1.本实用新型属于医疗器械领域,具体为一种具有实时监测报警功能的机器人通道建立系统。
背景技术:
2.在脊柱外科微创手术中,尤其是对经椎弓根进行手术操作时,由于患者的摆放体位、脊柱生理弧度和椎弓根本身的角度倾斜,手术入路存在一定的难度,导致经皮椎弓根穿刺手术难度比开放式手术的难度更大。传统脊椎手术中,需要外科医生手动地进行定位,并保持定位钻孔导引管的位置,但是存在以下缺点:
3.(1)对医生操作手术器械精度、灵巧度以及熟练度的要求较高容易导致手术定位过程复杂且安全性较低;
4.(2)医生需要不断在显示屏与病人之间切换,容易造成误伤,产生并发症;
5.(3)术中需透视的次数增多,导致对医务人员和患者的射线暴露量增加。
6.而现有的通过控制机械臂进行手术操作,虽然提高定位的精准度,但是在机器人操作过程中并没有反馈信号,并不知道在患者体内的实际操作是否存在偏差,对医护人员无法进行警示纠错。
技术实现要素:
7.为了解决上述技术问题,本实用新型提供了一种具有实时监测报警功能的机器人通道建立系统,不仅可以辅助医生在患者身体内进行定位并执行手术程序,而且可以实时监测手术过程中穿刺端在患者体内的情况,对通道的建立进行纠错警示。
8.实现上述技术目的,达到上述技术效果,本实用新型通过以下技术方案实现:
9.一种具有实时监测报警功能的机器人通道建立系统,包括
10.移动式x光射线诊断设备,用于采集术前透视图像传输至主控台;
11.示踪器,用于追踪手术目标;
12.光学跟踪系统,用于采集示踪器的位姿,并根据示踪器的位姿计算得到手术目标的空间位置信息;
13.主控台,用于结合手术目标的术前透视图像和空间位置信息规划手术路径,并根据规划路径控制机械臂自动定位,进行手术操作;
14.机械臂,其末端安装有通道建立装置,用于执行通道建立过程;
15.通道建立装置,所述通道建立装置上设有监测装置和报警装置,用于对通道建立过程进行情况反馈。
16.优选地,所述通道建立装置包括手柄部和开路器头体部,所述报警装置设置在手柄部,所述监测装置安装在所述开路器头体部的穿刺端,所述手柄部内还设有供电模块、计算处理模块和信号接收模块,所述供电模块分别与所述报警装置、监测装置、计算机处理模块和信号接收模块供电连接,所述计算处理模块通过信号接收模块与所述监测装置进行信
号传输连接,所述计算处理模块与所述报警装置控制连接。
17.优选地,所述手柄部为球形结构或者为t型结构。
18.优选地,所述开路器头体部的穿刺端的顶端为圆锥面结构,用于穿刺。
19.优选地,所述监测装置为压力传感器,所述压力传感器裸露安装在所述开路器头体部穿刺端外侧面,且靠近穿刺端圆锥面边缘,所述信号接收模块为压力信号接收模块。
20.优选地,所述监测装置为超声波探头,所述超声波探头裸露安装在所述开路器头体部穿刺端外侧面,所述信号接收模块为超声波接收模块。
21.优选地,所述报警装置包括警示灯和声音警示器中的一种或者两种。
22.有益效果:本实用新型提供了一种具有实时监测报警功能的机器人通道建立系统,具有如下优点:
23.1、通过精准定位可以使人和机械臂的操作精度最大化,减少病人的创伤,同时可以加快手术的流程,减少医生和病人所受的辐射。
24.2、通过监测组件实现对螺钉通道建立过程的实时监测,一旦通道建立有误,即可通过报警装置提醒医护人员进行调整,从而保证通道的正确建立,有效避免手术损伤,能够较好地保障临床手术时通道建立的安全性要求。
附图说明
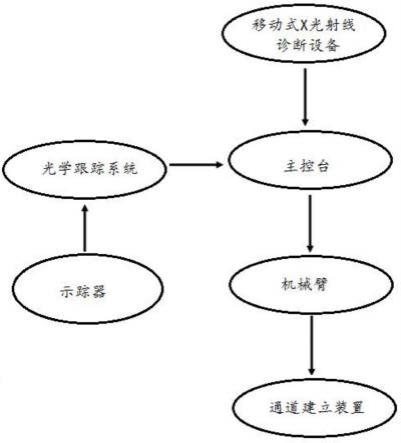
25.图1为本实用新型的整体结构图;
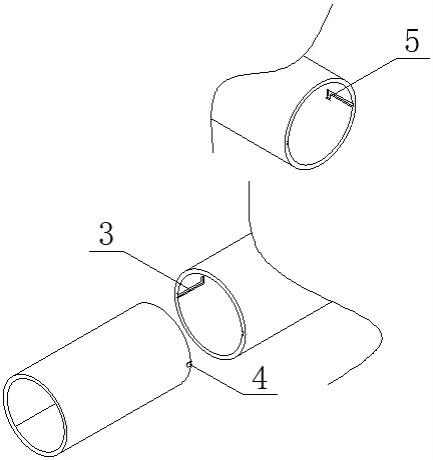
26.图2为实施例1 的通道建立装置的结构图;
27.图3为实施例1的穿刺端局部放大示意图;
28.图4为实施例2 的通道建立装置的结构图;
29.图5为实施例2的穿刺端局部放大示意图;
30.图中:通道建立装置1、手柄部1-1、开路器头体部1-2、压力传感器2-1、超声波探头2-2、报警装置3、警示灯3-1、声音警示器3-2。
具体实施方式
31.为了使本技术领域的人员更好地理解本技术中的技术方案,下面对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本技术保护的范围。
32.实施例1:
33.如图1-3所示,一种具有实时监测报警功能的机器人通道建立系统,包括
34.移动式x光射线诊断设备,用于采集术前透视图像传输至主控台;
35.示踪器,用于追踪手术目标;
36.光学跟踪系统,用于采集示踪器的位姿,并根据示踪器的位姿计算得到手术目标的空间位置信息;
37.主控台,用于结合手术目标的术前透视图像和空间位置信息规划手术路径,并根据规划路径控制机械臂自动定位,进行手术操作;
38.机械臂,其末端安装有通道建立装置,用于执行通道建立过程;
39.通道建立装置1,所述通道建立装置上设有监测装置和报警装置3,用于对通道建立过程进行情况反馈;
40.其中,所述通道建立装置1包括手柄部和开路器头体部,所述手柄部1-1为球形结构,所述开路器头体部1-2的穿刺端的顶端为圆锥面结构,用于穿刺,所述报警装置3设置在手柄部1-1,且所述报警装置包括警示灯1-11、声音警示器1-12,所述监测装置为压力传感器2-1,所述压力传感器2-1裸露安装在所述开路器头体部1-2穿刺端外侧面,且靠近穿刺端圆锥面边缘;本实用新型中压力传感器2-1可根据实际需求环绕穿刺端设置多个压力传感器,确保监测精确性。
41.所述手柄部1内还设有供电模块、计算处理模块和信号接收模块(压力信号接收模块),所述供电模块分别与所述报警装置6、监测装置、计算机处理模块和信号接收模块供电连接,所述计算处理模块通过信号接收模块与所述监测装置进行信号传输连接,所述计算处理模块与所述报警装置控制连接。
42.实施例1的工作原理如下:
43.步骤1:采用移动式x光射线诊断设备采集术前透视图像并传输至主控台;
44.步骤2:通过示踪器追踪手术目标,光学跟踪系统采集示踪器的位姿,并根据示踪器的位姿计算得到手术目标的空间位置信息,并将其反馈至主控台;
45.步骤3:主控台根据手术目标的术前透视图像和空间位置信息显示手术目标的空间位置,并由医生规划手术路径,随手根据规划路径控制机械臂自动定位,带动通道建立装置进行手术操作;
46.步骤4:在手术操作构成中,当正确操作时,穿刺端的压力传感器位于骨质内,并受到骨质的阻挡,压力传感器2-1将检测到的压力通过数据线传输至信号接收模块(压力信号接收模块),由压力信号接收模块将压力信号传输至计算处理模块进行数据处理,并将接收到的压力数据与预设的压力值进行比较,当压力值≥预设压力值,则表示螺钉通道建立正常;若压力值<预设压力值,则表示穿刺端突破骨质进入到周围软组织了,因此压力传感器2-1检测到的压力较小,此时,由计算处理模块控制手柄部的报警装置进行报警,警示医护人员螺钉通道的建立已偏离,以便医护人员及时进行调整,直至压力传感器检测到的压力值大于等于预设压力值,计算处理模块控制报警装置3停止工作,表明螺钉通道建立正常。
47.实施例2
48.如图4-5所示,实施例2中,所述监测装置为超声波探头2-2,所述超声波探头2-2裸露安装在所述开路器头体部穿刺端外侧面,且所述信号接收模块为超声波接收模块,所述手柄部1-1为t型结构,其余装置模块与实施例1的结构相同。
49.实施例2的具体工作步骤如下:
50.步骤1-步骤3与实施例1中的步骤1-步骤3相同,本实施例2的监测装置的工作原理为:通过超声波探头2-2检测周围生物组织,不同的生物组织反射的超声波信号的强度不同。如果计算处理模块接收到的超声波信号的强度>预设值,则表示通道发生偏离,计算处理模块控制所述报警装置报警,医护人员可以根据报警装置的报警及时做出方向调整,从而避免通道建立发生偏差。如果计算处理模块接收到的超声波信号的强度≤预设值,则表明操作正确,可继续进行手术过程。
51.本实用新型中采用的机械臂为多关节机械臂,可用于调整通道建立装置的手术操
作位姿。
52.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的两种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。