1.本发明涉及一种无人机,具体是一种基于物联网的可实时定位的物流配送无人机。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.随着物联网技术的快速发展,无人机也被应用于物流配送,无人机配送即节约了人力,缓解了物流压力,又能避免人员接触,减少病毒的传播,然而传统的无人机在携带物件之后其重心可能会不在无人机的中线上,导致其飞行方位难以控制,同时在无人机上设置如果仅使用夹持机构来对物件进行夹持,可能随着无人机飞行的过程中的抖动将物件抖落,为解决上述问题,现提供一种基于物联网的可实时定位的物流配送无人机。
技术实现要素:
4.本发明的目的在于提供一种基于物联网的可实时定位的物流配送无人机,通过将待配送的物件放置在放置板上,收缩第二电动伸缩杆控制放置板上升,使得夹板分布于物件的四周,当放置板下方的距离传感器感应的距离存在差异时,说明物件的重心偏移无人机本体的中线,启动数值较小的距离传感器所对应的第一电动伸缩杆,对物件的放置位置进行调节,使其重心位于无人机本体上,通过将物件的重心调节至无人机本体的中线,可以尽可能的保证无人机在飞行时不发生歪斜,便于控制其飞行方位。
5.本发明的目的可以通过以下技术方案实现:
6.一种基于物联网的可实时定位的物流配送无人机,无人机包括底座,所述底座的上方固定有无人机本体,底座的下方设有两个相对分布的固定臂和两个相对分布的转动臂,转动臂和固定臂交错分布于同一个圆周上,转动臂和固定臂上均固定有伸缩件,无人机还包括可拆卸的支撑件。
7.所述支撑件包括底板,底板的上方设有放置板,放置板与底板之间连接有多个弹簧,所有的弹簧分布于同一个圆周上,该圆周的圆心位于放置板的中线上,放置板的底部固定有多个距离传感器,距离传感器用于感应其与底板之间的距离,所有的距离传感器分布于同一个圆周上,该圆周的圆心位于放置板的中线上。
8.进一步的,所述固定臂包括固定在底座下方的第一矩形框架,第一矩形框架与底座垂直。
9.进一步的,所述第一矩形框架的外侧固定有u形滑槽,u形滑槽的开口向下,u形滑槽的侧壁下方固定有支撑条,支撑条的一端短于u形滑槽,u形滑槽的顶板上设有直线滑轨,直线滑轨内滑动设有电动滑块,电动滑块的下方设有卡合块。
10.进一步的,所述第一矩形框架上滑动设有水平的第一u形滑杆,第一u形滑杆与第一矩形框架之间连接有第一气囊,第一气囊位于第一u形滑杆的外侧,第一u形滑杆与第一
矩形框架之间连接有弹性绳。
11.进一步的,所述电动滑块的上方贯穿u形滑槽固定有连接条,连接条上固定有第一连接块,第一矩形框架上固定有水平的气筒,气筒的推杆固定在第一连接块上,第一气囊与气筒之间连通设有第一软管。
12.进一步的,所述转动臂包括位于底座下方转动的第二矩形框架,底座上固定有用于驱动第二矩形框架转动的电机。
13.进一步的,所述第二矩形框架的外侧固定有两个轴套,转动臂还包括与第二矩形框架平行的第二u形滑杆,第二u形滑杆的两侧侧杆分别套装在两个轴套内,第二u形滑杆与轴套之间连接有第二气囊,第二气囊位于轴套靠近底座一侧,第二气囊与第一气囊之间连通设有第二软管。
14.进一步的,所述伸缩件包括第一电动伸缩杆,固定臂和转动臂上的第一电动伸缩杆分别固定在第一矩形框架和第二矩形框架的内侧,第一电动伸缩杆的输出轴上固定有夹板,夹板远离第一电动伸缩杆的一侧固定有缓冲垫。
15.进一步的,所述底板的两侧均固定有第二连接块,第二连接块的上方固定有第二电动伸缩杆,第二电动伸缩杆的输出轴上固定有滑动块,滑动块的上方开设有插槽,通过将卡合块卡入插槽内,通过将滑动块滑入u形滑槽与支撑条之间实现对支撑件的安装。
16.本发明的有益效果:
17.1、通过将待配送的物件放置在放置板上,收缩第二电动伸缩杆控制放置板上升,使得夹板分布于物件的四周,当放置板下方的距离传感器感应的距离存在差异时,说明物件的重心偏移无人机本体的中线,启动数值较小的距离传感器所对应的第一电动伸缩杆,对物件的放置位置进行调节,使其重心位于无人机本体上,通过将物件的重心调节至无人机本体的中线,可以尽可能的保证无人机在飞行时不发生歪斜,便于控制其飞行方位。
18.2、在需要将无人机所运载的物件放置在无人机能够进入的地点时,可以先启动电动滑块将支撑件从无人机上摘除,当飞行到放置位置后,缓慢降落,然后收缩第一电动伸缩杆对物件进行释放,实现了自动化下料。
19.3、当需要将无人机所运载的物件放置在无人机无法进入的地点时,比如放置柜或放置架,可以将靠近放置柜或放置架一侧的第二矩形框架向上反转,通过另一个第二矩形框架上的伸缩件将支撑件上的物件推入放置柜或放置架上,因此该无人机还能够将其运载的物件自动化的放置在放置柜或放置架上。
20.4、通过在底板和放置板之间设置弹簧也可以在无人机下落的地面时对物件进行缓冲,降低地面对物件的冲击,避免物件损坏,将放置板支撑在物件的下方,也能够避免在无人机飞行的过程中晃动幅度较大导致的物件掉落问题。
21.5、无人机在正常飞行的过程中,第一气囊和第二气囊内均无气体充入,当无人机本体出现故障时,启动电动滑块控制支撑件从无人机上脱离,能够降低无人机的重力,进而降低其坠落速度,同时在电动滑块滑动的过程中,能够对第一气囊和第二气囊进行充气,第一气囊和第二气囊撑起之后能够在下落的过程中增加与空气之间的阻力,降低坠落速度。
22.6、在支撑件脱离无人机后,还可以将转动臂向上转动,使得转动臂上的伸缩件向下,使得第二气囊与第一气囊平行,能够保证无人机的在无风的状态下受力平衡,使其尽可能的平稳坠落,当伸缩件向下时,可以伸长对应的第一电动伸缩杆,使得缓冲垫位于物件的
下方,可以在坠落到地面时对物件进行一定的缓冲,降低其损坏的概率。
23.7、当无人机坠落至水中时,由于第二气囊和第一气囊均属于充气状态,因此该无人机会飘浮的水面,便于人员进行找寻,同时如果坠落时无人机本体位于底座的上方,还能够避免无人机本体进入水中,以免其内的电路系统受损,便于后续对其进行维修,同时可也能避免其上的定位器损坏,方便人员搜寻时对其进行定位。
附图说明
24.下面结合附图对本发明作进一步的说明。
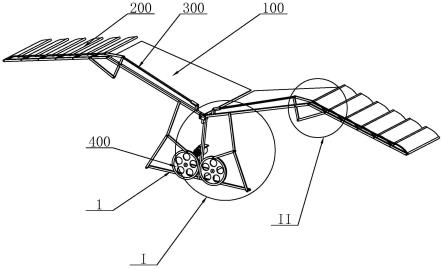
25.图1是本发明无人机结构示意图;
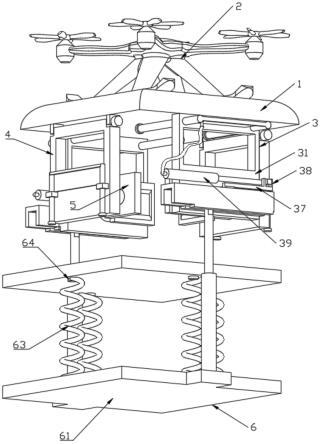
26.图2是本发明无人机部分结构剖面示意图;
27.图3是图2中a处放大结构示意图;
28.图4是本发明支撑件结构示意图。
29.图中:1、底座;2、无人机本体;3、固定臂;4、转动臂;5、伸缩件;6、支撑件;31、第一矩形框架;32、u形滑槽;33、支撑条;34、直线滑轨;35、电动滑块;36、卡合块;37、连接条;38、第一连接块;39、气筒;310、第一u形滑杆;311、第一气囊;312、第一软管;313、弹性绳;41、第二矩形框架;42、电机;43、轴套;44、第二u形滑杆;45、第二气囊;46、第二软管;51、第一电动伸缩杆;52、夹板;53、缓冲垫;61、底板;62、放置板;63、弹簧;64、距离传感器;65、第二连接块;66、第二电动伸缩杆;67、滑动块;68、插槽。
具体实施方式
30.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
31.在本发明的描述中,需要理解的是,术语“开孔”、“上”、“下”、“厚度”、“顶”、“中”、“长度”、“内”、“四周”等指示方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的组件或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。
32.一种基于物联网的可实时定位的物流配送无人机,无人机包括底座1,如图1所示,底座1的上方固定有无人机本体2,底座1的下方设有两个相对分布的固定臂3和两个相对分布的转动臂4,转动臂4和固定臂3交错分布于同一个圆周上,转动臂4和固定臂3上均固定有伸缩件5,无人机还包括可拆卸的支撑件6,无人机本体2上安装有定位器。
33.固定臂3包括固定在底座1下方的第一矩形框架31,如图2、图3所示,第一矩形框架31靠近无人机本体2中线的一侧为内侧,远离无人机本体2中线的一侧为外侧,第一矩形框架31与底座1垂直,第一矩形框架31的外侧固定有u形滑槽32,u形滑槽32的开口向下,u形滑槽32的侧壁下方固定有支撑条33,支撑条33的一端短于u形滑槽32。
34.u形滑槽32的顶板上设有直线滑轨34,直线滑轨34内滑动设有电动滑块35,电动滑块35的下方设有卡合块36,电动滑块35的上方贯穿u形滑槽32固定有连接条37,连接条37上固定有第一连接块38,第一矩形框架31上固定有水平的气筒39,气筒39的推杆固定在第一
连接块38上,第一矩形框架31上滑动设有水平的第一u形滑杆310,第一u形滑杆310与第一矩形框架31之间连接有第一气囊311,第一气囊311与气筒39之间连通设有第一软管312,第一气囊311位于第一u形滑杆310的外侧,第一u形滑杆310与第一矩形框架31之间连接有弹性绳313,在弹性绳313的作用下,第一u形滑杆310伸出第一矩形框架31较短。
35.转动臂4包括位于底座1下方转动的第二矩形框架41,第二矩形框架41靠近无人机本体2中线的一侧为内侧,远离无人机本体2中线的一侧为外侧,底座1上固定有用于驱动第二矩形框架41转动的电机42,第二矩形框架41的外侧固定有两个轴套43,转动臂4还包括与第二矩形框架41平行的第二u形滑杆44,第二u形滑杆44的两侧侧杆分别套装在两个轴套43内,第二u形滑杆44与轴套43之间连接有第二气囊45,第二气囊45位于轴套43靠近底座1一侧,第二气囊45与第一气囊311之间连通设有第二软管46。
36.伸缩件5包括第一电动伸缩杆51,固定臂3和转动臂4上的第一电动伸缩杆51分别固定在第一矩形框架31和第二矩形框架41的内侧,第一电动伸缩杆51的输出轴上固定有夹板52,夹板52远离第一电动伸缩杆51的一侧固定有缓冲垫53。
37.支撑件6包括底板61,如图4所示,底板61的上方设有放置板62,放置板62与底板61之间连接有多个弹簧63,所有的弹簧63分布于同一个圆周上,该圆周的圆心位于放置板62的中线上,放置板62的底部固定有多个距离传感器64,距离传感器64用于感应其与底板61之间的距离,所有的距离传感器64分布于同一个圆周上,该圆周的圆心位于放置板62的中线上。
38.底板61的两侧均固定有第二连接块65,第二连接块65的上方固定有第二电动伸缩杆66,第二电动伸缩杆66的输出轴上固定有滑动块67,滑动块67的上方开设有插槽68,通过将卡合块36卡入插槽68内,通过将滑动块67滑入u形滑槽32与支撑条33之间实现对支撑件6的安装,安装完成后,放置板62的中心与无人机本体2的中线上。
39.使用时,通过将待配送的物件放置在放置板62上,收缩第二电动伸缩杆66控制放置板62上升,使得夹板52分布于物件的四周,当放置板62下方的众多距离传感器64感应的距离存在差异,且最大距离和最小距离之间的差异大于预设的差异值,则说明物件的重心偏移无人机本体2的中线,启动数值较小的距离传感器64所对应的第一电动伸缩杆51,将物件向数值较大的一侧进行推动,直至数值相同或者数值差异在预设的范围内。
40.当所有的距离传感器64感应的距离均相同或在预设的范围内时,说明放置板62与底板61平行,表明物件的重心与放置板62的中心位于同一竖直线上,此时可以启动第一电动伸缩杆51对物件进行夹持,且夹持的过程中需保证物件的位置不再发生改变,通过将物件的重心调节至无人机本体2的中线,可以尽可能的保证无人机在飞行时不发生歪斜,便于控制其飞行方位。
41.在需要将无人机所运载的物件放置在无人机能够进入的地点时,可以先启动电动滑块35向支撑条33较短的一端滑动,同时带动支撑件6滑动,当滑动块67与支撑条33脱离后,支撑件6与u形滑槽32脱离,此时无人机可以脱离支撑件6进行飞行,当飞行到放置位置后,缓慢降落,然后收缩第一电动伸缩杆51对物件进行释放,实现了自动化下料。
42.当需要将无人机所运载的物件放置在无人机无法进入的地点时,比如放置柜或放置架,可以将靠近放置柜或放置架一侧的第二矩形框架41向上反转,通过另一个第二矩形框架41上的伸缩件5将支撑件6上的物件推入放置柜或放置架上,因此该无人机还能够将其
运载的物件自动化的放置在放置柜或放置架上。
43.通过在底板61和放置板62之间设置弹簧63也可以在无人机下落的地面时对物件进行缓冲,降低地面对物件的冲击,避免物件损坏,将放置板62支撑在物件的下方,也能够避免在无人机飞行的过程中晃动幅度较大导致的物件掉落问题。
44.无人机在正常飞行的过程中,第一气囊311和第二气囊45内均无气体充入,当无人机本体2出现故障时,启动电动滑块35控制支撑件6从无人机上脱离,能够降低无人机的重力,进而降低其坠落速度,同时在电动滑块35滑动的过程中,推动气筒39的推杆,对第一气囊311和第二气囊45进行充气,随着第一气囊311的充气,第一u形滑杆310向远离无人机本体2的中线方向移动,同时第二u形滑杆44向靠近底座1一侧移动,第一气囊311和第二气囊45撑起之后能够在下落的过程中增加与空气之间的阻力,降低坠落速度。
45.在支撑件6脱离u形滑槽32后,还可以将转动臂4向上转动,使得转动臂4上的伸缩件5向下,使得第二气囊45与第一气囊311平行,能够保证无人机的在无风的状态下受力平衡,使其尽可能的平稳坠落,当伸缩件5向下时,可以伸长对应的第一电动伸缩杆51,使得缓冲垫53位于物件的下方,可以在坠落到地面时对物件进行一定的缓冲,降低其损坏的概率。
46.当无人机坠落至水中时,由于第二气囊45和第一气囊311均属于充气状态,因此该无人机会飘浮的水面,便于人员进行找寻,同时如果坠落时无人机本体2位于底座1的上方,还能够避免无人机本体2进入水中,以免其内的电路系统受损,便于后续对其进行维修,同时可也能避免其上的定位器损坏,方便人员搜寻时对其进行定位。
47.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
48.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。