技术特征:
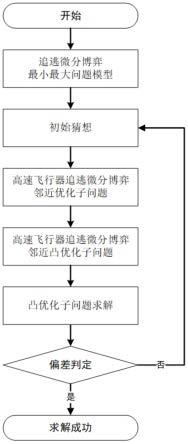
1.一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:具体步骤如下:步骤一、建立高速飞行器追逃微分博弈最小最大问题模型;根据任务需求,给出高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束,指定问题的支付函数,建立高速飞行器追逃微分博弈最小最大问题;步骤二、建立高速飞行器追逃微分博弈邻近优化子问题;根据步骤一建立的高速飞行器追逃微分博弈最小最大问题模型,在其中引入邻近算子,建立高速飞行器追逃微分博弈关于追击者与逃逸者的邻近优化子问题;步骤三、建立高速飞行器追逃微分博弈邻近凸优化子问题;根据步骤二建立的高速飞行器追逃微分博弈邻近优化子问题,采用线性化方法对问题的过程约束、终端约束与性能指标进行凸化,形成高速飞行器追逃微分博弈邻近凸最优控制子问题,经等时间间隔离散化处理,建立高速飞行器追逃微分博弈邻近凸优化子问题;步骤四、给定初始猜想,迭代求解高速飞行器追逃微分博弈邻近凸优化子问题。2.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤一中所述的“高速飞行器追逃微分博弈追击者与逃逸者的动力学与约束”,为:式中x
p
与u
p
分别为追击者的状态量与控制量,x
e
与u
e
分别为逃逸者的状态量与控制量,p
p
与p
e
分别为追击者与逃逸者的过程约束,ψ
p
与ψ
e
分别为追击者与逃逸者的终端约束,x
p,0
与x
e,0
分别为追击者与逃逸者的初始状态。3.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤一中所述的“问题的支付函数”,为:4.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤一中所述的“高速飞行器追逃微分博弈最小最大问题”,为:5.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤二中所述的“邻近算子”,为:||x(t)-x
(k)
(t)||2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)式中,x为追击者或逃逸者的状态量,x
(k)
为追击者或逃逸者在第k次迭代过程中状态量
的初始猜想。6.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤二中所述的“高速飞行器追逃微分博弈关于追击者与逃逸者的邻近优化子问题”,为:,为:式中,与分别为第k次迭代过程中追击者与逃逸者状态的估计,γ为惩罚因子,取1-1000。7.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤三中所述的“高速飞行器追逃微分博弈邻近凸最优控制子问题”,为:
式中,与分别为第k次迭代过程中追击者与逃逸者控制量的估计,η1与η2为松弛变量。8.根据权利要求1所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤三中所述的“高速飞行器追逃微分博弈邻近凸优化子问题”,为:
式中,a
p,i
、z
p,i
与a
e,i
、z
e,i
分别为追击者与逃逸者的状态转移矩阵。9.根据权利要求1或5所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤四中所述的“初始猜想”,是对追击者与逃逸者状态量与控制量的估计与10.根据权利要求1或8所述的一种高速飞行器追逃微分博弈的邻近凸优化方法,其特征在于:在步骤四中所述的“迭代求解”,是指:根据初始猜想,对高速飞行器追逃微分博弈邻近凸优化子问题进行求解,并将求解结果作为下一次求解的初始猜想,当求解结果与初始猜想之间的偏差小于容许误差时,停止求解;根据经验,容许误差取0.001-0.0001。
技术总结
本发明提供一种高速飞行器追逃微分博弈的邻近凸优化方法,其具体步骤如下:一、建立高速飞行器追逃微分博弈最小最大问题模型;二、建立高速飞行器追逃微分博弈邻近优化子问题;三、建立高速飞行器追逃微分博弈邻近凸优化子问题;四、给定初始猜想,迭代求解高速飞行器追逃微分博弈邻近凸优化子问题。通过以上步骤,可以实现高速飞行器追逃微分博弈,该方法可在线应用,达到了较好的稳定性和普适性。达到了较好的稳定性和普适性。达到了较好的稳定性和普适性。
技术研发人员:张冉 李惠峰 郝泽明
受保护的技术使用者:北京航空航天大学
技术研发日:2022.08.15
技术公布日:2022/12/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。