1.本发明涉及多移动机器人控制技术领域,尤其涉及一种基于等效输入扰动观测器的多移动机器人编队控制方法。
背景技术:
2.多移动机器人编队控制可以完成一些单一移动机器人无法完成的作业任务,因此,相比于单个机器人,多移动机器人系统具有诸多优势。但伴随着多移动机器人控制系统中机器人数量的增加,其控制的复杂度也相应的增加了。在多移动机器人系统中,机器人间通信时延问题以及其他一些不确定性因素的存在都对系统的有效控制带来了极大的挑战。
3.为了提高编队系统的控制精度,一种有效的解决方案是在控制系统中引入主动抗扰技术,即通过设计扰动观测器对系统的总和扰动进行快速有效的观测,并在系统控制律设计中加以补偿处理,进而抵消总和扰动对系统控制性能的影响。等效输入扰动技术,将作用于系统的总和扰动建模为仅作用于系统控制输入通道的等效输入扰动,然后通过设计扰动观测器对控制输入通道的等效输入扰动加以观测,即可快速抑制总和扰动的不利影响,提高编队系统的控制性能。
4.本发明采用zhijun li论文(vision-based model predictive control for steering of a nonholonomic mobile robot)中的移动机器人模型给出了一种基于等效输入扰动观测器的多移动机器人编队控制方法,该方法可实现对系统总和扰动的快速有效估计,及时消除编队系统中存在的多种不确定性因素的消极影响,提高多移动机器人编队系统的控制精度。
技术实现要素:
5.本发明目的就是为了实现对多移动机器人协同编队系统控制过程中存在的总和扰动的快速、准确估计,提高编队系统的控制精度以及鲁棒性能,提供一种基于等效输入扰动观测器的多移动机器人编队控制方法。
6.本发明是通过以下技术方案实现的:
7.一种基于等效输入扰动观测器的多移动机器人编队控制方法,具体步骤如下:
8.步骤1,建立考虑编队机器人间通信时延的多移动机器人控制系统数学模型以及编队控制问题描述;
9.1.1定义qi=[x
i y
i θi]
t
∈r3为第i个移动机器人的位姿向量,其中,xi,yi为移动机器人参考点的位置坐标,θi为移动机器人的方向角;ui=[v
i ωi]
t
∈r2为移动机器人的速度向量,具体由移动机器人的线速度和角速度构成;为移动机器人的正定惯性矩阵,其中,mi为移动机器人的质量,ii为移动机器人关于质心的转
动惯量;fi∈r2为地面摩擦力向量;τ
di
∈r2为移动机器人所受到的外部时变有界扰动;为移动机器人输入力矩变换阵,其中,ri为驱动轮半径,2bi为移动机器人驱动轮的间距;τi(t)=[τ
1i τ
2i
]
t
∈r2为移动机器人的输入力矩向量,其中,τ
1i
,τ
2i
为τi(t)的两个分量;di(t)为网络诱导时延。则轮式移动机器人i的运动学和动力学模型可描述为:
[0010][0011]
1.2将网络诱导时延di(t)建模为系统的扰动信号:
[0012]fi
=bi[τi(t-di(t))-τi(t)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0013]
由此,可以将系统的地面摩擦力、外部扰动以及网络诱导时延建模为系统的总和扰动,考虑网络诱导时延的移动机器人动力学模型可重写为
[0014][0015]
式中,为系统的总和扰动向量,δ
1i
,δ
2i
分别为总和扰动向量的分量一和分量二。
[0016]
1.3基于等效输入扰动技术,将作用于系统的总和扰动替换为作用于系统控制输入通道的等效输入扰动ωi,则系统态方程(3)可重写为
[0017][0018]
式中,为系统的等效输入扰动向量,其中,ω
1i
为等效输入扰动向量的第一个分量,ω
2i
为等效输入扰动向量的第二个分量,假设等效输入扰动各分量的一阶导数有界。
[0019]
1.4假设领航移动机器人产生的参考轨迹为:
[0020][0021]
式中,q0=[x
0 y
0 θ0]
t
∈r3为领航移动机器人的运动轨迹;v0为领航移动机器人的线速度;ω0为领航移动机器人的角速度。
[0022]
1.5定义期望的编队队形参数l
id
,θ
id
,其中,l
id
为期望的编队相对距离,θ
id
为期望的相对方向角。进而通过坐标变换可得跟随移动机器人i参考点的期望轨迹:
[0023][0024]
式中,[x
id y
id
]
t
∈r2,i=1,2,3,
…
,n,表示跟随移动机器人i的期望轨迹,领航机器人通过无线通信网络将该轨迹发送给与其编队的跟随移动机器人。
[0025]
1.6若选取跟随移动机器人本地坐标系x
bi
轴正向上的一点pi作为参考点,那么该点的坐标在全局坐标系xoy中可表示为:
[0026][0027]
式中,li表示参考点与跟随移动机器人本地坐标系坐标原点的间距。
[0028]
1.7定义编队控制误差向量:
[0029][0030]
对式(8)求时间导数,并结合式(6)、式(7)可得多移动机器人编队控制误差动态方程:
[0031][0032]
式中,其中,γ
1i
,γ
2i
分别为向量γi的两个分量;
[0033]
步骤2,由编队控制误差动态方程设计多移动机器人编队速度控制律;
[0034]
2.1由式(9),u
vi
,u
ωi
可设计为
[0035][0036]
式中,β
1i
>0,β
2i
>0为编队速度控制律设计参数。
[0037]
2.2设计李雅普诺夫函数:
[0038][0039][0040]
2.3对式(11)、式(12)求导可得:
[0041]
[0042][0043]
2.4结合式(9),可得编队速度控制律为:
[0044][0045]
步骤3,基于等效输入扰动观测器的编队移动机器人力矩控制律设计;
[0046]
3.1由式(4),系统的等效输入扰动观测器可设计为
[0047][0048]
式中,为状态观测误差向量,其中,e
11i
,e
12i
为状态观测误差向量的两个分量;k
1i
>0,k
2i
>0为等效输入扰动观测器的设计参数;
[0049]
sig
α
(e
1i
)=[|e
11i
|
α
sign(e
11i
)|e
12i
|
α
sign(e
12i
)]
t
,0<α<1。
[0050]
3.2状态观测误差的动态方程为
[0051][0052]
若记上式可表示为
[0053][0054]
式中,其中,δ
1i
,δ
2i
分别为向量δi的分量一和分量二。
[0055]
由的有界性可知,δi也是有界的,即存在大于零的未知常数ρ
1i
,ρ
2i
使得关系|δ
1i
|≤ρ
1i
,|δ
2i
|≤ρ
2i
成立。
[0056]
3.3为方便分析,式(18)的分量形式可以表示为
[0057][0058]
3.4下面以式(19)的前两个方程为例来分析所设计的等效输入扰动观测器的稳定性。
[0059]
设计李雅普诺夫函数:
[0060][0061]
记x=[|e
11i
|
α
sign(e
11i
) e
21i
]
t
,则可得:
[0062]v3i
=x
t
px
ꢀꢀꢀꢀꢀꢀ
(21)
[0063]
式中,p为对称正定阵。
[0064]
3.5对式(20)求导可得:
[0065][0066]
式中,c1=[0 2],c2=[-2k
1i 0]。
[0067]
3.6令当满足k
1i
>k
2i
时q>0,则上式可写为
[0068][0069]
式中,λ
min
{q}为矩阵q的最小特征值。
[0070]
3.7由式(23)可知当时式(23)是渐近收敛的。因此,通过选择合适的观测器设计参数即可使等效输入扰动观测器的状态观测误差收敛到原点附近一个极小的领域内。
[0071]
3.8所以,由以上分析可得等效输入扰动ωi的估计值为:
[0072][0073]
3.9编队移动机器人力矩控制律设计。
[0074]
首先,定义速度跟踪误差向量:
[0075][0076]
3.10对式(25)求时间导数可得:
[0077][0078]
式中,
[0079]
3.11设计滑模变量si=ei γi∫eidt,其中γi>0为滑模变量设计参数。
[0080]
3.12由滑模变量,跟随移动机器人i的力矩控制律可设计为
[0081][0082]
式中,为移动机器人力矩控制律增益参数;为等效输入扰动ωi的估计值。
[0083]
步骤4,基于等效输入干扰观测器的多移动机器人编队控制系统稳定性分析;
[0084]
4.1设计李雅普诺夫函数:
[0085][0086]
4.2对式(28)求时间的导数并将式(13)、式(14)以及式(27)代入可得:
[0087][0088][0089]
式中,k
3min
=min{k
31i
,k
32i
},ξ=min{2k
3min-1,2β
1i
,2β
2i
}。
[0090]
4.3进一步,由式(29)可得如下不等式:
[0091][0092]
4.4由v的定义及式(30)可知,e
xi
,e
yi
,ei渐近稳定。
[0093]
本发明的优点是:本发明将系统所受到的多种不确定因素建模为作用于控制输入通道的等效输入扰动,这可以全面考虑到系统所受到的多种不确定因素对系统控制性能的影响,并可简化系统对不确定因素的建模过程,可以提高扰动估计的准确性以及快速性,实现对编队的可靠稳定控制。
附图说明
[0094]
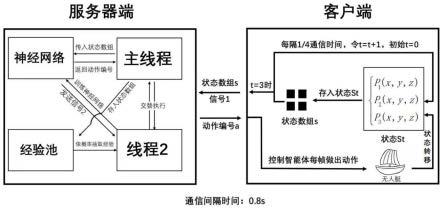
图1是所述控制系统原理框图;
[0095]
图2a是所述等效输入扰动观测器对跟随移动机器人1的等效输入扰动向量分量一的观测误差;
[0096]
图2b是所述等效输入扰动观测器对跟随移动机器人1的等效输入扰动向量分量二的观测误差;
[0097]
图3是所述控制方法编队误差示意图;
[0098]
图4是领航移动机器人与跟随移动机器人1的编队轨迹示意图;
[0099]
图5是本发明所述多移动机器人编队结构示意图。
具体实施方式
[0100]
以下结合附图对本发明的实施做进一步的描述。
[0101]
参照图1
‑‑
图5,一种基于等效输入扰动观测器的多移动机器人编队控制方法,具体技术步骤如下:
[0102]
步骤1,建立考虑编队机器人间通信时延的多移动机器人控制系统数学模型以及编队控制问题描述。
[0103]
1.1定义qi=[x
i y
i θi]
t
∈r3为第i个移动机器人的位姿向量,其中,xi,yi为移动机器人参考点的位置坐标,θi为移动机器人的方向角;ui=[v
i ωi]
t
∈r2为移动机器人的速度向量,具体由移动机器人的线速度和角速度构成;为移动机器人的正定惯性矩阵,其中,mi为移动机器人的质量,ii为移动机器人关于质心的转动惯量;fi∈r2为地面摩擦力向量;τ
di
∈r2为移动机器人所受到的外部时变有界扰动;为移动机器人输入力矩变换阵,其中,ri为驱动轮半径,2bi为移动机器人驱动轮的间距;τi(t)=[τ
1i τ
2i
]
t
∈r2为移动机器人的输入力矩向量,其中,τ
1i
,τ
2i
为τi(t)的两个分量;di(t)为网络诱导时延。则轮式移动机器人i的运动学和动力学模型可描述为:
[0104][0105]
1.2将网络诱导时延di(t)建模为系统的扰动信号:
[0106]fi
=bi[τi(t-di(t))-τi(t)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0107]
由此,可以将系统的地面摩擦力、外部扰动以及网络诱导时延建模为系统的总和扰动,考虑网络诱导时延的移动机器人动力学模型可重写为
[0108]
[0109]
式中,为系统的总和扰动向量,δ
1i
,δ
2i
分别为总和扰动向量的分量一和分量二。
[0110]
1.3基于等效输入扰动技术,将作用于系统的总和扰动替换为作用于系统控制输入通道的等效输入扰动ωi,则系统态方程(3)可重写为
[0111][0112]
式中,为系统的等效输入扰动向量,其中,ω
1i
为等效输入扰动向量的第一个分量,ω
2i
为等效输入扰动向量的第二个分量,假设等效输入扰动各分量的一阶导数有界。
[0113]
1.4假设领航移动机器人产生的参考轨迹为:
[0114][0115]
式中,q0=[x
0 y
0 θ0]
t
∈r3为领航移动机器人的运动轨迹;v0为领航移动机器人的线速度;ω0为领航移动机器人的角速度。
[0116]
1.5定义期望的编队队形参数l
id
,θ
id
,其中,l
id
为期望的编队相对距离,θ
id
为期望的相对方向角。进而通过坐标变换可得跟随移动机器人i参考点的期望轨迹:
[0117][0118]
式中,[x
id y
id
]
t
∈r2,i=1,2,3,
…
,n,表示跟随移动机器人i的期望轨迹,领航机器人通过无线通信网络将该轨迹发送给与其编队的跟随移动机器人。
[0119]
1.6若选取跟随移动机器人本地坐标系x
bi
轴正向上的一点pi作为参考点,那么该点的坐标在全局坐标系xoy中可表示为:
[0120][0121]
式中,li表示参考点与跟随移动机器人本地坐标系坐标原点的间距。
[0122]
1.7定义编队控制误差向量:
[0123][0124]
对式(8)求时间导数,并结合式(6)、式(7)可得多移动机器人编队控制误差动态方程:
[0125]
[0126]
式中,其中,γ
1i
,γ
2i
分别为向量γi的两个分量;
[0127]
步骤2,由编队控制误差动态方程设计多移动机器人编队速度控制律。
[0128]
2.1由式(9),u
vi
,u
ωi
可设计为
[0129][0130]
式中,β
1i
>0,β
2i
>0为编队速度控制律设计参数。
[0131]
2.2设计李雅普诺夫函数:
[0132][0133][0134]
2.3对式(11)、式(12)求导可得:
[0135][0136][0137]
2.4结合式(9),可得编队速度控制律为:
[0138][0139]
步骤3,基于等效输入扰动观测器的编队移动机器人力矩控制律设计。
[0140]
3.1由式(4),系统的等效输入扰动观测器可设计为
[0141][0142]
式中,为状态观测误差向量,其中,e
11i
,e
12i
为状态观测误差向量的两个分量;k
1i
>0,k
2i
>0为等效输入扰动观测器的设计参数;
[0143]
sig
α
(e
1i
)=[|e
11i
|
α
sign(e
11i
) |e
12i
|
α
sign(e
12i
)]
t
,0<α<1。
[0144]
3.2状态观测误差的动态方程为
[0145][0146]
若记上式可表示为
[0147][0148]
式中,其中,δ
1i
,δ
2i
分别为向量δi的分量一和分量二。
[0149]
由的有界性可知,δi也是有界的,即存在大于零的未知常数ρ
1i
,ρ
2i
使得关系|δ
1i
|≤ρ
1i
,|δ
2i
|≤ρ
2i
成立。
[0150]
3.3为方便分析,式(18)的分量形式可以表示为
[0151][0152]
3.4下面以式(19)的前两个方程为例来分析所设计的等效输入扰动观测器的稳定性。
[0153]
设计李雅普诺夫函数:
[0154][0155]
记x=[|e
11i
|
α
sign(e
11i
) e
21i
]
t
,则可得:
[0156]v3i
=x
t
px
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0157]
式中,p为对称正定阵。
[0158]
3.5对式(20)求导可得:
[0159][0160]
式中,c1=[0 2],c2=[-2k
1i 0]。
[0161]
3.6令当满足k
1i
>k
2i
时q>0,则上式可写为
[0162][0163]
式中,λ
min
{q}为矩阵q的最小特征值。
[0164]
3.7由式(23)可知当时式(23)是渐近收敛的。因此,通过选择合适的观测器设计参数即可使等效输入扰动观测器的状态观测误差收敛到原点附近一个极小的领域内。
[0165]
3.8所以,由以上分析可得等效输入扰动ωi的估计值为:
[0166][0167]
3.9编队移动机器人力矩控制律设计。
[0168]
首先,定义速度跟踪误差向量:
[0169][0170]
3.10对式(25)求时间导数可得:
[0171][0172]
式中,
[0173]
3.11设计滑模变量si=ei γi∫eidt,其中γi>0为滑模变量设计参数。
[0174]
3.12由滑模变量,跟随移动机器人i的力矩控制律可设计为
[0175][0176]
式中,为移动机器人力矩控制律增益参数;为等效输入扰动ωi的估计值。
[0177]
步骤4,基于等效输入干扰观测器的多移动机器人编队控制系统稳定性分析。
[0178]
4.1设计李雅普诺夫函数:
[0179][0180]
4.2对式(28)求时间的导数并将式(13)、式(14)以及式(27)代入可得:
[0181][0182][0183]
式中,k
3min
=min{k
31i
,k
32i
},ξ=min{2k
3min-1,2β
1i
,2β
2i
}。
[0184]
4.3进一步,由式(29)可得如下不等式:
[0185][0186]
4.4由v的定义及式(30)可知,e
xi
,e
yi
,ei渐近稳定。
[0187]
为更好地说明本发明所述控制方法的有效性,本发明通过matlab仿真软件对所述控制方法进行了仿真研究。仿真研究中有二个移动机器人:领航移动机器人,跟随移动机器人1。
[0188]
领航移动机器人的线速度v0设置为v0=0.5m/s,角速度ω0设置为初始位姿坐标设置为q0=[0,0,0]
t
。跟随移动机器人1的物理参数设置为m1=9.4kg,i1=2.91kg
·
m2,r1=0.25m,b1=0.4m,l1=1.6m,初始位姿坐标设置为[-20.1π/9]
t
。期望的编队相对距离设置为l
id
=1.5m,期望的相对方向角设置为
[0189]
跟随移动机器人控制器参数设置为:β
11
=16,β
21
=18,α=0.6,k
11
=7,k
21
=0.04,k
311
=k
321
=6.3,γ1=0.1。
[0190]
假设跟随移动机器人所受到的地面摩擦力动态矢量为f1=[0.4*sin(t) 3.6,cos(t) 3.1]
t
,所受到的外部时变有界扰动τ
d1
=[0.2sin(t) 0.9,0.3cos(t) 0.8]
t
,两控制输入通道的网路诱导时延均假设为10毫秒。
[0191]
所述控制方法的仿真实验结果如图2-图4所示,图2a和图2b为本发明所述等效输入扰动观测器对跟随移动机器人1的等效输入扰动向量的观测情况。图3为本发明所述控制方法编队控制误差示意图。图4为领航移动机器人与跟随移动机器人1的编队轨迹示意图。从图2可见,所述观测器具有响应速度快,观测精度高等特点,即使在编队期望轨迹发生瞬
间切换的情况下,所述观测器也能做到观测误差的快速收敛性能。从图3,图4可见,所述控制方法在编队系统存在网络诱导时延、地面摩擦力动态以及外部扰动的情况下也能实现良好的编队控制性能。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。