技术特征:
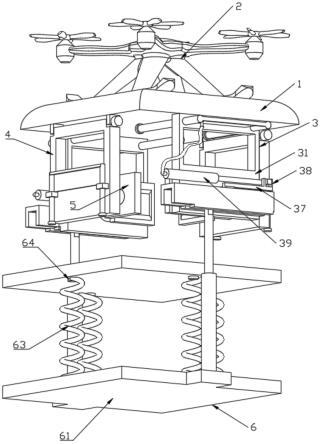
1.一种基于物联网的可实时定位的物流配送无人机,无人机包括底座(1),其特征在于,所述底座(1)的上方固定有无人机本体(2),底座(1)的下方设有两个相对分布的固定臂(3)和两个相对分布的转动臂(4),转动臂(4)和固定臂(3)交错分布于同一个圆周上,转动臂(4)和固定臂(3)上均固定有伸缩件(5),无人机还包括可拆卸的支撑件(6);所述支撑件(6)包括底板(61),底板(61)的上方设有放置板(62),放置板(62)与底板(61)之间连接有多个弹簧(63),所有的弹簧(63)分布于同一个圆周上,该圆周的圆心位于放置板(62)的中线上,放置板(62)的底部固定有多个距离传感器(64),距离传感器(64)用于感应其与底板(61)之间的距离,所有的距离传感器(64)分布于同一个圆周上,该圆周的圆心位于放置板(62)的中线上。2.根据权利要求1所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述固定臂(3)包括固定在底座(1)下方的第一矩形框架(31),第一矩形框架(31)与底座(1)垂直。3.根据权利要求2所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述第一矩形框架(31)的外侧固定有u形滑槽(32),u形滑槽(32)的开口向下,u形滑槽(32)的侧壁下方固定有支撑条(33),支撑条(33)的一端短于u形滑槽(32),u形滑槽(32)的顶板上设有直线滑轨(34),直线滑轨(34)内滑动设有电动滑块(35),电动滑块(35)的下方设有卡合块(36)。4.根据权利要求3所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述第一矩形框架(31)上滑动设有水平的第一u形滑杆(310),第一u形滑杆(310)与第一矩形框架(31)之间连接有第一气囊(311),第一气囊(311)位于第一u形滑杆(310)的外侧,第一u形滑杆(310)与第一矩形框架(31)之间连接有弹性绳(313)。5.根据权利要求4所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述电动滑块(35)的上方贯穿u形滑槽(32)固定有连接条(37),连接条(37)上固定有第一连接块(38),第一矩形框架(31)上固定有水平的气筒(39),气筒(39)的推杆固定在第一连接块(38)上,第一气囊(311)与气筒(39)之间连通设有第一软管(312)。6.根据权利要求4所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述转动臂(4)包括位于底座(1)下方转动的第二矩形框架(41),底座(1)上固定有用于驱动第二矩形框架(41)转动的电机(42)。7.根据权利要求6所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述第二矩形框架(41)的外侧固定有两个轴套(43),转动臂(4)还包括与第二矩形框架(41)平行的第二u形滑杆(44),第二u形滑杆(44)的两侧侧杆分别套装在两个轴套(43)内,第二u形滑杆(44)与轴套(43)之间连接有第二气囊(45),第二气囊(45)位于轴套(43)靠近底座(1)一侧,第二气囊(45)与第一气囊(311)之间连通设有第二软管(46)。8.根据权利要求6所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述伸缩件(5)包括第一电动伸缩杆(51),固定臂(3)和转动臂(4)上的第一电动伸缩杆(51)分别固定在第一矩形框架(31)和第二矩形框架(41)的内侧,第一电动伸缩杆(51)的输出轴上固定有夹板(52),夹板(52)远离第一电动伸缩杆(51)的一侧固定有缓冲垫(53)。9.根据权利要求3所述的一种基于物联网的可实时定位的物流配送无人机,其特征在于,所述底板(61)的两侧均固定有第二连接块(65),第二连接块(65)的上方固定有第二电
动伸缩杆(66),第二电动伸缩杆(66)的输出轴上固定有滑动块(67),滑动块(67)的上方开设有插槽(68),通过将卡合块(36)卡入插槽(68)内,通过将滑动块(67)滑入u形滑槽(32)与支撑条(33)之间实现对支撑件(6)的安装。
技术总结
本发明在于提供一种基于物联网的可实时定位的物流配送无人机,包括底座,底座的上方固定有无人机本体,底座的下方设有两个相对分布的固定臂和两个相对分布的转动臂,转动臂和固定臂交错分布于同一个圆周上,转动臂和固定臂上均固定有伸缩件,无人机还包括可拆卸的支撑件。本发明无人机通过将物件放置在放置板上,收缩第二电动伸缩杆控制放置板上升,使得夹板分布于物件的四周,当放置板下方的距离传感器感应的距离存在差异时,启动数值较小的距离传感器所对应的第一电动伸缩杆,对物件的放置位置进行调节,使其重心位于无人机本体上,通过将物件的重心调节至无人机本体的中线,可以尽可能的保证无人机在飞行时不发生歪斜。以尽可能的保证无人机在飞行时不发生歪斜。以尽可能的保证无人机在飞行时不发生歪斜。
技术研发人员:李斌 缪德俊 史治国 沈渊 汪澍萌
受保护的技术使用者:扬州市职业大学(扬州开放大学)
技术研发日:2022.10.09
技术公布日:2022/12/9
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。