1.本公开涉及安全开关装置。
背景技术:
2.已知一种机器人操作单元,其能够拆卸地安装于市售的便携终端,并构成机器人的示教装置(例如,参照专利文献1。)。
3.该机器人操作单元具备:具备紧急停止按钮等的操作单元主体;以及将操作单元主体安装于便携终端的附件。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2017-202550号公报
技术实现要素:
7.发明要解决的问题
8.为了将操作单元主体安装到尺寸不同的便携终端,附件以能够在便携终端的宽度方向上移动的方式设置于操作单元主体,并通过螺旋弹簧的弹力,将便携终端夹在附件与操作单元主体之间。
9.安装于操作单元的便携终端不由操作者直接握持,而是在通过握持操作单元从而间接握持的状态下进行操作。因此,便携终端在由操作者操作时,优选不仅在被操作单元主体和附件夹持的方向上,而且在三维方向上也相对于操作单元不发生偏移。
10.用于解决问题的方案
11.本公开的一方面是一种安全开关装置,所述安全开关装置具备装置主体和可动部,所述可动部以能够在规定的移动方向上移动的方式设置于该装置主体,所述装置主体具备背面支撑部和主体侧夹持部,所述背面支撑部具有支撑便携终端的背面的支撑面,所述主体侧夹持部按压处于支撑于该背面支撑部的状态的所述便携终端的一边,所述可动部具备可动部侧夹持部,所述可动部侧夹持部在所述移动方向上与所述主体侧夹持部相对配置,并按压所述便携终端的另一边,所述主体侧夹持部以及所述可动部侧夹持部分别具备与所述便携终端的一边或另一边紧贴的倾斜面,各该倾斜面随着沿与所述支撑面正交的方向远离该支撑面,而向在所述移动方向上相互接近的方向倾斜,在所述支撑面的与所述便携终端的背面紧贴的区域,实施了使摩擦系数比所述装置主体的其他部位的表面大的处理。
附图说明
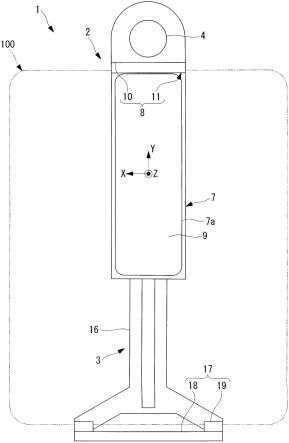
12.图1是示出本公开的一个实施方式的安全开关装置的主视图。
13.图2是图1的安全开关装置的侧视图。
14.图3是图1的安全开关装置的后视图。
15.图4是示出操作者握持图1的安全开关装置的装置主体的状态的后视图。
16.图5是示出图1的安全开关装置的第一夹持部的局部放大图。
17.图6是示出图5的第一夹持部具备的第一弹性部件的背面的立体图。
18.图7是说明图6的第一弹性部件向第一夹持部的抵接面进行安装的立体图。
19.图8是示出图5的第一夹持部的局部纵截面图。
20.图9是示出图1的安全开关装置的第二夹持部的局部放大图。
21.图10是说明图6的第一弹性部件的变形例的局部放大图。
具体实施方式
22.以下参照附图对本公开的一个实施方式的安全开关装置1进行说明。
23.如图1所示,本实施方式的安全开关装置1具备装置主体2和滑动件(可动部)3,其中,装置主体2具有长度方向,滑动件3以能够沿着长度方向(移动方向:y方向)移动的方式安装于装置主体2。装置主体2以及滑动件3例如由硬质的树脂构成。
24.如图1所示,在装置主体2的表面侧具备紧急停止按钮4,如图2以及图3所示,在装置主体2的背面侧具备安全开关5。紧急停止按钮4配置在接近装置主体2的长度方向的一端侧的位置。在装置主体2的长度方向的另一端侧安装有电缆6,电缆6将紧急停止按钮4以及安全开关5与未图示的控制装置连接。
25.如图4所示,安全开关5配置在当操作者用右手或者左手握持装置主体2时正好配置握持的手的食指或者拇指的位置。通过操作者用握持装置主体2的手的食指或拇指按压安全开关5,从而便携终端100的操作被允许,通过使手与安全开关5分离,从而变成紧急停止状态。
26.如图1以及图2所示,在装置主体2的表面侧设置有背面支撑部7和第一夹持部(主体侧夹持部)8,背面支撑部7在安装了便携终端100时支撑便携终端100的背面,第一夹持部8配置在背面支撑部7的长度方向的一端侧。背面支撑部7具备在y方向以及与y方向正交的x方向这2个方向上延伸的平坦面(支撑面)7a。
27.在平坦面7a上固定有由摩擦系数比装置主体2的其他部位的表面大的材质例如硅胶构成的片9。
28.如图5以及图7所示,第一夹持部8具备从平坦面7a的y方向的一端沿与平坦面7a正交的xz方向延伸并抵靠便携终端100的一端缘的抵接面(主体侧基部)10。另外,第一夹持部8具备第一弹性部件11,第一弹性部件11能够拆卸地安装于抵接面10,且由弹性材料构成。
29.如图7以及图8所示,在抵接面10上设置有沿y方向突出的突起(突起部)12,在该突起12上设置有钩部13,钩部13从在x方向上隔开间隔的2个部位向接近平坦面7a的方向沿着z方向突出。
30.如图5所示,第一弹性部件11具备倾斜面14,倾斜面14由在第一弹性部件11安装于抵接面10的状态下随着沿z方向远离平坦面7a而向沿y方向远离抵接面10的方向倾斜的平面构成。
31.另外,如图6所示,在第一弹性部件11上设置有凹部15,凹部15为使抵接面10的突起12以及钩部13嵌合的形状(与突起12以及钩部13互补的形状)。第一弹性部件11通过弹性变形而使凹部15变形,并使突起12以及钩部13嵌合到凹部15内,通过使弹性变形复原,从而
安装于抵接面10。
32.如图1所示,滑动件3具备带板状的滑动部16和第二夹持部(可动部侧夹持部)17,滑动部16以沿y方向能够移动的方式收纳在设置于装置主体2的未图示的槽中,第二夹持部17设置在滑动部16的一端。如图9所示,第二夹持部17也具备抵接面(可动部侧基部)18和第二弹性部件19,抵接面18从滑动部16沿与y方向正交的xz方向延伸,并抵靠便携终端100的另一端缘,第二弹性部件19能够拆卸地安装于抵接面18,且由弹性材料构成。
33.第二弹性部件19也具备倾斜面20,倾斜面20由在第二弹性部件19安装于抵接面18的状态下随着沿z方向远离装置主体2的平坦面7a而向沿y方向远离抵接面18的方向倾斜的平面构成。
34.另外,在抵接面18上,与抵接面10同样地设置有沿y方向突出的平板状的突起,在该突起上设置有钩部,钩部从在x方向上隔开间隔的2个部位向接近平坦面7a的方向沿着z方向突出。
35.在第二弹性部件19上设置有使抵接面18的突起以及钩部嵌合的形状的凹部。第二弹性部件19通过弹性变形而使凹部变形,并使突起以及钩部嵌合到凹部15内,通过使弹性变形复原,从而能够拆卸地安装于抵接面18。抵接面18的突起、钩部以及第二弹性部件19的凹部与抵接面10以及第一弹性部件11为相同的形状,因此省略了图示。
36.如图1以及图2所示,第一夹持部8和第二夹持部17配置于在y方向上相对的位置。由此,设置于第一夹持部8的第一弹性部件11的倾斜面14和设置于第二夹持部17的第二弹性部件19的倾斜面20随着沿z方向远离平坦面7a而向相互接近的方向倾斜。
37.以下对以如上方式构成的本实施方式的安全开关装置1的作用进行说明。
38.本实施方式的安全开关装置1安装便携终端100而使用。
39.作为便携终端100,可列举出多功能形式电话终端(智能手机)或者平板电脑终端等。为了将便携终端100安装到安全开关装置1,将滑动件3从装置主体2沿y方向拉出,并使配置在第一夹持部8与第二夹持部17之间的便携终端100的背面与平坦面7a的片9紧贴。
40.在该状态下,相对装置主体2沿y方向按压滑动件3,将便携终端100夹入第一夹持部8与第二夹持部17之间。由此,使得便携终端100安装于安全开关装置。滑动件3相对于装置主体2的位置能够在y方向上自由变更。由此,能够将不同大小的便携终端100容易地安装到安全开关装置1。
41.在该状态下,如图5所示,设置于第一夹持部8的第一弹性部件11的倾斜面14与便携终端100的y方向的一端缘紧贴。另一方面,如图9所示,设置于第二夹持部17的第二弹性部件19的倾斜面20与便携终端100的y方向的另一端缘紧贴。
42.由于两个倾斜面14、20随着远离平坦面7a而向相互接近的方向倾斜,因此如图8所示,在各倾斜面14、20与便携终端100的紧贴点处,从倾斜面14、20侧向便携终端100,在与倾斜面14、20正交的方向上作用按压力f。按压力f产生y方向以及z方向的分力fy,fz。y方向的分力fy由于在第一夹持部8以及第二夹持部17中以相同大小作用于相反方向,因此相互抵消。
43.通过z方向的分力fz,便携终端100压靠于装置主体2的平坦面7a。由此,便携终端100以相对于装置主体2在z方向上不移动的方式被固定。另外,由于在平坦面7a固定有由摩擦系数大的材质构成的片9,因此能够使装置主体2与便携终端100之间在xy方向上作用大
的摩擦力。即,便携终端100如果不对装置主体2作用超过该大的摩擦力的力,则无法在xy方向上移动,便携终端100被装置主体2可靠地固定。
44.另外,由于与便携终端100的一端缘以及另一端缘接触的倾斜面14、20设置于第一弹性部件11以及第二弹性部件19,因此第一弹性部件11以及第二弹性部件19在与便携终端100的接触位置发生弹性变形,使与便携终端100的接触面积增大。由此,在第一弹性部件11以及第二弹性部件19与便携终端100之间产生的摩擦力,尤其是x方向的摩擦力增大,能够更有效地防止便携终端100相对于装置主体2在x方向上发生位置偏移。
45.另外,为了使滑动件3相对于装置主体2在y方向上移动并保持在移动后的位置,存在在装置主体2与滑动件3之间配置有棘轮机构(省略图示)的情况。在这种情况下,第一夹持部8与第二夹持部17的间隔调整是以棘轮机构的齿的间距单位离散地进行的。
46.在这种情况下,具有如下优点:通过在第一夹持部8上设置第一弹性部件11,在第二夹持部17上设置第二弹性部件19,从而即使进行离散的间隔调整,也能够将便携终端100无间隙地夹在第一夹持部8与第二夹持部17之间。
47.另外,由于第一弹性部件11以及第二弹性部件19能够拆卸地安装于抵接面10、18,因此能够根据要安装的便携终端100的厚度或者端缘的形状,更换为最佳的形状或材质。在这种情况下,使第一弹性部件11以及第二弹性部件19弹性变形而从突起12以及钩部13拆下,安装时,也仅使第一弹性部件11以及第二弹性部件19弹性变形而使突起12以及钩部13嵌合于凹部15,就能够简单地安装上。
48.另外,第一弹性部件11以及第二弹性部件19受到与将便携终端100按压于平坦面7a的方向的分力fz相反方向的反作用力fz
′
。
49.在本实施方式中,钩部13向与作用于第一弹性部件11以及第二弹性部件19的反作用力fz
′
相反的方向延伸,并嵌合于凹部15,因此能够防止突起12因反作用力而从凹部15拔出。
50.为了使用在安装有安全开关装置1的状态下的便携终端100,如图4所示,操作者用左手或右手握持配置在便携终端100的背面的安全开关装置1的装置主体。并且,操作者用握持的手的食指或拇指按下安全开关5。由此允许由操作者对便携终端100的操作,因此能够进行机器人的示教作业等。
51.另外,在机器人的示教作业过程中,如果按下设置于安全开关装置1的紧急停止按钮4或解除安全开关5的按下状态,则能够使机器人处于紧急停止状态。
52.在这种情况下,操作者仅直接握持装置主体2,不直接握持便携终端100。根据本实施方式,通过上述结构,具备如下优点:即使在便携终端100上作用有自重或者大的外力,也能够稳定地保持便携终端100,使其不会从装置主体2向xyz方向的任何方向错位。
53.此外,在本实施方式中,第一弹性部件11以及第二弹性部件19具备平面状的倾斜面14、20,但取而代之,也可以具备由曲面构成的倾斜面14、20。在这种情况下,如图10所示,可以弯曲为如下形态:随着沿z方向远离装置主体2的平坦面7a而与平坦面7a所成的夹角逐渐变小。
54.由此,如图10所示,要安装的便携终端100的厚度越大,重量越重,则越能够增大便携终端100从第一弹性部件11以及第二弹性部件19受到的z方向的分力。因此,具有如下优点:能够在xyz方向上以更大的力保持便携终端100。
55.另外,在能够拆卸于抵接面10、18的第一弹性部件11以及第二弹性部件19上设置有倾斜面14、20,但取而代之,第一弹性部件11以及第二弹性部件19也可以固定于抵接面10、18。另外,也可以不使用第一弹性部件11以及第二弹性部件19,而使抵接面10、18本身为倾斜面14、20。
56.另外,虽在各突起12上在x方向上隔开间隔地设置了两处钩部13,但钩部13的数量可以是1以上的任意数量。
57.附图标记说明:
[0058]1ꢀꢀꢀ
安全开关装置
[0059]2ꢀꢀꢀ
装置主体
[0060]3ꢀꢀꢀ
滑动件(可动部)
[0061]7ꢀꢀꢀ
背面支撑部
[0062]
7a
ꢀꢀ
平坦面(支撑面)
[0063]8ꢀꢀꢀ
第一夹持部(主体侧夹持部)
[0064]
10
ꢀꢀ
抵接面(主体侧基部)
[0065]
11
ꢀꢀ
第一弹性部件
[0066]
12
ꢀꢀ
突起(突起部)
[0067]
13
ꢀꢀ
钩部
[0068]
14
ꢀꢀ
倾斜面
[0069]
15
ꢀꢀ
凹部
[0070]
17
ꢀꢀ
第二夹持部(可动部侧夹持部)
[0071]
18
ꢀꢀ
抵接面(可动部侧基部)
[0072]
19
ꢀꢀ
第二弹性部件
[0073]
20
ꢀꢀ
倾斜面
[0074]
100 便携终端
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
