1.本发明提供一种高速飞行器追逃微分博弈的邻近凸优化方法,它是一种求解高速飞行器在空间中追逐逃逸策略的微分博弈方法,属于航空航天;制导、导航与控制技术;微分博弈领域。
背景技术:
2.近年来,世界各国对空天资源的需求越来越多,使得高速飞行器需要执行多种任务;高速飞行器在执行任务过程中有时需要捕获某一物体,或规避空间残骸撞击,这一类任务可以视为典型的追逃微分博弈问题;
3.在实际应用中,针对这种追逃微分博弈问题,现今的方法主要是采用近似的解析公式求解两点边值问题或动态规划问题,或采用离线数值方法对追逃博弈问题进行求解;这种求解方法通常难以适应多约束情况,或者不具备在线使用的能力;因此,研究能够在线求解追逃微分博弈问题的方法成为航空航天领域研究的重点和难点问题;
4.综上所述,本发明为解决现有高速飞行器追逃微分博弈难题,针对约束条件下的高速飞行器追逃微分博弈进行求解设计一种邻近凸优化方法,该方法广泛适用于追逃微分博弈任务,具有一定独创性。
技术实现要素:
5.(一)本发明的目的
6.本发明提出一种高速飞行器追逃微分博弈的邻近凸优化方法,针对真空环境中飞行时间固定的高速飞行器追逃微分博弈任务,约束条件下的追逃微分博弈问题在线求解困难,因此利用邻近凸优化方法将追逃微分博弈问题转化为凸最优控制问题进行求解,以解决现有技术存在的通用性差、难以在线等问题。
7.(二)技术方案
8.本发明一种高速飞行器追逃微分博弈的邻近凸优化方法,其具体步骤如下:
9.步骤一、建立高速飞行器追逃微分博弈最小最大问题模型;
10.根据任务需求,给出高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束,指定问题的支付函数,建立高速飞行器追逃微分博弈最小最大问题;
11.步骤二、建立高速飞行器追逃微分博弈邻近优化子问题;
12.根据步骤一建立的高速飞行器追逃微分博弈最小最大问题模型,在其中引入邻近算子,建立高速飞行器追逃微分博弈关于追击者与逃逸者的邻近优化子问题;
13.步骤三、建立高速飞行器追逃微分博弈邻近凸优化子问题;
14.根据步骤二建立的高速飞行器追逃微分博弈邻近优化子问题,采用线性化方法对问题的过程约束、终端约束与性能指标进行凸化,形成高速飞行器追逃微分博弈邻近凸最优控制子问题,经等时间间隔离散化处理,建立高速飞行器追逃微分博弈邻近凸优化子问题;
15.步骤四、给定初始猜想,迭代求解高速飞行器追逃微分博弈邻近凸优化子问题;
16.其中,在步骤一中所述的“高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束”,为:
[0017][0018]
式中x
p
与u
p
分别为追击者的状态量与控制量,xe与ue分别为逃逸者的状态量与控制量,p
p
与pe分别为追击者与逃逸者的过程约束,ψ
p
与ψe分别为追击者与逃逸者的终端约束,x
p,0
与x
e,0
分别为追击者与逃逸者的初始状态;
[0019]
其中,在步骤一中所述的“问题的支付函数”,为:
[0020][0021]
其中,在步骤一中所述的“高速飞行器追逃微分博弈最小最大问题”,为:
[0022][0023]
其中,在步骤二中所述的“邻近算子”,为:||x(t)-x
(k)
(t)||2(4)
[0024]
式中,x为追击者或逃逸者的状态量,x
(k)
为追击者或逃逸者在第k次迭代过程中状态量的初始猜想;
[0025]
其中,在步骤二中所述的“高速飞行器追逃微分博弈关于追击者与逃逸者的邻近优化子问题”,为:
[0026][0027]
[0028]
式中,与分别为第k次迭代过程中追击者与逃逸者状态的估计,γ为惩罚因子,根据经验其通常取1-1000;
[0029]
其中,在步骤三中所述的“线性化方法”,是制导、导航与控制技术中的经典方法,该技术为本领域的公知技术;
[0030]
其中,在步骤三中所述的“高速飞行器追逃微分博弈邻近凸最优控制子问题”,为:
[0031][0032][0033]
式中,与分别为第k次迭代过程中追击者与逃逸者控制量的估计,η1与η2为松弛变量;
[0034]
其中,在步骤三中所述的“等时间间隔离散化方法”,是制导、导航与控制技术中的经典方法,该技术为本领域的公知技术;
[0035]
其中,在步骤三中所述的“高速飞行器追逃微分博弈邻近凸优化子问题”,为:
[0036][0037][0038]
式中,a
p,i
、z
p,i
与a
e,i
、z
e,i
分别为追击者与逃逸者的状态转移矩阵;
[0039]
其中,在步骤四中所述的“初始猜想”,是对追击者与逃逸者状态量与控制量的估计与
[0040]
其中,在步骤四中所述的“迭代求解”,是指:根据初始猜想,对高速飞行器追逃微分博弈邻近凸优化子问题进行求解,并将求解结果作为下一次求解的初始猜想,当求解结果与初始猜想之间的偏差小于容许误差时,停止求解;根据经验,容许误差取0.001-0.0001;
[0041]
通过以上步骤,可以实现高速飞行器追逃微分博弈,该方法可在线应用,达到了较好的稳定性和普适性。
[0042]
(三)本发明的优点及功效
[0043]
(1)本发明利用邻近凸优化方法将追逃微分博弈问题转化为凸最优控制问题进行求解,能够得到追逃微分博弈策略,可以在线使用;
[0044]
(2)本发明所述方法科学,工艺性好,具有广阔推广应用价值。
附图说明
[0045]
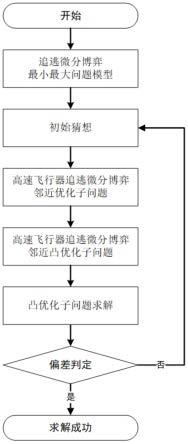
图1是本发明所述方法流程图。
[0046]
图2是本发明实施例中高速飞行器飞行轨迹示意图。
[0047]
图3是本发明实施例中高速飞行器控制结果示意图。
具体实施方式
[0048]
下面将结合附图和实施案例对本发明作进一步的详细说明。
[0049]
本发明一种高速飞行器追逃微分博弈的邻近凸优化方法,其流程图如图1所示,它包括以下几个步骤:
[0050]
步骤一、建立高速飞行器追逃微分博弈最小最大问题模型;
[0051]
在本实施例中,给出高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束:
[0052]
其中,在步骤一中所述的“高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束”,为:
[0053][0054]
式中x
p
与u
p
分别为追击者的状态量与控制量,xe与ue分别为逃逸者的状态量与控制量,p
p
与pe分别为追击者与逃逸者的过程约束,ψ
p
与ψe分别为追击者与逃逸者的终端约束,x
p,0
与x
e,0
分别为追击者与逃逸者的初始状态,在本实施例中,高速飞行器追逃微分博弈追击者与逃逸者的状态量为速度与位置组成的矢量,控制量为加速度,其动力学与约束为:
[0055][0056]
式中u
p,max
与u
e,max
分别为追击者与逃逸者的控制量幅值上限,ac与bc分别为:
[0057][0058]
指定问题的支付函数为:
[0059][0060]
建立高速飞行器追逃微分博弈最小最大问题:
[0061][0062]
步骤二、建立高速飞行器追逃微分博弈邻近优化子问题;
[0063]
根据步骤一建立的高速飞行器追逃微分博弈最小最大问题模型,在其中引入邻近算子:
[0064]
||x(t)-x
(k)
(t)||2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0065]
式中,x为追击者或逃逸者的状态量,x
(k)
为追击者或逃逸者在第k次迭代过程中状态量的初始猜想。建立高速飞行器追逃微分博弈关于追击者与逃逸者的邻近优化子问题:
[0066][0067][0068]
式中,与分别为第k次迭代过程中追击者与逃逸者状态的估计,γ为惩罚因子,本实施例中,惩罚因子取10;
[0069]
步骤三、建立高速飞行器追逃微分博弈邻近凸优化子问题;
[0070]
根据步骤二建立的高速飞行器追逃微分博弈邻近优化子问题,采用线性化方法对问题的过程约束、终端约束与性能指标进行凸化,形成高速飞行器追逃微分博弈邻近凸最优控制子问题:
[0071]
[0072][0073]
式中,与分别为第k次迭代过程中追击者与逃逸者控制量的估计,η1与η2为松弛变量。经等时间间隔离散化处理,建立高速飞行器追逃微分博弈邻近凸优化子问题:
[0074][0075][0076]
式中,a、b
、b-、为:
[0077][0078]
式中,δt=tf/n为离散时间间隔,tf为飞行时间,n为离散点数量,在本实施例中,取n=1;
[0079]
步骤四、给定对追击者与逃逸者状态量与控制量的估计与对高速飞行器追逃微分博弈邻近凸优化子问题进行求解,并将求解结果作为下一次求解的初始猜想,当求解结果与初始猜想之间的偏差小于容许误差时,停止
求解;本实施例中,容许误差取0.0001;
[0080]
仿真案例:
[0081]
本部分将以一个数值仿真案例作为方法演示,并非实际飞行任务;
[0082]
追击者与逃逸者的无量纲初始状态分别为x
p,0
=[-2,0]
t
与x
e,0
=[0,1]
t
,无量纲化飞行时间为tf=2,控制量幅值上限为:
[0083]up,max
=8,u
e,max
=5
[0084]
第一次迭代求解给定的初始猜想为:
[0085][0086][0087]
根据本方法实施过程,得到追击者与逃逸者飞行轨迹示意图如图2所示,追击者与逃逸者控制结果示意图如图3所示,使用该方法能给出高速飞行器追逃微分博弈中追击者与逃逸者的飞行策略。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。