1.本发明涉及无人机技术领域,尤其涉及一种垂直起降无人机及其系统。
背景技术:
2.现阶段无人机技术已经发展至一定水平,各领域的应用已经相对成熟。其中无人机在农业领域的应用主要是进行植保喷药等,林业领域主要利用无人机进行森林防火的观测以及森林喷药,而无人机飞行过程中故障,则会导致无人机从高空坠落,严重时致使无人机坠毁。申请号为cn202210279441.4的中国专利提供一种具备螺旋桨防护机构的可折叠式无人机,通过在螺旋桨周围设置弹性绑带以及防护气囊,对无人机可能发生的碰撞进行防护。
3.但是,本技术人发现现有技术至少存在以为问题:
4.无人机在森林上空执行任务,遇到故障后坠落时,森林中茂密的植被会穿过弹性绑带与无人机机体发生碰撞,同时将无人机叉在树木顶部,不方便操作人员进行回收。
技术实现要素:
5.有鉴于此,本发明的目的在于提出一种垂直起降无人机及其系统,以解决无人机故障后坠落森林中时,不方便操作人员进行回收的问题。
6.基于上述目的,本发明提供了一种垂直起降无人机,包括机体,机体内安装有控制模块,控制模块电性连接有遥控端,机体上安装有多组螺旋支架,螺旋支架上分别安装有螺旋桨,机体侧面还安装有至少两组平衡翼,所述平衡翼端部安装有连接轴,连接轴可旋转连接有第一防护环,所述第一防护环上固定安装有两组安装筒,两组安装筒设置于第一防护环的同一条直径上,所述安装筒固定连接有两组第二防护环,第二防护环两侧分别安装有移动防护环,移动防护环与第二防护环之间连接有收缩布,移动防护环两端连接有扭力轴,安装筒中设有安装腔,扭力轴端部与安装腔的内壁可旋转连接,扭力轴上套设有扭力弹簧,扭力弹簧使得移动防护环具有向着第一防护环旋转的趋势,扭力轴上连接有安装柱,安装柱侧面安装有限位销,安装腔中还设有卡板,卡板两端分别一体成型有限位板,卡板至少具有一个锁紧位置和一个避让位置,卡板处于锁紧位置时,限位板对限位销进行限位,卡板处于避让位置时,限位板解除对限位销的限位,移动防护环向着第一防护环的运动趋势不受抑制。
7.使用时,螺旋桨为无人机提供飞行动力,平衡翼对无人机的飞行姿态进行微调,并为无人机飞行提供助力,正常飞行状态下,卡板处于锁紧位置时,限位板对限位销进行限位,抑制移动防护环向着第一防护环的运动趋势,第一防护环配合第二防护环对无人机机身进行防护,防止无人机机身直接与物体发生碰撞,当无人机处于异常飞行状态,则无人机控制模块发送信号至卡板,卡板移动至避让位置,限位板解除对限位销的限位,在扭力弹簧的弹力作用下,扭力轴旋转使得移动防护环向着第一防护环旋转,旋转的同时,收缩布被拉开,使得机体完全被收缩布包裹住,由于收缩布的整体打开,提升了无人机坠落的风阻,降
低无人机的坠落速度,减轻碰撞,当无人机掉落至树木上时,第一防护环、第二防护环、移动防护环以及收缩布构成球状,不易被挂在树木上,方便操作人员进行无人机回收。
8.可选的,所述移动防护环与第二防护环之间还安装有多组支撑肋条,多组支撑肋条两端可旋转安装于安装筒中,支撑肋条与收缩布固定连接。
9.可选的,所述卡板固定连接有电动伸缩杆,电动伸缩杆固定安装于安装腔的内壁上,电动伸缩杆与控制模块电性连接,控制模块检测到无人机飞行异常则控制电动伸缩杆缩短,使得卡板从锁紧位置移动至避让位置。
10.可选的,所述卡板与安装腔的内壁之间固定连接有电动伸缩杆,电动伸缩杆使得卡板具有从锁紧位置移动至避让位置的趋势。
11.可选的,所述安装筒中还设有弹射腔,弹射腔中安装有弹射筒,弹射筒开口朝向远离机体的一侧,所述弹射筒内部安装有弹射弹簧,所述弹射弹簧连接有推板,推板抵触连接有重力球,弹射弹簧被压缩,推板具有将重力球弹出的趋势,所述重力球连接有拉线,弹射筒侧壁上开设有通孔,拉线自通孔延伸至弹射腔中,所述弹射腔中安装有可旋转的收线辊,拉线绕卷于收线辊上,收线辊连接有限位单元,拉线端部固定连接有拉力计,所述安装柱端部安装有按压开关,移动防护环自第二防护环向第一防护环旋转过程中,两组相对的按压开关相互挤压触发,按压开关与限位单元电性连接,控制模块实时记录无人机飞行高度,并根据飞行高度计算无人机坠落时间t,限位单元电性连接有延时单元,延时单元设定有延时时间t,则t=t t
设
,其中t
设
为设定值,排除无人机下坠过程中碰撞时间的影响,按压开关触发后,延时单元启动计时,在延时时间t后,限位单元解除对收线辊的限位,拉力计检测拉线拉力大小并判断无人机的位置状态。
12.当无人机飞行状态异常,第二防护环两侧的移动防护环自第二防护环向第一防护环旋转,同时扭力轴旋转,带动按压开关旋转,两组按压开关旋转接触,延时单元开始计时,当计时至延时时间t时,则限位单元解除对收线辊的限位,在弹射弹簧的弹力作用下,推板将重力球自弹射筒中弹出,此时,两组安装筒中的重力球都被弹出,两组拉力计分别检测其连接的拉线的拉力数据,并根据拉力数据判断无人机的位置状态,能够判断无人机被挂在树木上还是已经坠落地面,对于茂密的丛林环境,能够帮助工作人员缩小搜索范围,只在地面寻找或者树梢寻找,提升找回速度。
13.可选的,两组所述拉力计分别检测其连接的拉线的拉力数据f1、f2,拉力计电性连接有比较单元,比较单元中设有标准重力m,标准重力m为重力球的重力,若f1≥m与f2≥m成立至少一项,则判定无人机悬空,进一步判定f1≥m与f2≥m是否仅成立其中一项,若是,且判定悬空高度低于拉线长度,否则不判定无人机悬空高度,若f1≥m或f2≥m都不成立,则判定无人机坠地,判断单元将判断结果发送至控制模块,控制模块将无人机gps定位以及判断结果发送至遥控端。
14.可选的,所述限位单元包括安装于收线辊两端的安装轴,所述弹射腔内部安装有安装座,安装轴安装于安装座上,安装轴一端端部连接有限位座,所述限位座端面上开设有限位孔,弹射腔内壁上安装有伸缩限位杆,所述伸缩限位杆端部设有与限位孔相适配的限位柱,限位柱插入限位孔中限制收线辊旋转。
15.可选的,所述安装轴远离限位座的端部延伸至弹射腔外部,安装轴位于弹射腔外部的端部固定连接有手柄。
16.一种垂直起降无人机系统,包括:
17.飞行动力模块,用于提供飞行动力;
18.控制模块,用于控制无人机的整体飞行,包括飞行参数单元和故障检测单元,所述飞行参数单元记录并测量无人机飞行数据,包括飞行高度、飞行速度数据;所述故障检测单元用于检测无人机是否处于故障状态;
19.防护模块,用于对无人机机身进行防护;
20.遥控端,用于与控制模块建立信号连接,向控制单元发送指令,控制飞行动力模块改变无人机飞行状态;
21.故障检测单元判定无人机处于故障状态时,将信号发送至防护模块,防护模块由飞行防撞状态切换至坠落防撞状态,其中飞行防撞状态下,防护模块在无人机周侧建立防撞环;坠落防撞状态下,防护模块在无人机周侧建立密闭防护球层。
22.可选的,所述防护模块还包括:
23.弹射单元:用于从无人机的两个方向弹射出重力球;
24.限位单元:处于常开状态,用于限制弹射单元工作;
25.计算单元:实时抓取无人机飞行数据,并根据无人机飞行数据计算无人机坠落时间t;
26.延时单元:用于延时启动限位单元,其中延时单元内存储有设定值t
设
,延时启动时间t=t t
设
,在计时至t时,发送信号至限位单元;
27.拉力检测单元:用于检测重力球弹出后,重力球产生的最终稳定不变的拉力数值f1与f2;
28.比较单元:存储有标准值m,标准值m为重力球重力,将f1和f2与m比较,判定无人机落点悬空或坠地,并将判定结果发送至控制模块;其中,若f1≥m与f2≥m成立至少一项,则判定无人机悬空,若f1≥m与f2≥m都不成立,则判定无人机坠地;
29.控制模块还包括定位单元,用于定位无人机位置,接收比较单元发送的判定结果,并将无人机位置以及判定结果发送至遥控单元;
30.遥控单元,接收无人机位置以及判定结果并显示。
31.本发明的有益效果:使用时,正常飞行状态下,卡板处于锁紧位置时,限位板对限位销进行限位,抑制移动防护环向着第一防护环的运动趋势,第一防护环配合第二防护环对无人机机身进行防护,防止无人机机身直接与物体发生碰撞,当无人机处于异常飞行状态,则无人机控制模块发送信号至卡板,卡板移动至避让位置,限位板解除对限位销的限位,在扭力弹簧的弹力作用下,扭力轴旋转使得移动防护环向着第一防护环旋转,旋转的同时,收缩布被拉开,使得机体完全被收缩布包裹住,由于收缩布的整体打开,提升了无人机坠落的风阻,降低无人机的坠落速度,减轻碰撞,当无人机掉落至树木上时,第一防护环、第二防护环、移动防护环以及收缩布构成球状,不易被挂在树木上,方便操作人员进行无人机回收。
附图说明
32.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明,对
于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
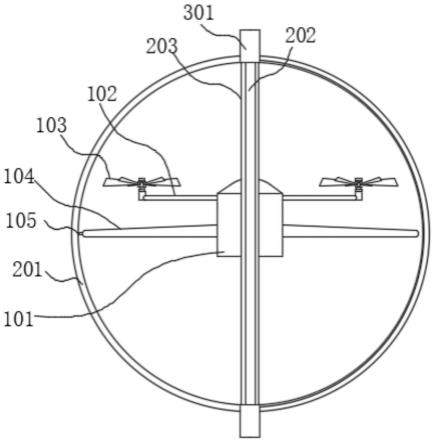
33.图1为本发明实施例一种垂直起降无人机的示意图;
34.图2为本发明实施例一种垂直起降无人机的俯视示意图;
35.图3为本发明实施例一种垂直起降无人机工作状态局部剖视的俯视示意图;
36.图4为本发明实施例一种垂直起降无人机工作状态的俯视示意图;
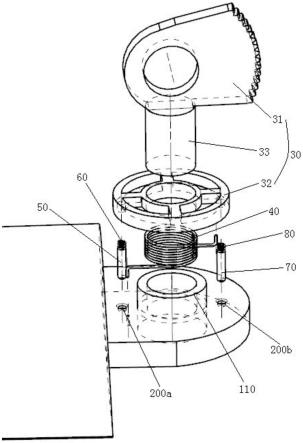
37.图5为本发明实施例一种垂直起降无人机的安装筒的局部剖视示意图;
38.图6为本发明实施例一种垂直起降无人机的工作状态的安装筒的局部剖视示意图;
39.图7为本发明实施例一种垂直起降无人机的安装筒的外部示意图;
40.图8为本发明实施例一种垂直起降无人机的弹射腔的剖视示意图;
41.图9为本发明实施例一种垂直起降无人机的安装筒的侧面剖视示意图。
42.图中标记为:
43.101、机体;102、螺旋支架;103、螺旋桨;104、平衡翼;105、连接轴;201、第一防护环;202、第二防护环;203、移动防护环;204、支撑肋条;205、收缩布;206、扭力轴;207、扭力弹簧;301、安装筒;302、安装腔;303、轴套;304、按压开关;305、限位销;306、避让孔;307、卡板;308、限位板;309、弹射腔;310、弹射筒;311、推板;312、重力球;313、通孔;314、安装座;315、安装轴;316、收线辊;317、拉力计;318、拉线;319、限位座;320、伸缩限位杆;321、手柄;322、回缩弹簧;323、电动伸缩杆;324、弹射弹簧。
具体实施方式
44.为使本发明的目的、技术方案和优点更加清楚明白,以下结合具体实施例,对本发明进一步详细说明。
45.需要说明的是,除非另外定义,本发明使用的技术术语或者科学术语应当为本发明所属领域内具有一般技能的人士所理解的通常意义。本发明中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
46.如图1至图6所示,本发明具体实施例提供一种垂直起降无人机,包括机体101,机体101内安装有控制模块,控制模块电性连接有遥控端,所述机体101上安装有多组螺旋支架102,螺旋支架102上分别安装有螺旋桨103,机体101侧面还安装有至少两组用于调节无人机机身平衡的平衡翼104,所述平衡翼104端部安装有连接轴105,连接轴105可旋转连接有第一防护环201,所述第一防护环201上固定安装有两组安装筒301,两组安装筒301设置于第一防护环201的同一条直径上,所述安装筒301固定连接有两组第二防护环202,两组第二防护环202构成一个完整的圆环,所述第二防护环202两侧分别安装有移动防护环203,移动防护环203与第二防护环202之间连接有收缩布205,所述移动防护环203两端连接有扭力
轴206,安装筒301中设有安装腔302,安装腔302中固定安装有轴套303,扭力轴206适配安装于轴套303中,扭力轴206端部穿过轴套303与安装腔302的内壁可旋转连接,扭力轴206上套设有扭力弹簧207,扭力弹簧207使得移动防护环203具有向着第一防护环201旋转的趋势,扭力轴206上连接有安装柱,安装柱侧面安装有限位销305,安装腔302中还设有卡板307,卡板307两端分别一体成型有限位板308,卡板307至少具有一个锁紧位置和一个避让位置,卡板307处于锁紧位置时,限位板308对限位销305进行限位,抑制移动防护环203向着第一防护环201的运动趋势,卡板307处于避让位置时,限位板308解除对限位销305的限位,移动防护环203向着第一防护环201的运动趋势不受抑制。使用时,螺旋桨103为无人机提供飞行动力,平衡翼104对无人机的飞行姿态进行微调,并为无人机飞行提供助力,正常飞行状态下,卡板307处于锁紧位置时,限位板308对限位销305进行限位,抑制移动防护环203向着第一防护环201的运动趋势,第一防护环201配合第二防护环202对无人机机身进行防护,防止无人机机身直接与物体发生碰撞,当无人机处于异常飞行状态,则无人机控制模块发送信号至卡板307,卡板307移动至避让位置,限位板308解除对限位销305的限位,在扭力弹簧207的弹力作用下,扭力轴206旋转使得移动防护环203向着第一防护环201旋转,旋转的同时,收缩布205被拉开,使得机体101完全被收缩布205包裹住,由于收缩布205的整体打开,提升了无人机坠落的风阻,降低无人机的坠落速度,减轻碰撞,当无人机掉落至树木上时,第一防护环201、第二防护环202、移动防护环203以及收缩布205构成球状,不易被挂在树木上,方便操作人员进行无人机回收。
47.在一些可选的具体实施例中,如图3和图4所示,所述移动防护环203与第二防护环202之间还安装有多组支撑肋条204,多组支撑肋条204两端可旋转安装于安装筒301中,支撑肋条204与收缩布205固定连接。使用时,移动防护环203旋转打开收缩布205的过程中,多组支撑肋条204随之打开,从而对收缩布205提供支撑。
48.在一些可选的具体实施例中,如图9所示,所述卡板307固定连接有电动伸缩杆323,电动伸缩杆323固定安装于安装腔302的内壁上,电动伸缩杆323与控制模块电性连,控制模块检测到无人机飞行异常则控制电动伸缩杆323缩短,使得卡板307从锁紧位置移动至避让位置。
49.在一些可选的具体实施例中,如图9所示,所述卡板307与安装腔302的内壁之间固定连接有回缩弹簧322,回缩弹簧322使得卡板307具有从锁紧位置移动至避让位置的趋势。当无人机遭遇断电故障时,则在回缩弹簧322弹力作用下使得卡板307从锁紧位置移动至避让位置,确保移动防护环203的旋转触发。
50.在一些可选的具体实施例中,如图5至图9所示,所述安装筒301中还设有弹射腔309,弹射腔309中安装有弹射筒310,弹射筒310开口朝向远离机体101的一侧,所述弹射筒310内部安装有弹射弹簧324,所述弹射弹簧324连接有推板311,推板311抵触连接有重力球312,弹射弹簧324被压缩,推板311具有将重力球312弹出的趋势,所述重力球312连接有拉线318,弹射筒310侧壁上开设有通孔313,拉线318自通孔313延伸至弹射腔309中,所述弹射腔309中安装有可旋转的收线辊316,拉线318绕卷于收线辊316上,收线辊316连接有限位单元,拉线318端部固定连接有拉力计317,所述安装柱端部安装有按压开关304,移动防护环203自第二防护环202向第一防护环201旋转过程中,两组相对的按压开关304相互挤压触发,按压开关304与限位单元电性连接,控制模块实时记录无人机飞行高度,并根据飞行高
度计算无人机坠落时间t,限位单元电性连接有延时单元,延时单元设定有延时时间t,则t=t t
设
,其中t
设
为设定值,排除无人机下坠过程中碰撞时间的影响,按压开关304触发后,延时单元启动计时,在延时时间t后,限位单元解除对收线辊316的限位,拉力计317检测拉线318拉力大小并判断无人机的位置状态。在进行时,当无人机飞行状态异常,第二防护环202两侧的移动防护环203自第二防护环202向第一防护环201旋转,同时扭力轴206旋转,带动按压开关304旋转,两组按压开关304旋转接触,延时单元开始计时,当计时至延时时间t时,则限位单元解除对收线辊316的限位,在弹射弹簧324的弹力作用下,推板311将重力球312自弹射筒310中弹出,此时,两组安装筒301中的重力球312都被弹出,两组拉力计317分别检测其连接的拉线318的拉力数据,并根据拉力数据判断无人机的位置状态,能够判断无人机被挂在树木上还是已经坠落地面,对于茂密的丛林环境,能够帮助工作人员缩小搜索范围,只在地面寻找或者树梢寻找,提升找回速度。
51.在一些可选的具体实施例中,如图5至图9所示,两组所述拉力计317分别检测其连接的拉线318的拉力数据f1、f2,拉力计317电性连接有比较单元,比较单元中设有标准重力m,标准重力m为重力球312的重力,若f1≥m与f2≥m成立至少一项,则判定无人机悬空,进一步判定f1≥m与f2≥m是否仅成立其中一项,若是,且判定悬空高度低于拉线318长度,否则不判定无人机悬空高度,若f1≥m或f2≥m都不成立,则判定无人机坠地,判断单元将判断结果发送至控制模块,控制模块将无人机gps定位以及判断结果发送至遥控端。工作人员根据遥控端接收的信息,能够更加准确的掌握无人机的位置,传统的定位仅能定位无人机的水平面上的坐标,根据判断结果,能够大致得到无人机竖直方向的位置,方便工作人员在茂密丛林环境中对无人机进行回收。
52.在一些可选的具体实施例中,如图5至图9所示,所述限位单元包括安装于收线辊316两端的安装轴315,所述弹射腔309内部安装有安装座314,安装轴315安装于安装座314上,安装轴315一端端部连接有限位座319,所述限位座319端面上开设有限位孔,弹射腔309内壁上安装有伸缩限位杆320,所述伸缩限位杆320端部设有与限位孔相适配的限位柱,限位柱插入限位孔中限制收线辊316旋转。使用时,限位单元对收线辊316进行限位时,限位柱插入限位孔中限制收线辊316旋转,当解除对收线辊316的限制时,伸缩限位杆320缩短,使得限位柱自限位孔中拔出。
53.在一些可选的具体实施例中,所述安装轴315远离限位座319的端部延伸至弹射腔309外部,安装轴315位于弹射腔309外部的端部固定连接有手柄321。无人机回收后,通过旋转手柄321将重力球312回收。
54.在一些可选的具体实施例中,所述303的侧壁上开设有避让孔306,用于避让限位销305。
55.本发明的工作原理:使用时,螺旋桨103为无人机提供飞行动力,平衡翼104对无人机的飞行姿态进行微调,并为无人机飞行提供助力,正常飞行状态下,卡板307处于锁紧位置时,限位板308对限位销305进行限位,抑制移动防护环203向着第一防护环201的运动趋势,第一防护环201配合第二防护环202对无人机机身进行防护,防止无人机机身直接与物体发生碰撞,当无人机处于异常飞行状态,则无人机控制模块发送信号至卡板307,卡板307移动至避让位置,限位板308解除对限位销305的限位,在扭力弹簧207的弹力作用下,扭力轴206旋转使得移动防护环203向着第一防护环201旋转,旋转的同时,收缩布205被拉开,使
得机体101完全被收缩布205包裹住,由于收缩布205的整体打开,提升了无人机坠落的风阻,降低无人机的坠落速度,减轻碰撞,当无人机掉落至树木上时,第一防护环201、第二防护环202、移动防护环203以及收缩布205构成球状,不易被挂在树木上,方便操作人员进行无人机回收。
56.当无人机飞行状态异常,第二防护环202两侧的移动防护环203自第二防护环202向第一防护环201旋转,同时扭力轴206旋转,带动按压开关304旋转,两组按压开关304旋转接触,延时单元开始计时,当计时至延时时间t时,则限位单元解除对收线辊316的限位,在弹射弹簧324的弹力作用下,推板311将重力球312自弹射筒310中弹出,此时,两组安装筒301中的重力球312都被弹出,两组拉力计317分别检测其连接的拉线318的拉力数据,并根据拉力数据判断无人机的位置状态,能够判断无人机被挂在树木上还是已经坠落地面,对于茂密的丛林环境,能够帮助工作人员缩小搜索范围,只在地面寻找或者树梢寻找,提升找回速度。
57.本说明书还提供一种垂直起降无人机系统,包括:
58.飞行动力模块,用于提供飞行动力;
59.控制模块,用于控制无人机的整体飞行,包括飞行参数单元和故障检测单元,所述飞行参数单元记录并测量无人机飞行数据,包括飞行高度、飞行速度数据;所述故障检测单元用于检测无人机是否处于故障状态;
60.防护模块,用于对无人机机身进行防护;
61.遥控端,用于与控制模块建立信号连接,向控制单元发送指令,控制飞行动力模块改变无人机飞行状态;
62.故障检测单元判定无人机处于故障状态时,将信号发送至防护模块,防护模块由飞行防撞状态切换至坠落防撞状态,其中飞行防撞状态下,防护模块在无人机周侧建立防撞环;坠落防撞状态下,防护模块在无人机周侧建立密闭防护球层。
63.在一些可选的具体实施例中,所述防护模块还包括:
64.弹射单元:用于从无人机的两个方向弹射出重力球;
65.限位单元:处于常开状态,用于限制弹射单元工作;
66.计算单元:实时抓取无人机飞行数据,并根据无人机飞行数据计算无人机坠落时间t;
67.延时单元:用于延时启动限位单元,其中延时单元内存储有设定值t
设
,延时启动时间t=t t
设
,在计时至t时,发送信号至限位单元;
68.拉力检测单元:用于检测重力球弹出后,重力球产生的最终稳定不变的拉力数值f1与f2;
69.比较单元:存储有标准值m,标准值m为重力球重力,将f1和f2与m比较,判定无人机落点悬空或坠地,并将判定结果发送至控制模块;具体的,若f1≥m与f2≥m成立至少一项,则判定无人机悬空,若f1≥m与f2≥m都不成立,则判定无人机坠地;
70.控制模块还包括定位单元,用于定位无人机位置,接收比较单元发送的判定结果,并将无人机位置以及判定结果发送至遥控单元;
71.遥控单元,接收无人机位置以及判定结果并显示。
72.所属领域的普通技术人员应当理解:以上任何实施例的讨论仅为示例性的,并非
旨在暗示本发明的范围(包括权利要求)被限于这些例子;在本发明的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本发明的不同方面的许多其它变化,为了简明它们没有在细节中提供。
73.本发明旨在涵盖落入所附权利要求的宽泛范围之内的所有这样的替换、修改和变型。因此,凡在本发明的精神和原则之内,所做的任何省略、修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。