1.本发明涉及机器人技术领域,特别是一种结构紧凑、稳定性好、运动空间大的基于刚性气动执行元件的仿人机器人。
背景技术:
2.目前的关节型仿人机器人基本在关节处采用铰链连接,按照铰链运动的自由度数,可以分为1个自由度、2个自由度、3个自由度的铰链。这样就限制了机器人运动的自由度和运动的范围,为此提出非关节铰链连接的机器人。
3.稳定性是机器人一个重要的分支,稳定性好的机器人工作效率高,避免与周围环境碰撞损坏,同时机器人的稳定性对于轨迹跟踪极为重要,三角形具有较好的稳定性。平行四边形具有最大范围节省空间、提高运动范围的优势。
4.需要一种结构紧凑、稳定性好、运动空间大的基于刚性气动执行元件的仿人机器人。
技术实现要素:
5.本发明的目的是提供一种结构紧凑、稳定性好、运动空间大的基于刚性气动执行元件的仿人机器人。
6.一种基于刚性气动执行元件的仿人机器人,包括:
7.腰关节,所述腰关节的上部为上肢关节,下部为下肢关节,所述上肢关节的两侧分别对称设置左上肢和右上肢,所述下肢关节的两侧分别对称设置左下肢和右下肢;
8.所述腰关节上中下分别为腰关节上端板、腰关节中间板、腰关节下端板,所述腰关节上端板、腰关节中间板的两端分别铰接腰关节气缸一、腰关节气缸二、腰关节气缸三、腰关节气缸四、腰关节气缸九、腰关节气缸十、腰关节气缸十一、腰关节气缸十二,所述腰关节中间板、腰关节下端板的两端分别铰接腰关节气缸五、腰关节气缸六、腰关节气缸七、腰关节气缸八、腰关节气缸十三、腰关节气缸十四、腰关节气缸十五、腰关节气缸十六;
9.所述腰关节上端板固定连接气动马达一的壳体,所述气动马达一的转动轴固定连接连接件一,所述连接件一和肘关节固定连接,所述肘关节分别同上肢气缸一和上肢气缸二可转动连接,所述上肢气缸一和上肢气缸二分别可转动连接腕关节连接板,所述腕关节连接板分别固定连接滑台气缸一、滑台气缸二,所述滑台气缸一、滑台气缸二分别固定连接连接件二、连接件三;
10.所述腰关节下端板的可转动连接大腿骨,所述大腿骨和小腿骨可转动连接,所述小腿骨和脚可转动连接,所述腰关节下端板后侧、大腿骨的左右两侧分别可转动连接下肢气缸一、下肢气缸二的两端,所述大腿骨、小腿骨分别可转动连接下肢气缸三的两端,所述小腿骨和脚分别可转动连接下肢气缸四、下肢气缸五的两端。
11.所述腰关节气缸一和腰关节气缸九、腰关节气缸三和腰关节气缸十、腰关节气缸五和腰关节气缸十三、腰关节气缸七和腰关节气缸十四分别相交,所述腰关节气缸一、腰关
节气缸二、腰关节气缸三、腰关节气缸四、腰关节气缸五、腰关节气缸六、腰关节气缸七、腰关节气缸八分别向右倾斜,所述腰关节气缸九、腰关节气缸十、腰关节气缸十一、腰关节气缸十二、腰关节中间板、腰关节气缸十三、腰关节气缸十四、腰关节气缸十五、腰关节气缸十六分别向左倾斜。
12.所述腰关节上端板、腰关节中间板、腰关节下端板分别为长方形。
13.所述腰关节上端板、腰关节中间板、腰关节下端板上铰接处分别设有长方体肩台。
14.所述连接件二、连接件三分别为l形,互为镜像。
15.所述肘关节的丝杠固定连接气动马达二的转动轴,所述气动马达二的壳体固定连接连接件五,所述丝杠和螺母啮合,所述连接件五和连接件六可转动连接,所述连接件六和连接件七固定连接,所述螺母的两端分别可转动连接连接件四、连接件八,所述连接件四、连接件八分别可转动连接连接件六,所述连接件六和连接件五可转动连接。
16.所述下肢气缸四的长度大于下肢气缸五的长度。
17.所述一种基于刚性气动执行元件的仿人机器人还设有计算机,所述计算机通过开关量控制系统控制滑台气缸松开与夹紧,所述滑台气缸包括滑台气缸一、滑台气缸二,所述计算机通过模拟量控制系统控制气缸与气动马达,传感器检测到的气动元件的气压、角位移、线位移反馈给计算机实现闭环控制。所述气缸与气动马达包括腰关节气缸一、腰关节气缸二、腰关节气缸三、腰关节气缸四、腰关节气缸五、腰关节气缸六、腰关节气缸七、腰关节气缸八、腰关节气缸九、腰关节气缸十、腰关节气缸十一、腰关节气缸十二、腰关节中间板、腰关节气缸十三、腰关节气缸十四、腰关节气缸十五、腰关节气缸十六、气动马达一、上肢气缸一、上肢气缸二、气动马达二、下肢气缸一、下肢气缸二、下肢气缸三、下肢气缸四、下肢气缸五。
18.本发明腰关节的上部为上肢关节,下部为下肢关节,上肢关节的两侧分别对称设置左上肢和右上肢,下肢关节的两侧分别对称设置左下肢和右下肢;腰关节上中下分别为腰关节上端板、腰关节中间板、腰关节下端板,腰关节上端板、腰关节中间板的两端分别铰接腰关节气缸一、腰关节气缸二、腰关节气缸三、腰关节气缸四、腰关节气缸九、腰关节气缸十、腰关节气缸十一、腰关节气缸十二,所述腰关节中间板、腰关节下端板的两端分别铰接腰关节气缸五、腰关节气缸六、腰关节气缸七、腰关节气缸八、腰关节气缸十三、腰关节气缸十四、腰关节气缸十五、腰关节气缸十六;腰关节上端板固定连接气动马达一的壳体,气动马达一的转动轴固定连接连接件一,连接件一和肘关节固定连接,肘关节分别同上肢气缸一和上肢气缸二可转动连接,上肢气缸一和上肢气缸二分别可转动连接腕关节连接板,腕关节连接板分别固定连接滑台气缸一、滑台气缸二,滑台气缸一、滑台气缸二分别固定连接连接件二、连接件三;腰关节下端板的可转动连接大腿骨,大腿骨和小腿骨可转动连接,小腿骨和脚可转动连接,腰关节下端板后侧、大腿骨的左右两侧分别可转动连接下肢气缸一、下肢气缸二的两端,大腿骨、小腿骨分别可转动连接下肢气缸三的两端,小腿骨和脚分别可转动连接下肢气缸四、下肢气缸五的两端。本发明结构紧凑、稳定性好、运动空间大。
19.本发明的有益效果是:
20.(1)本发明利用三角形与平行四边形组合,既保证了关节的稳定性,又节省空间提高运动范围;
21.(2)本发明采用串并混联组合,兼顾串联机器人的优点与并联机器人的优点;
22.(3)本发明腰关节、髋关节、膝关节、踝关节、肩关节、肘关节、腕关节分别具有6、3、1、1、1、1、3个自由度,可以形象地模拟人的关节实现的各种动作。
附图说明
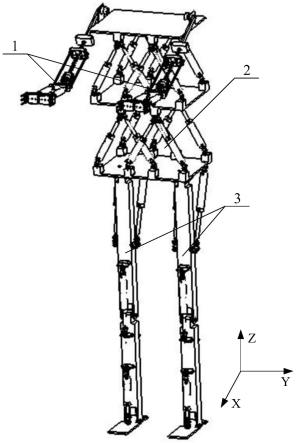
23.图1是基于刚性气动执行元件的仿人机器人总体机械机构图;
24.图2是基于刚性气动执行元件的仿人机器人腰关节机械机构图;
25.图3是基于刚性气动执行元件的仿人机器人上肢机械机构图;
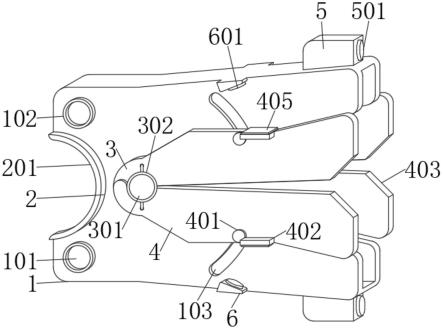
26.图4是基于刚性气动执行元件的仿人机器人肘关节机械机构图;
27.图5是基于刚性气动执行元件的仿人机器人下肢机械机构图;
28.图6是基于刚性气动执行元件的仿人机器人控制系统方框图;
29.图中:上肢关节1、左上肢1-1、右上肢1-2、腰关节2、下肢关节3、左下肢3-1、右下肢3-2、腰关节气缸一4、腰关节气缸二5、腰关节气缸三6、腰关节气缸四7、腰关节气缸五8、腰关节气缸六9、腰关节气缸七10、腰关节气缸八11、腰关节上端板12、腰关节气缸九13、腰关节气缸十14、腰关节气缸十一15、腰关节气缸十二16、腰关节中间板17、腰关节气缸十三18、腰关节气缸十四19、腰关节气缸十五20、腰关节气缸十六21、腰关节下端板22、气动马达一23、连接件一24、肘关节25、上肢气缸一26、上肢气缸二27、滑台气缸一28-1、滑台气缸二28-2、连接件二29、腕关节连接板30、连接件三31、丝杠32、螺母33、连接件四34、气动马达二35、连接件五36、连接件六37、连接件七38、连接件八39、下肢气缸一40、下肢气缸二41、大腿骨42、下肢气缸三43、小腿骨44、下肢气缸四45、下肢气缸五46、脚47、计算机48、开关量控制系统49、滑台气缸50、模拟量控制系统51、气缸与气动马达52、气动元件的气压、角位移、线位移53。
具体实施方式
30.以下结合附图和具体实施例,对本发明做进一步说明。
31.一种基于刚性气动执行元件的仿人机器人,包括:上肢关节1、左上肢1-1、右上肢1-2、腰关节2、下肢关节3、左下肢3-1、右下肢3-2、腰关节气缸一4、腰关节气缸二5、腰关节气缸三6、腰关节气缸四7、腰关节气缸五8、腰关节气缸六9、腰关节气缸七10、腰关节气缸八11、腰关节上端板12、腰关节气缸九13、腰关节气缸十14、腰关节气缸十一15、腰关节气缸十二16、腰关节中间板17、腰关节气缸十三18、腰关节气缸十四19、腰关节气缸十五20、腰关节气缸十六21、腰关节下端板22、气动马达一23、连接件一24、肘关节25、上肢气缸一26、上肢气缸二27、滑台气缸一28-1、滑台气缸二28-2、连接件二29、腕关节连接板30、连接件三31、丝杠32、螺母33、连接件四34、气动马达二35、连接件五36、连接件六37、连接件七38、连接件八39、下肢气缸一40、下肢气缸二41、大腿骨42、下肢气缸三43、小腿骨44、下肢气缸四45、下肢气缸五46、脚47、计算机48、开关量控制系统49、滑台气缸50、模拟量控制系统51、气缸与气动马达52、气动元件的气压、角位移、线位移53。
32.上肢关节1、腰关节2、下肢关节3。上肢关节1包括左上肢1-1、右上肢1-2,左上肢1-1与右上肢1-2结构完全相同;下肢关节3包括左下肢3-1、右下肢3-2,左下肢3-1与右下肢3-2结构完全相同。
33.腰关节气缸一4、腰关节气缸二5、腰关节气缸三6、腰关节气缸四7、腰关节气缸九
13、腰关节气缸十14、腰关节气缸十一15、腰关节气缸十二16两端分别与腰关节上端板12、腰关节中间板17可转动连接。腰关节气缸四7、腰关节气缸十14、腰关节气缸三6、腰关节气缸十一15在前侧,并且腰关节气缸四7与腰关节气缸十14、腰关节气缸三6与腰关节气缸十一15在上端交叉。腰关节气缸二5、腰关节气缸九13、腰关节气缸一4、腰关节气缸十二16在后侧,并且腰关节气缸二5与腰关节气缸九13、腰关节气缸一4与腰关节气缸十二16在上端交叉。
34.腰关节气缸五8、腰关节气缸六9、腰关节气缸七10、腰关节气缸八11、腰关节气缸十三18、腰关节气缸十四19、腰关节气缸十五20、腰关节气缸十六21两端分别与腰关节中间板17、腰关节下端板22可转动连接。腰关节气缸八11、腰关节气缸十四19、腰关节气缸七10、腰关节气缸十五20在前侧,并且腰关节气缸八11与腰关节气缸十四19、腰关节气缸七10与腰关节气缸十五20在上端交叉。腰关节气缸六9、腰关节气缸十三18、腰关节气缸五8、腰关节气缸十六21在后侧,并且腰关节气缸六9与腰关节气缸十三18、腰关节气缸五8与腰关节气缸十六21在上端交叉。
35.腰关节气缸一4、腰关节气缸二5、腰关节气缸三6、腰关节气缸四7、腰关节气缸九13、腰关节气缸十14、腰关节气缸十一15、腰关节气缸十二16、腰关节气缸五8、腰关节气缸六9、腰关节气缸七10、腰关节气缸八11、腰关节气缸十三18、腰关节气缸十四19、腰关节气缸十五20、腰关节气缸十六21一起驱动腰关节沿x轴、y轴、z轴移动和绕x轴、y轴、z轴转动。
36.气动马达一23的壳体、转动轴分别与腰关节上端板12、连接件一24固定连接,肘关节25与连接件一24固定连接。气动马达一23带动连接件一24相对于腰关节上端板12绕y轴转动。上肢气缸一26、上肢气缸二27两端分别与肘关节25、腕关节连接板30可转动连接,一起驱动腕关节连接板30相对于肘关节25绕z轴转动、沿x轴移动、沿y轴移动。滑台气缸一28-1、滑台气缸二28-2均与腕关节连接板30固定连接,滑台气缸一28-1、滑台气缸二28-2分别与连接件二29、连接件三31固定连接,控制滑台气缸一28-1、滑台气缸二28-2的伸缩实现沿y轴松开与夹紧的动作。
37.肘关节25包括丝杠32、螺母33、连接件四34、气动马达二35、连接件五36、连接件六37、连接件七38、连接件八39。气动马达二35的壳体、转动轴分别与连接件五36、丝杠32固定连接,螺母33与丝杠32啮合,连接件四34、连接件八39两端分别与螺母33、连接件六37可转动连接,连接件六37与连接件五36可转动连接,与连接件七38固定连接。气动马达二35正反转经过螺母33、连接件四34与连接件八39、连接件六37实现连接件六37相对于连接件五36绕y轴旋转。
38.大腿骨42与腰关节下端板22可转动连接,小腿骨44与大腿骨42、脚47可转动连接。下肢气缸一40、下肢气缸二41两端分别与腰关节下端板22后侧、大腿骨42左右两侧可转动连接,下肢气缸一40、下肢气缸二41一起驱动大腿骨42相对于腰关节下端板22绕x轴、y轴、z轴转动。在前侧下肢气缸三43两端分别与大腿骨42、小腿骨44可转动连接,驱动大腿骨42、小腿骨44之间绕y轴相对转动。下肢气缸四45、下肢气缸五46从前后两侧分别与小腿骨44、脚47可转动连接,并且下肢气缸四45的长度远大于下肢气缸五46,一起驱动小腿骨44、脚47之间绕y轴相对转动。
39.计算机48通过开关量控制系统49控制滑台气缸50松开与夹紧。滑台气缸50包括滑台气缸一28-1、滑台气缸二28-2。计算机48通过模拟量控制系统51控制气缸与气动马达52,
传感器检测到的气动元件的气压、角位移、线位移53反馈给计算机48实现闭环控制。气缸与气动马达52包括腰关节气缸一4、腰关节气缸二5、腰关节气缸三6、腰关节气缸四7、腰关节气缸五8、腰关节气缸六9、腰关节气缸七10、腰关节气缸八11、腰关节气缸九13、腰关节气缸十14、腰关节气缸十一15、腰关节气缸十二16、腰关节中间板17、腰关节气缸十三18、腰关节气缸十四19、腰关节气缸十五20、腰关节气缸十六21、气动马达一23、上肢气缸一26、上肢气缸二27、气动马达二35、下肢气缸一40、下肢气缸二41、下肢气缸三43、下肢气缸四45、下肢气缸五46。
40.本发明,通过控制各气缸与驱动马达,实现机器人关节位姿的控制,可以动态形象的模拟人关节的动作,并且可以实现精确的轨迹控制,本发明拥有其他机器人无法比拟的优势。
41.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。