提供的方案,考虑地下环境的不确定性,采用层次分析法和吉布斯抽样方法,建立了一种将既有隧道盾构参数样本的大数据和目标隧道盾构参数样本的稀疏数据结合的盾构机姿态偏移量预测方法及系统。本发明为隧道盾构施工姿态失准预测及调整提供有力手段;分析方法清晰,可靠性强。
附图说明
16.图1为本发明实施例提供的盾构姿态控制方法的流程示意图。
具体实施方式
17.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
18.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.参照图1,示出了本发明实施例提供的一种基于大数据的盾构姿态控制方法,包括以下步骤:s101:收集m个既有隧道盾构参数样本x,每个隧道采集p个参数样本,盾构参数包括掌子面土体粘聚力、内摩擦角和盾构机姿态偏移量。
20.s102:基于s101收集的既有隧道盾构参数样本x,对第i(1<i<m)个隧道计算其盾
构参数均值μi及参数间协方差矩阵ci的定值估计,重复上述步骤计算每个既有隧道盾构参数均值的定值估计和参数之间的协方差矩阵的定值估计。
21.s103:对超参数μh、ch、∑h和νh赋予初始值。其中μh为广义均值向量;ch为广义协方差矩阵;∑h为尺度矩阵;νh为广义自由度。(μh,ch和x)共同控制既有隧道盾构参数均值的分布,(∑h,νh和x)共同控制既有隧道盾构参数间协方差矩阵的分布,盾构参数均值、参数间协方差矩阵和超参数的概率分布模型如下:μh~n(f1(ch), f2(μi)):n代表正态分布,f1和f2为该分布两参数,其中第一个参数是ch的函数,第二个参数是μi的函数;ch~iw(f3(μi), m a 1):iw代表逆威沙特分布,f3为该分布第一个参数,该参数是μi的函数, a为盾构参数个数a=3;νh~u(a,1000):u代表均匀分布;∑h~w(f4(ci),m*νh a 2):w代表威沙特分布,f4为该分布第一个参数,第一个参数是ci的函数;μi~ n(f5(c
h ,μh,ci),),f6(c
h ,ci)): f5和f6为该分布两参数,其中第一个参数是c
h 、μh、ci和的函数,x
i,j
为第i个既有隧道第j个盾构参数样本值,第二个参数是c
h 和ci的函数;ci~iw(f7(∑h,μi,),p νh):f7为该分布第一个参数,该参数是∑h、μi和的函数。
22.对既有隧道,基于s102获得的盾构参数均值的定值估计、协方差矩阵的定值估计、超参数初始值μ
i,0 ,c
i,0
,μ
h,0
、c
h,0
、∑
h,0
和ν
h,0
(μ
i,0
为第i个隧道盾构参数均值的定值估计,c
i,0
为第i个隧道的协方差矩阵的定值估计,μ
h,0
为广义均值向量初始值,c
h,0
为广义协方差矩阵初始值,∑
h,0
为尺度矩阵初始值,ν
h,0
为广义自由度初始值)以及盾构参数样本x,根据盾构参数均值、参数间协方差矩阵和超参数的概率分布模型,采用吉布斯抽样获取更新后的既有隧道盾构参数均值、参数间协方差矩阵以及超参数概率分布模型的分布参数,并基于更新后的分布参数进行吉布斯抽样,重复上述步骤t次,直到第t次抽样得到的分布参数与第t 1次分布参数之间的差值在设定范围内,判定既有隧道第t 1次抽样得到的分布参数为既有隧道盾构参数均值、参数间协方差矩阵和超参数概率分布模型的分布参数达到稳定状态。
23.s104:收集目标隧道盾构参数样本xu,xu包括x
u,1
和q: x
u,1
包括已完成区段盾构参数样本以及采用超前钻探收集当前区段掌子面土体粘聚力、内摩擦角样本;q为当前区段盾构机姿态偏移量参数,初始时赋予当前区段盾构机姿态偏移量随机数值q0。基于参数样本x
u,1
计算目标隧道盾构参数均值μu的定值估计μ
u,1
和参数间协方差矩阵cu的定值估计c
u,1
。
24.s105: 基于s103既有隧道超参数稳定状态的概率分布模型的抽样值μ
h,t
、c
h,t
、∑
h,t
,ν
h,t
作为初始值,s104得到的μ
u,1
,和c
u,1
作为目标隧道盾构参数均值、参数间协方差矩阵的初始值,结合盾构参数均值、参数间协方差矩阵、超参数和q的概率分布模型,其中:q~n(f8(q,μu,cu,x
u,1
),f9(cu)):f8和f9为该分布两参数,其中第一个参数是q,μu,cu,x
u,1
的函数,第二个参数是cu的函数。
25.采用吉布斯抽样更新超参数、目标隧道盾构参数均值、参数间协方差矩阵和当前区段盾构机姿态偏移量的概率分布模型的分布参数,直到更新后的分布参数与前一次分布参数的差值在设定范围内,停止抽样,判定目标隧道盾构参数均值、参数间协方差矩阵、超参数和当前区段盾构机姿态偏移量概率分布模型的分布参数达到稳定状态。
26.s106: 基于s105中当前区段盾构机姿态偏移量稳定状态的概率分布模型进行c次抽样,计算其平均值作为当前区段盾构机姿态偏移量预测值qe,提前调整盾体油缸千斤顶顶推压力,减小盾构姿态失准。
27.本发明实施例提供的方案,建立了既有隧道盾构参数样本的大数据和目标隧道盾构参数样本的稀疏数据结合的盾构机姿态偏移量预测方法及系统,对隧道盾构施工中盾构机偏移量进行超前预测,有助于盾构机姿态的超前纠偏,从而避免产生严重的偏移。
28.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者装置不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者装置所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者装置中还存在另外的相同要素。
29.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
