无人机系统通信
相关申请的交叉引用
1.本技术要求于2021年1月12日提交的美国临时申请第63/136,330号和于2021年9月17日提交的美国申请第17/477,979号的优先权,这两个申请的公开内容通过引用整体并入本文。
技术领域
2.本公开的实施例涉及无人机系统的操作,并且更具体地涉及实时uav网络连接检测和位置报告。
背景技术:
3.作为最近技术发展的结果,无人机(uav)已经变得相当容易飞行,这又使得它们不仅受到专业uav飞行员和坚定且富裕的业余爱好者的欢迎,而且受到公众的欢迎。因此,与大约15年前几千架(如果有这么多的话)模型直升机相比,现在每年有数百万架uav售出。同时,用户社区的知识、熟练程度和参与度平均有所下降。
技术实现要素:
4.根据实施例,一种无人机(uav)连接检测和位置报告的方法由至少一个处理器实施,并且包括:由无人机系统应用使能器(uae)服务器从位置管理(lm)服务器接收指示uav的位置的位置报告;由uae服务器接收指示失去与uav的连接的丢失连接报告;由uae服务器从网络资源管理(nrm)服务器接收连接恢复报告,该连接恢复报告指示与uav的连接已被重建;以及基于接收连接恢复报告,从uae服务器向lm服务器发送位置更新请求。
5.根据实施例,一种用于实施无人机系统应用使能器(uae)服务器的设备包括至少一个处理器;以及包括计算机代码的存储器,该计算机代码包括:第一接收代码,该第一接收代码被配置为使该至少一个处理器从位置管理(lm)服务器接收指示无人机(uav)的位置的位置报告;第二接收代码,该第二接收代码被配置为使该至少一个处理器接收指示失去与该uav的连接的丢失连接报告;第三接收代码,该第三接收代码被配置为使该至少一个处理器从网络资源管理(nrm)服务器接收连接恢复报告,该连接恢复报告指示与该uav的连接已被重建;以及发送代码,该发送代码被配置为使该至少一个处理器基于接收该连接恢复报告,向lm服务器发送位置更新请求。
6.根据实施例,一种存储计算机代码的非易失性计算机可读介质,该计算机代码被配置为当由包括在用于无人机(uav)连接检测和位置报告的设备中的至少一个处理器执行时,使该至少一个处理器:由无人机系统应用使能器(uae)服务器从位置管理(lm)服务器接收指示uav的位置的位置报告;由uae服务器接收指示失去与uav的连接的丢失连接报告;由uae服务器从网络资源管理(nrm)服务器接收连接恢复报告,该连接恢复报告指示与该uav的连接已被重建;以及基于接收该连接恢复报告,从uae服务器向lm服务器发送位置更新请求。
附图说明
7.从以下详细描述和附图中,所公开的主题的其它特征、性质以及各种优点将更加明显,其中:
8.图1是无人机系统(uas)的示意图。
9.图2是包括与至少一个服务器通信的uas的uas的示意图。
10.图3是根据实施例的包括uas的系统的示意图。
11.图4是根据实施例的包括uas的系统的示意图。
12.图5是uas的示例seal通用架构的示意图。
13.图6是根据实施例的无人机(uav)连接检测和位置报告的高级工作流的示意图。
14.图7是根据实施例的无人机(uav)连接检测和位置报告的高级工作流的示意图。
15.图8是根据实施例的uae服务器的计算机代码的示意图。
16.图9是根据实施例的计算机系统的示意图。
具体实施方式
17.参考图1,无人机系统(uas)(100)可以包括无人机(uav)(101)和控制器(102)。控制器(102)可以使用数据链路(103)来将控制命令从控制器(102)传送到uav(101)。控制器(102)可以包括至少一个通信电路,该通信电路被配置为经由甚高频(vhf)、超高频(uhf),或者模拟或数字无线电传送的其它无线技术来提供构成数据链路(103)的通信。控制器(102)可以经由数据链路(103)来控制uav(101)的发动机(114)的功率水平或控制uav(101)的表面。也可以使用类似于直升机或飞机的那些更抽象的命令,如俯仰、偏航和滚动。经验丰富的飞行员可以利用那些基本控制来操作一些uav,而不依赖于uav内部的控制信号的任何高级机载处理。uav已经有许多形式,包括直升机和飞机。
18.最近,机载电子设计的进步允许将某些任务从人类操作者转移到uav本身。如今,许多uav包括向uav(101)的机载控制器(105)指示uav(101)的特性(诸如例如,uav(101)的姿态和加速度)的一个或多个传感器(104)。机载控制器(105)可以是具有按比例缩小的或不存在用户界面的计算机系统。除了从数据链路(103)接收的来自控制器(102)的控制输入之外,由一个或多个传感器(104)获得的信息可以允许uav(101)保持稳定,除非从控制器(102)获得正控制输入。
19.甚至最近,uav可以包括接收器(106),该接收器(106)被配置为从全球导航卫星系统(gnss)中的一个接收通信,诸如由美国运营的全球定位系统(gps)。图1图示了提供信号(107)作为此类通信以表示gnss的单个卫星(108)。然而,uav(101)的接收器(106)可以接收来自gnss的通信,该gnss包括三个或更多个、并且典型地四个或更多个视线卫星,以对uav(101)在空间中的位置进行三角测量。接收器(106),可以是gnss接收器,可以以相当的精度确定uav(101)在空间和时间上的位置。在一些uav中,可以通过在垂直(z-)轴上的uav(101)的附加传感器(诸如超声波或lidar传感器)来增强gnss,以实现软着陆(未描绘)。根据一些实施例,uav(101)可以被配置为基于gnss能力来执行诸如“飞回家”和“自动着陆”的特征,其中uav(101)飞往被定义为其家乡位置的位置。此类特征可以由uav(101)基于来自控制器(102)的简单命令来执行(如:按下单个按钮)或在失去来自控制器(102)的数据链路(103)或其它有意义的控制输入超时的情况下执行。
20.作为另一个最近发展,uav(101)还可以包括一个或多个摄像头(109)。在一些情况下,uav(101)可以包括作为摄像头(109)中的一个的万向节安装摄像头,并且可以用于记录质量足以满足uav的用户的图片和视频——如今,通常呈高清晰度tv分辨率。在一些情况下,uav(101)可以包括通常覆盖一些或全部运动轴的其它摄像头(110),并且uav(101)可以被配置为基于来自摄像头(110)的信号来执行机载信号处理,以避免与固定和运动物体的碰撞。
21.在一些情况下,uav(101)可以包括作为摄像头(109)中的一个的“主”摄像头,并且其摄像头信号可以由uav(101)的通信接口(例如,通信电路)经由数据链路(111)向人类用户实时地传送,并且显示在包括在控制器(102)中、附接到控制器(102)或与控制器(102)分离的显示设备(112)上。数据链路(111)可以与数据链路(103)相同或不同。因此,使用称为“第一人称视角”(fpv)的技术,uav可以成功地飞出人类飞行员的视线。
22.参考图2,uas(200)可以包括uav(201)和控制器(202)。uav(201)和控制器(202)可以与图1中分别图示的uav(101)和控制器(102)相同或类似。uas可以与uas服务供应商(uss)(204)或uas业务管理(utm)交换数据业务。根据实施例,可能由人类飞行员(203)操作的uas(200)可以被配置为实时地通知一个或多个uss(204)关于uav(201)的位置。可以使用因特网(205)进行报告。对于除了涉及系留式uav的最特殊的使用情况之外的所有情况,这可以意味着uav(201)和uas(200)的控制器(202)中的一者或两者可以被配置为具有通过诸如网络(207)的无线网络(例如5g网络)到因特网(205)的连接(206),并且uss(204)还可以具有到因特网(205)的连接(208)。本文可以假定此类场景,但是本公开的实施例不限于此。也可以使用除因特网(205)之外的网络。例如,可以想到,可以使用不是因特网的封闭无线网络来在uas(200)与uss(204)之间进行通信。封闭无线网络可以用于某些军用uav。当此后提到“因特网”时,意味着包括此类网络。
23.在使连接(206)(例如,无线连接)和网络(207)(例如,无线网络)能够将诸如uas(200)的控制器(202)或uav(201)的系统连接到因特网(205)的使用中可以部署许多物理无线网络技术。对于户外应用,可以使用移动网络,诸如例如第五代或“5g”网络。此后,可以假定使用此类5g网络,但是本公开的实施例不限于此。同样可以采用其它物理网络技术,包括例如3g、3.5g、4g、lte移动网络、基础结构或特别模式中的无线lan、zig-bee等。在本公开的实施例中,承载因特网的移动网络可以提供诸如例如uas(200)与uss(204)之间的双向通信。然而,在每个方向上的服务质量可能不同。根据本公开的实施例,uav(201)、控制器(202)和/或uss(204)可以包括通信接口(包括例如发射器和/或接收器)和至少一个具有实施一种或多种物理无线网络技术的存储器的处理器,以便被配置为经由本公开的一种或多种网络类型进行通信。
24.参考图2,因特网(205)到uav(201)和/或控制器(202)之间通过网络(207)(例如,5g网络)的连接(206)可以是双向的。当使用诸如因特网协议(ip)、传输控制协议(tcp)、用户数据报协议(udp)、超文本传送协议(http)、快速udp因特网连接(quic)以及类似的因特网协议用于uas(200)与uss(204)之间的通信时,那么根据此类协议的性质,这些协议可能需要双向链路来工作。
25.参考图3至图4,在本公开的实施例中,可以提供系统。该系统可以包括一起构成uas(300)的uav(301)和控制器(302)。uav(301)和控制器(302)可以包括关于图1至图2中所
图示的uas(100)和uas(200)描述的任意数量的硬件(例如摄像头和通信接口)和软件部件,并且可以被配置为执行关于uas(100)和uas(200)描述的功能。根据实施例,参考图3,该uav(301)可以包括计算机系统(320),该计算机系统(320)包括至少一个处理器和存储计算机代码的存储器,其中该计算机代码被配置为在由该uav(301)的至少一个处理器执行时使该uav(301)执行其功能。计算机系统(320)可以由稍后参考图9描述的计算机系统(900)的任何数量的部件来实施,并且可以排除图9中所图示的大多数用户界面部件。计算机系统(320)可以是嵌入式系统,并且可以有利地(出于空间和权重的原因)是uav(301)的机载飞行控制电路的一部分或集成到uav(301)的机载飞行控制电路。计算机系统(320)可以具有获得其在三维空间中的位置的机制。例如,计算机系统(320)可以包括gps天线(323),该gps天线(323)与gps接收器一起可以是此类机制的一个示例。计算机系统(320)可以包括其它机制,诸如例如gps与(可能更精确的)气压高度传感器的组合、从基于地面的导航工具(全向范围导航系统(vor)、蜂窝电话塔等)确定横向位置的三角测量机制等。uav(301)还可以包括可由uav(301)的用户(309)访问的存储器存储装置(324)。例如,如图3所图示的,存储器存储装置(324)可以是微型sd卡。然而,存储器存储装置(324)也可以是另一可改变的半导体存储装置、uav(301)中的可通过网络插头从计算机或无线lan访问的机载nv-ram等。
26.控制器(302)还可以包括计算机系统,该计算机系统包括至少一个处理器和存储计算机代码的存储器,其中该计算机代码被配置为在由该控制器(302)的至少一个处理器执行时使该控制器(302)执行其功能。控制器(302)的计算机系统可以由稍后参考图9描述的计算机系统(900)的任何数量的部件来实施。参考图4,控制器(302)可以包括可由控制器(302)的用户(309)访问的存储器(334)。存储器(334)可以具有与存储器(324)相同或类似的配置。根据实施例,在uas(300)中可以包括存储器(324)和存储器(334)中的一个、不包括存储器(324)和存储器(334)或包括存储器(324)和存储器(334)两者。存储器(324)和/或存储器(334)可以具有至少足够的大小来存储与该uav可以在其中操作的一个或多个空域有关的信息。
27.用于uas(300)(例如,uav(301)或控制器(302))与一个或多个服务器(304)(例如uss)之间的通信的协议的细节可以取决于由一个或多个服务器(304)提供的服务。
28.最近,包括faa的空域管理机构已经实施了现代查询界面,该现代查询界面允许自动下载与特定位置相关的信息,该特定位置具有比州更精细的粒度。这些界面可以基于restful操作。表述性状态转移(rest)是一种技术,其中客户端可以通过标准http方法(包括例如,get、post、put、patch或delete)以定义的格式查询由基本统一资源标识符(uri)标识的服务器。一种此类定义的标准化格式被称为java对象简谱(json)。
29.参考图3,uav(301)的计算机系统(320)可以包括通信接口,该通信接口包括例如一个或多个诸如通信器(325)的通信器,该通信器可以包括例如5g天线。通信器(325)可以被配置为通过使用网络(307)向因特网(305)发送数据和从因特网(305)接收数据(例如,关于空域的信息)。通信器(325),或uav(301)的通信接口的另一通信器,可以被配置为经由无线连接(310)向控制器(302)发送数据(例如,传感器数据、视频数据、关于一个或多个空域的信息)和从控制器(302)接收数据(例如,命令数据)。控制器(302)还可以具有带有通信器的通信接口,该通信器被配置为经由无线连接(310)向uav(301)发送数据(例如命令)和从uav(301)接收数据(例如传感器数据、视频数据、关于一个或多个空域的信息)。参考图4,控
制器(302)的通信器(315)或控制器(302)的通信接口的另一通信器可以被配置为通过使用网络(307)向因特网(305)发送数据和从因特网(305)接收数据(例如,关于一个或多个空域的信息)。本公开的每个通信器可以包括例如发射器和接收器。
30.在第三代合作伙伴项目(3gpp)5g无线架构中,可以存在垂直的服务使能架构层(seal),其提供程序、信息流和api以支持3gpp系统上的垂直应用。为了确保3gpp系统上垂直应用的有效使用和部署,seal服务可以包括但不限于组管理、配置管理、位置管理、身份管理、密钥管理和网络资源管理。
31.参考图5,下面描述uas的示例seal通用架构。
32.seal通用架构可以包括,例如,用户设备(ue)(511)(例如uas)、3gpp网络(509)、uas应用使能器(uae)服务器(402)和一个或多个seal服务器(507)。一个或多个ue(511)可以包括,例如,一个或多个uae客户端(501)和一个或多个seal客户端(504)。在实施例中,uae客户端(501)和seal客户端(506)可以在ue(511)之外或不包括在ue(511)中。
33.uas应用使能器(uae)层向uas特定应用层提供uae能力。uae层可以包括uae客户端(501)和uae服务器(503)。uae客户端和uae服务器使用参考点(502)通过3gpp网络彼此通信。uae客户端(501)可以提供uae客户端侧功能,并且可以支持在参考点(510)上与一个或多个seal客户端(504)的交互。uae服务器(503)可以提供uae服务器侧功能,并且可以支持在参考点(508)上与一个或多个seal服务器(507)的交互。
34.一个或多个seal客户端(504)可以提供对应于特定seal服务的客户端侧功能,并且一个或多个seal客户端(504)可以支持与一个或多个uae客户端(501)的交互,并且还可以支持两个ue(511)之间与对应的seal客户端(504)的交互。一个或多个seal服务器(507)可以提供对应于特定seal服务的服务器侧功能,可以支持与一个或多个uae服务器(503)的交互,并且还可以支持在分布式seal部署中与对应的seal服务器(507)的交互。
35.一个或多个seal客户端(504)可以在参考点(505)上通过3gpp网络与一个或多个seal服务器(507)通信。参考点(505)可以支持单播和多播递送模式。一个或多个seal客户端(501)可以在参考点(510)上向一个或多个uae客户端(501)提供服务使能层支持功能。一个或多个uae服务器(503)可以在参考点(508)上与一个或多个seal服务器(507)通信。一个或多个seal服务器(507)可以使用由3gpp网络系统指定的相应3gpp接口(506)与底层3gpp核心网络系统通信。
36.可以在参考点(502)上提供与uae客户端(501)与垂直应用层(val)服务器之间的垂直应用层支持功能相关的交互。val服务器可以是uae服务器(503)的一部分或与uae服务器(503)一起提供。可以在参考点(505)上提供seal客户端(504)与对应的seal服务器(507)之间的交互。参考点(505)可以是特定的seal服务(诸如网络资源管理)参考点,该参考点可以在特定的seal服务功能模型中指定。
37.可以提供在参考点(506)上与3gpp策略和计费规则功能(pcrf)通信的网络资源管理(nrm)服务器。nrm服务器(nrm-s)可以经由参考点(506)与3gpp 5g策略控制功能(pcf)通信,以控制来自底层3gpp网络(509)的单播资源。nrm服务器可以是seal服务器(507)的一部分、与seal服务器(507)一起提供、由seal服务器(507)实施或包括在seal服务器(507)中,并且pcrf和pcf可以包括在3gpp网络(509)中。在实施例中,位置管理服务器(lms)可以是seal服务器(507)的一部分、与seal服务器(507)一起提供、由seal服务器(507)实施或包括
在seal服务器(507)中。
38.seal客户端504可以包括多个特征,例如网络资源管理(nrm)。nrm客户端(nrm-c)可以部署在ue 511侧,例如seal客户端50的一部分、与seal客户端50一起提供、由seal客户端50实施或包括在seal客户端50中,以与nrm服务器通信,用于网络资源或状况检测和报告。位置管理客户端(lmc)可以部署在ue 511侧,例如seal客户端504的一部分、与seal客户端504一起提供,由seal客户端504实施或包括在seal客户端504中,以与用于ue位置报告和检测(monitor)的lms通信。
39.在seal客户端504与seal服务器507之间的通信,例如在nrm-c与nrm-s之间,或在lmc与lms之间,可以发生在uae服务器503与seal服务器507之间。例如,如果uae服务器503想要知道当前的网络连接状态,uae服务器503可以向包括在seal服务器507中的nrm服务器发送询问,并且nrm服务器又可以与包括在seal客户端504中的nrm客户端通信以获取报告。
40.在实施例中,与网络连接的uav,例如上面讨论的uav 101、uav 201或uav 301,可能在uav操作的任何阶段丢失网络通信。当通信丢失时,uss/utm和3gpp网络都不能精准确定uav的位置。因此,重要的是能够接近实时地知道网络状况以避免任何服务延迟。
41.因此,实施例可以涉及一种实时uav连接检测(monitor)和位置报告机制,该机制不仅可以使uae服务器能够主动地检测uav网络连接,而且还提供其它优点,诸如精确的位置报告和网络收敛检测。
42.如上所述,在uav操作的任何阶段,uav可能失去与其所连接的网络(诸如3gpp 5g)的通信。当通信丢失时,uss/utm和3gpp网络都不能精准确定uav的位置。因此,重要的是能够接近实时地知道网络状况以避免任何服务延迟。
43.实施例可以使用现有的seal功能来提供实时uav连接检测和位置报告工作流600,该现有的seal功能可以提供额外的以下功能:-与uav的3gpp网络连接的实时检测-当发生与uav失去通信时的报告-失去通信后提供最后已知位置-沿着uav的飞行路径报告3gpp网络覆盖
44.参考图6,工作流600可以涉及uav 601、lmc 602、nrm-c/s 603、uae服务器604和lms 605。在实施例中,uav 601可以对应于上面讨论的uav 101、uav 201或uav 301中的一个或多个。在实施例中,uae服务器604可以对应于上面讨论的uae 503。在实施例中,nrm-c/s 603可以包括上面讨论的nrm-c和nrm-s中的一个或多个。在实施例中,lmc 602可以对应于上面讨论的lmc,并且lms 605可以对应于上面讨论的lms。在实施例中,nrm-c、nrm-s、nrm-c/s 603、lmc 602和lms 605中的一个或多个可以是seal客户端504和seal服务器(507)中的一个或多个的一部分、与seal客户端504和seal服务器(507)中的一个或多个一起提供、由seal客户端504和seal服务器(507)中的一个或多个实施或包括在seal客户端504和seal服务器(507)中的一个或多个中。
45.在实施例中,uav 601可以建立与3gpp网络的连接,并且为所连接的uav部署seal网络资源管理和定位服务。
46.uae服务器604可以通过周期性地从nrm-c/s 603拉取(步骤612)3gpp网络信号接收质量报告来提供主动网络连接检测(步骤611)。在简单的请求过程中,nrm-s可以向nrm-c
发送网络请求,并且由nrm-c发送回的报告可以包括“单播”或“多播”网络状态,其可以用于指示网络信号质量。
47.主动拉取的频率可以是实施独立的。例如,高频可能意味着高功率消耗,但是提供接近实时的检测。
48.当连接状态处于up状态时,uae服务器(604)可以向lms(605)触发(步骤613)位置更新请求。lms(605)可以检查位置管理客户端(602)或uae服务器(604)是否被授权发送位置报告触发器。根据由位置报告触发器指定的信息,lms(605)为lmc(602)的位置启动按需位置报告程序或事件触发的位置报告程序。在实施例中,从lms(605)向lmc(602)发送位置请求(步骤614),并且从lmc(602)向lms(605)发送位置响应(步骤615)。
49.uae服务器(604)可以按服务请求发出位置询问。uae服务器(604)向lms(605)发送位置信息请求(步骤616)。lms(605)可以通过触发如上所描述的按需位置报告程序来获取被请求的uav的最新位置。然后,lms可以立即发送包括所获取的uav(601)的最新位置信息的位置信息报告(步骤617)。
50.如果nrm-s可以基于来自nrm-c的接收质量报告检测到存在失去通信(步骤618)。nrm-s可以向uae服务器(604)指示uav 601不可用,例如通过报告丢失连接(步骤619)。
51.随着失去通信链路,lms(605)仍可以向uae服务器(604)提供最后已知位置(步骤620)。步骤620可以与上述用于位置询问的工作流相同。
52.如果nrm-s检测到通信恢复(步骤621),则nrm-s向uae服务器(604)指示uav 601已经变得可用,例如通过报告连接恢复(步骤622)。
53.一旦uae服务器604接收到关于连接恢复的通知,它可以再次触发对lms(605)的位置更新请求(步骤623)。该位置请求和更新过程(步骤623至步骤625)可以类似于上面讨论的步骤613至步骤615。
54.因此,实施例可以涉及一种提供实时uav连接检测和位置报告机制的方法,该方法使uae服务器能够主动地检测uav网络连接,从而提供其它优点,诸如精确的位置报告和网络收敛检测。
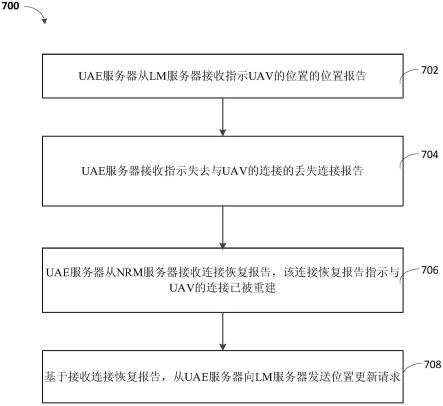
55.图7是图示用于无人机(uav)连接检测和位置报告的示例过程700的流程图。可以借助于图1至图6描述图7。在实施例中,过程700的一个或多个块可以以任何顺序组合。
56.如图7所示,过程700可以包括由无人机系统应用使能器(uae)服务器从位置管理(lm)服务器接收指示uav的位置的位置报告(块702)。在实施例中,uae服务器可以对应于上面讨论的uae服务器503和uae服务器604中的一个或多个。在实施例中,uav可以对应于上面讨论的uav 101、uav 201、uav 301或uav 601中的一个或多个。在实施例中,lm服务器可以对应于上面讨论的lms 605。
57.如图7进一步所示,过程700可以包括由uae服务器接收指示失去与uav的连接的丢失连接报告(块704)。
58.如图7进一步所示,过程700可以包括由uae服务器从网络资源管理(nrm)服务器接收连接恢复报告,该连接恢复报告指示与uav的连接已被重建(块704)。在实施例中,nrm服务器可以对应于上面讨论的nrm-s或nrm-c/s 603中的一个或多个。
59.如图7进一步所示,过程700可以包括基于接收连接恢复报告,从uae服务器向lm服务器发送位置更新请求(块704)。
60.在实施例中,位置更新请求使lm服务器向对应于uav的lm客户端发送位置请求。在实施例中,lm客户端可以对应于上面讨论的lmc 602。
61.在实施例中,可以从nrm服务器接收丢失连接报告。
62.在实施例中,nrm服务器可以基于由nrm服务器从与uav相关联的nrm客户端接收的接收质量报告来发送丢失连接报告。在实施例中,nrm客户端可以对应于上面讨论的nrm-c或nrm-c/s 603中的一个或多个。
63.在实施例中,可以基于从uae服务器向lm服务器发送的位置请求来接收位置报告。
64.在实施例中,可以基于由uae服务器从nrm服务器接收的网络连接状态报告,从uae服务器发送位置请求。
65.在实施例中,在接收丢失连接报告之后,uae服务器可以进一步从lm服务器接收指示uav的最后已知位置的信息。
66.可以理解的是,图7仅提供了实施方案的说明,并不意味着对关于可以如何实施不同实施例的任何限制。可以基于设计和实施方案要求对所描绘的环境进行许多修改。
67.本公开的系统可以包括至少一个处理器和存储计算机代码的存储器。当由至少一个处理器执行时,该计算机代码可以被配置为使至少一个处理器执行本公开的实施例的功能。例如,本公开的uav和uav控制器可以各自包括各自的至少一个处理器和存储计算机代码的存储器,该计算机代码被配置为使uav和uav控制器执行它们各自的功能。此外,本公开的服务器(例如uae服务器(604)、lms(605)、nrm-s等)可以由相同或不同的至少一个处理器和/或相同或不同的存储计算机代码的存储器来实施。
68.下面参考图8描述实施uae服务器(604)的计算机代码的示例。计算机代码可以包括例如第一接收代码(802)、第二接收代码(804)、第三接收代码(806)和确定代码(808)。
69.第一接收代码(802)可以被配置为使uae服务器(604)从位置管理(lm)服务器接收指示无人机(uav)的位置的位置报告。在实施例中,uav可以对应于上面讨论的uav 101、uav 201、uav 301或uav 601中的一个或多个。在实施例中,lm服务器可以对应于上面讨论的lms 605。在实施例中,lm服务器可以对应于上面讨论的lms 605。
70.第二接收代码(804)可以被配置为使uae服务器(604)接收指示失去与uav的连接的丢失连接报告。
71.第三接收代码(806)可以被配置为使uae服务器(604)从网络资源管理(nrm)服务器接收连接恢复报告,该连接恢复报告指示与uav的连接已被重建。在实施例中,nrm服务器可以对应于上面讨论的nrm-s或nrm-c/s 603中的一个或多个。
72.发送代码(808)可以被配置为基于接收连接恢复报告而使uae服务器(604)向lm服务器发送位置更新请求。
73.虽然上面描述了由uae服务器(604)执行的示例代码,但是本领域普通技术人员应当理解,本公开的uav、uav、uav控制器和服务器中的每一个可以包括计算机代码和/或由计算机代码实施,该计算机代码被配置为使uav、uav控制器和服务器执行它们各自的功能,包括本公开中描述的功能。
74.上面描述的用于无人机系统通信的技术可以在控制器和uav中被实施为使用计算机可读指令并且物理存储在一个或多个计算机可读介质中的计算机软件。例如,图9示出了图示的合适于实施所公开的主题的某些实施例的计算机系统(900)。
75.计算机软件可以使用任何合适的机器代码或计算机语言进行编码,该机器代码或计算机语言可以经受汇编、编译、链接或类似机制来创建包括可以由计算机中央处理单元(cpu)、图形处理单元(gpu)等直接或通过解释、微代码执行等执行的指令的代码。
76.指令可以在各种类型的计算机或其部件上执行,包括例如个人计算机、平板计算机、服务器、智能电话、游戏设备、物联网设备等。
77.图9所示的用于计算机系统(900)的部件本质上是示例性的,并且不旨在对实施本公开的实施例的计算机软件的使用范围或功能性提出任何限制。部件的配置也不应被解释为对计算机系统900的示例性实施例中所图示的任何一个部件或其部件组合具有任何依赖性或要求。
78.计算机系统(900)可以包括某些人机接口输入设备。此类人机接口输入设备可以响应于一个或多个人类用户通过例如触觉输入(诸如:击键、滑动、数据手套移动)、音频输入(诸如:语音、拍打)、视觉输入(诸如:手势)、嗅觉输入(未示出)的输入。人机接口设备还可以用于捕获不一定与人的有意识输入直接相关的某些介质,诸如音频(诸如:语音、音乐、环境声音)、图像(诸如:扫描图像、从静止图像摄像头获得的摄影图像)、视频(诸如二维视频、包括立体视频的三维视频)。
79.输入人机接口设备可以包括以下中的一个或多个(每种仅描绘了一个):键盘(901)、鼠标(902)、触控板(903)、触摸屏(910)、操纵杆(905)、麦克风(906)、扫描仪(907)和摄像头(908)。
80.计算机系统(900)还可以包括某些人机接口输出设备。此类人机接口输出设备可以通过例如触觉输出、声音、光和嗅觉/味觉来刺激一个或多个人类用户的感觉。此类人机接口输出设备可以包括触觉输出设备,例如通过触摸屏(910)、数据手套或操纵杆(905)的触觉反馈,但是也可以存在不用作输入设备的触觉反馈设备。例如,此类设备可以是音频输出设备(诸如:扬声器(909)、耳机(未描绘))、视觉输出设备(诸如屏幕910以包括crt屏幕、lcd屏幕、等离子屏幕、oled屏幕,其各自具有或不具有触摸屏输入能力,各自具有或不具有触觉反馈能力—其中一些能够通过诸如立体输出的方式输出二维视觉输出或多于三维输出;虚拟现实眼镜(未描绘)、全息显示器和烟雾罐(未描绘)),以及打印机(未描绘)。
81.计算机系统(900)还可以包括人类可访问的存储设备及其相关联的介质,诸如包括具有cd/dvd的cd/dvd rom/rw(920)等介质(921)的光学介质、拇指驱动器(922)、可移动硬盘驱动器或固态驱动器(923)、诸如磁带和软盘(未描绘)的传统磁性介质、诸如安全软件狗(未描绘)的基于专用rom/asic/pld的设备等。
82.本领域技术人员还应当理解,结合当前公开的主题使用的术语“计算机可读介质”不包括传输介质、载波或其它易失性信号。
83.计算机系统(900)还可以包括到一个或多个通信网络的接口。网络例如可以是无线的、有线的、光学的。网络还可以是本地的、广域的、城域的、车辆的和工业的、实时的、延迟容许型的等。网络的示例包括诸如以太网的局域网、无线lan、包括gsm、3g、4g、5g、lte等的蜂窝网络、包括有线tv、卫星tv和地面广播tv的tv有线或无线广域网、包括canbus的车辆的和工业的网络等。某些网络通常需要附接到某些通用数据端口或外围总线(949)的外部网络接口适配器(例如,计算机系统(900)的usb端口;其它网络通常通过附接到如下所述的系统总线而集成到计算机系统(900)的核心中(例如以太网接口到pc计算机系统中或蜂窝
网络接口到智能电话计算机系统中)。使用这些网络中的任何一个,计算机系统(900)可以与其它实体进行通信。此类通信可以是单向的仅接收(例如,广播tv)、单向的仅发送(例如,canbus到某些canbus设备),或双向的,例如到使用局域或广域数字网络的其它计算机系统。此类通信可以包括到云计算环境(955)的通信。可以在如上所描述的那些网络和网络接口中的每一个上使用某些协议和协议栈。
84.上述人机接口设备、人类可访问的存储设备和网络接口(954)可以附接到计算机系统(900)的核心(940)。
85.核心(940)可以包括一个或多个中央处理单元(cpu)(941)、图形处理单元(gpu)(942)、现场可编程门阵列(fpga)(943)形式的专用可编程处理单元、用于某些任务的硬件加速器(944)等。这些设备连同只读存储器(rom)(945)、随机存取存储器(ram)(946)、诸如内部非用户可访问硬盘驱动器、ssd等的内部大容量存储装置可以通过系统总线(948)连接。在一些计算机系统中,系统总线(948)可以以一个或多个物理插头的形式访问,以使得能够通过附加cpu、gpu等进行扩展。外围设备可以直接或通过外围总线(949)附接到核心的系统总线(948)。外围总线的架构包括pci、usb等。图形适配器(950)可以被包括在核心(940)中。
86.cpu(941)、gpu(942)、fpga(943)和加速器(944)可以执行某些指令,这些指令的组合可以构成上述计算机代码。该计算机代码可以存储在rom(945)或ram(946)中。过渡数据也可以存储在ram(946)中,而永久数据可以存储在例如内部的大容量存储装置(947)中。可以通过使用高速缓存存储器来启用对任何存储器设备的快速存储和检索,高速缓存存储器可以与一个或多个cpu(941)、gpu(942)、大容量存储装置(947)、rom(945)、ram(946)等紧密相关联。
87.计算机可读介质可以在其上具有用于执行各种计算机实施的操作的计算机代码。介质和计算机代码可以是为了本公开的目的而专门设计和构建的那些,或者它们可以是计算机软件领域的技术人员公知和可用的类型。
88.作为示例而非限制,具有架构的计算机系统(900),特别是核心(940)可以提供作为一个或多个处理器(包括cpu、gpu、fpga、加速器等)执行体现在一个或多个有形的计算机可读介质中的软件的结果的功能性。此类计算机可读介质可以是与如上所介绍的用户可访问的大容量存储装置相关联的介质,以及具有非易失性性质的核心(940)的某些存储装置,诸如核心内部大容量存储装置(947)或rom(945)。实施本公开的各种实施例的软件可以存储在此类设备中并且由核心(940)执行。根据特定需要,计算机可读介质可以包括一个或多个存储器设备或芯片。软件可以使核心(940)并且特别是其中的处理器(包括cpu、gpu、fpga等)执行本文描述的特定过程或特定过程的特定部分,包括定义存储在ram(946)中的数据结构并且根据由软件定义的过程修改此类数据结构。另外或作为替代,计算机系统可以提供作为逻辑硬连线的结果或以其它方式体现在电路(例如:加速器(944))中的功能性,其可以代替软件或与软件一起操作以执行本文描述的特定过程或特定过程的特定部分。在适当的情况下,对软件的引用可以包括逻辑,反之亦然。在适当的情况下,对计算机可读介质的引用可以包括存储用于执行的软件的电路(诸如集成电路(ic))、体现用于执行的逻辑的电路,或两者。本公开包括硬件和软件的任何合适的组合。
89.虽然本公开已经描述了若干非限制性示例实施例,但是存在属于本公开的范围内
的改变、变换和各种替代等同物。因此应当理解,本领域技术人员将能够设计许多系统和方法,这些系统和方法虽然未在本文中明确示出或描述,但体现本公开的原理,并且因此在本公开的精神和范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。