1.本技术涉及摇摆台技术领域,特别涉及一种高可靠性摇摆台。
背景技术:
2.海上漂浮式激光雷达广泛应用,对该类产品的测量精度标定目前有两种方案:其一是在海上修建标准测风塔,并将漂浮式测风激光雷达布置在附近,进行比对测试;其二是在陆地上建设标准测风塔,使用摇摆台系统搭载漂浮式激光雷达系统,模拟海上的摇摆、旋转环境,进行比对测试。由于海上修建测风塔造价高昂,且漂浮式雷达系统在海上下锚进行比对,测试开销也极高,故在陆地上使用摇摆台模拟海上摇摆环境进行测试比对的方案优势大。
3.目前的摇摆模拟系统一般为实验室使用,价格昂贵,在测风激光雷达的比对实验当中,测量时间一般至少为几周至几个月,而且需要在符合测风比对要求的户外场地中进行。此类实验室产品很难连续在户外不间断工作如此长时间。
4.请参考图2,图2为现有技术中第一种摇摆台的结构示意图,从结构可以看出,由于三轴完全独立,在结构上属于串联结构。中间的轴需要负载最靠近负载的轴系结构,外加负载的重量,最外面的轴需要负载中间和最靠近负载的两个轴的轴系结构,外加负载重量。这导致大负载,高精度的三轴摇摆台造价高昂,难度很大。
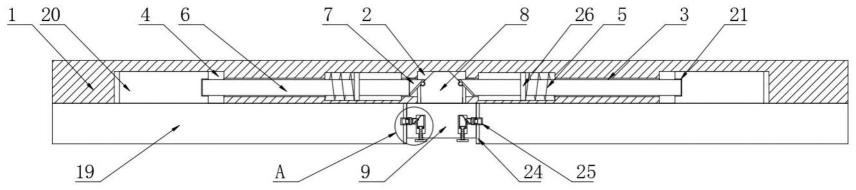
5.请参考图3,图3为现有技术中第二种摇摆台的结构示意图,该类结构防护性较差,油缸结构难以长时间在户外淋雨,且长时间运行,油缸会由于渗油、温度变化影响等因素导致到位能力变差,严重时会导致结构产生内应力,造成结构损坏。且该结构所有重量由执行油缸承载,油缸的承载能力限制了整个系统的负载能力。该类方案也无法解决航向轴连续旋转的问题,这种结构只能在小幅度进行航向旋转(一般为60-90度左右),如希望连续旋转,还需要再增加转台结构。
6.因此,如何能够提供一种解决上述技术问题的高可靠性摇摆台是本领域技术人员亟需解决的技术问题。
技术实现要素:
7.本技术的目的是提供一种高可靠性摇摆台,使用倾斜结构件与组件回转机构组合,能够实现不同倾斜角度的摇摆模拟,结构简单,防护性强,倾斜角度精准,角度反馈实时性强,可长时间连续工作。
8.为实现上述目的,本技术提供一种高可靠性摇摆台,包括负载平台和支撑架,还包括回转组件,所述回转组件安装于所述支撑架且与所述负载平台相连,所述回转组件通过自身的回转改变所述负载平台相对所述支撑架的倾斜角度;所述回转组件包括倾斜结构件和组件回转机构,所述组件回转机构用于驱动所述倾斜结构件回转,所述倾斜结构件具有在所述倾斜结构件的驱动下回转的倾斜面,以实现利用所述倾斜面的回转实现所述负载平台相对所述支撑架倾斜角度的改变。
9.在一些实施例中,所述负载平台包括承载板和承载回转机构,所述承载回转机构安装于所述倾斜结构件且与所述承载板相连,所述承载回转机构可用于抵消所述组件回转机构的运动。
10.在一些实施例中,所述承载回转机构为承载回转减速机,所述承载回转减速机的外圈相对所述倾斜结构件固定,所述承载回转减速机的内圈相对所述承载板固定。
11.在一些实施例中,所述回转组件包括多组回转单元,所述回转单元包括所述倾斜结构件和所述组件回转机构,多组所述回转单元以串联的形式设置于所述负载平台和所述支撑架之间。
12.在一些实施例中,每组所述回转单元包括一个所述倾斜结构件和一个所述组件回转机构。
13.在一些实施例中,所述回转组件包括第一回转单元和第二回转单元,所述第一回转单元包括一个第一倾斜结构件和一个第一组件回转机构,所述第二回转单元包括一个第二倾斜结构件和一个第二组件回转机构,所述第二组件回转机构安装于所述支撑架且与所述第二倾斜结构件相连,所述第一组件回转机构安装于所述第二倾斜结构件且与所述第一倾斜结构件相连。
14.在一些实施例中,所述第一组件回转机构为第一回转减速机,所述第二组件回转机构为第二回转减速机,所述第二回转减速机的外圈相对所述支撑架固定,所述第二回转减速机的内圈相对所述第二倾斜结构件固定,所述第一回转减速机的外圈相对所述第二倾斜结构件固定,所述第一回转减速机的内圈相对所述第一倾斜结构件固定。
15.在一些实施例中,所述第一回转单元和所述第二回转单元的结构相同,所述第一回转单元和所述第二回转单元的倾斜角度为a,所述高可靠性摇摆台的倾斜角度调节范围为{a|-2a≤a≤2a}。
16.在一些实施例中,所述倾斜结构件和所述组件回转机构均为中空结构,在所述倾斜结构件和所述组件回转机构的中间形成提供电力及控制信号的通路。
17.在一些实施例中,所述负载平台设置有减重孔,且在所述负载平台无倾斜时,所述负载平台的对称中心位于所述回转组件的旋转轴线上。
18.相对于上述背景技术,本技术所提供的高可靠性摇摆台包括负载平台、支撑架和回转组件,回转组件安装于支撑架,回转组件与负载平台相连;其中,回转组件包括倾斜结构件和组件回转机构,组件回转机构用于驱动倾斜结构件回转,倾斜结构件具有在倾斜结构件的驱动下回转的倾斜面。
19.在该高可靠性摇摆台的工作过程中,回转组件能够通过自身的回转改变负载平台相对支撑架的倾斜角度,即利用倾斜面的回转实现负载平台相对支撑架倾斜角度的改变。该高可靠性摇摆台使用倾斜结构件与组件回转机构组合,能够实现不同倾斜角度的摇摆模拟,结构简单,防护性强,倾斜角度精准,角度反馈实时性强,可长时间连续工作。
附图说明
20.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据
提供的附图获得其他的附图。
21.图1为本技术实施例提供的高可靠性摇摆台的结构示意图;图2为现有技术中第一种摇摆台的结构示意图;图3为现有技术中第二种摇摆台的结构示意图;图4为本技术实施例提供的倾斜结构件的原理示意图一;图5为本技术实施例提供的倾斜结构件的原理示意图二;图6为本技术实施例提供的高可靠性摇摆台的状态示意图一;图7为本技术实施例提供的高可靠性摇摆台的状态示意图二;图8为本技术实施例提供的高可靠性摇摆台的状态示意图三;图9为本技术实施例提供的倾斜结构件的结构示意图;图10为本技术实施例提供的组件回转机构的结构示意图。
22.其中:1-负载平台、2-支撑架、3-回转组件;301-倾斜结构件、302-组件回转机构;11-承载板、12-承载回转减速机、31-第一回转单元、32-第二回转单元、311-第一倾斜结构件、312-第一回转减速机、321-第二倾斜结构件、322-第二回转减速机、3011-第一安装部、3012-第二安装部、3021-外圈、3022-内圈。
具体实施方式
23.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
24.为了使本技术领域的技术人员更好地理解本技术方案,下面结合附图和具体实施方式对本技术作进一步的详细说明。
25.请参考图1和图6,图1为本技术实施例提供的高可靠性摇摆台的结构示意图,图6为本技术实施例提供的高可靠性摇摆台的状态示意图一。
26.在第一种具体的实施方式中,本技术提供了一种高可靠性摇摆台,该高可靠性摇摆台主要包括负载平台1、支撑架2和回转组件3,回转组件3安装于支撑架2,回转组件3与负载平台1相连。
27.其中,回转组件3包括倾斜结构件301和组件回转机构302,组件回转机构302用于驱动倾斜结构件301回转,倾斜结构件301具有在倾斜结构件301的驱动下回转的倾斜面。
28.在该高可靠性摇摆台的工作过程中,回转组件3能够通过自身的回转,来改变负载平台1相对支撑架2的倾斜角度;即利用倾斜结构件301在组件回转机构302作用下的倾斜面的回转,来实现负载平台1相对支撑架2倾斜角度的改变;以此实现对负载平台1及其上结构的摇摆模拟。
29.请结合图2和图3与本技术对比,可以理解的是,图2中,中间的轴需要负载最靠近负载的轴系结构,外加负载的重量,最外面的轴需要负载中间和最靠近负载的两个轴的轴系结构。图3中,六自由度摇摆台使用6根(或更多)直线电机/油缸,通过控制各油缸的伸缩
长度,可控制顶部平台以六个自由度运动(x轴平移/x轴旋转/y轴平移/y轴旋转/z轴平移/z轴旋转)。
30.目前在地面使用的摇摆台一般使用六自由度摇摆台进行测试。但该系统价格较高,且大部分结构防护性较弱,难以全天候长时间在户外运行,并且单独的六轴摇摆台还无法完成连续旋转的功能,除非再额外增加转台系统。
31.与图2和图3不同的是,请参考图4和图5,图4为本技术实施例提供的倾斜结构件的原理示意图一,图5为本技术实施例提供的倾斜结构件的原理示意图二,本技术提供的高可靠性摇摆台利用倾斜结构件301的倾斜面,使倾斜面在回转时实现摇摆模拟;在此基础上,该高可靠性摇摆台使用倾斜结构件301与组件回转机构302组合,能够实现不同倾斜角度的摇摆模拟,结构简单,防护性强,倾斜角度精准,角度反馈实时性强,可长时间连续工作。
32.需要注意的是,图4和图5仅是为了便于理解倾斜结构件301的原理所做出的示意图,只要能够实现使倾斜面在回转时实现摇摆模拟的效果即可,倾斜结构件301可以是任意数量、规格、形状,不应局限于图示中所限定的结构;因此,图示结构仅仅是为了便于说明的一种具体结构,对于其他与图有异的结构,在未做出创造性改变的前提下,同应属于本实施例的说明范围。
33.除此以外,实施例中的组件回转机构302至少是一种回转传动机构,以满足保障倾斜结构件301实现回转的基本要求;在此基础上,组件回转机构302还可以兼具配置动力源,进而实现对倾斜结构件301回转的动力驱动。需要注意的是,组件回转机构302的结构不应受到限制,可选用现有技术中合适的机构来实现上述功能,至于具体的结构、型号等,应结合实际情况在现有机构中进行选择,这里不再一一赘述。
34.在另一种具体的实施方式中,负载平台1包括承载板11和承载回转机构,承载回转机构安装于倾斜结构件301且与承载板11相连,承载回转机构可用于抵消组件回转机构302的运动。
35.在本实施例中,承载板11用于承载结构并为其提供摇摆模拟的功能;承载回转机构的结构和功能与组件回转机构302相似。
36.在使用时,摇摆的控制是由回转组件3的组件回转机构302来控制的,当希望仅做摇摆运动和不希望承载板11发生旋转时,在负载平台1增加了承载回转机构,此时组件回转机构302的旋转可由承载回转机构反向旋转而抵消,从而达到承载板11的航向(旋转)与回转组件3完全解耦的目的。
37.需要注意的是,实施例中的承载回转机构至少是一种回转传动机构,以满足保障承载板11实现回转的基本要求;在此基础上,承载回转机构还可以兼具配置动力源,进而实现对承载板11回转的动力驱动。需要注意的是,承载回转机构的结构不应受到限制,可选用现有技术中合适的机构来实现上述功能,至于具体的结构、型号等,应结合实际情况在现有机构中进行选择,这里不再一一赘述。
38.请参考图7,图7为本技术实施例提供的高可靠性摇摆台的状态示意图二。
39.示例性的,承载回转机构为承载回转减速机12,承载回转减速机12的外圈相对倾斜结构件301固定,承载回转减速机12的内圈相对承载板11固定。
40.需要说明的是,承载回转减速机12是一种回转式减速器,集成了驱动动力源的全周回转减速传动机构,它以回转支承作为传动从动件和机构附着件,通过在回转支承内外
圈中的一个圈上附着主动件、驱动源和罩壳,而把另一个圈既当作传动从动件,又作为被驱动工作部件的连接基座,这样利用回转支承本身就是全周回转连接件的特点,高效配置驱动动力源和主传动零件,使之成为一种集回转、减速和驱动功能于一体而同时又结构简单,制造和维护方便的通用型减速传动机构。
41.综上,该高可靠性摇摆台在利用倾斜面实现摇摆模拟的基础上,还利用额外的回转机构实现承载部分与摇摆部分的解耦,达到既能够模拟摇摆又能够避免旋转的目的。
42.在一些实施例中,回转组件3包括多组回转单元,回转单元包括倾斜结构件301和组件回转机构302,多组回转单元以串联的形式设置于负载平台1和支撑架2之间。
43.在本实施例中,回转组件3的摇摆模拟效果由多组回转单元结合实现,此时第一组回转单元的摇摆模拟效果会传递至第二组回转单元,第一组回转单元与第二组回转单元的摇摆模拟效果会传递至第三组回转单元,以此类推,负载平台1受到全部回转单元叠加的摇摆模拟效果。
44.在一些实施例中,每组回转单元包括一个倾斜结构件301和一个组件回转机构302。
45.在本实施例中,倾斜结构件301和组件回转机构302一一对应,每个倾斜结构件301均有与其对应的组件回转机构302来实现该倾斜结构件301的回转,此时摇摆的控制由全部组件回转机构302共同实现。
46.请参考图6至图8,图6为本技术实施例提供的高可靠性摇摆台的状态示意图一,图7为本技术实施例提供的高可靠性摇摆台的状态示意图二,图8为本技术实施例提供的高可靠性摇摆台的状态示意图三。
47.在一些实施例中,如图6所示,回转组件3共有两个回转单元,分别为第一回转单元31和第二回转单元32,此时回转组件3的摇摆模拟效果由第一回转单元31和第二回转单元32组合实现;如图7和图8所示,第一回转单元31包括一个第一倾斜结构件311和一个第一组件回转机构,第二回转单元32包括一个第二倾斜结构件321和一个第二组件回转机构,此时摇摆的控制由第一组件回转机构和第二组件回转机构共同实现。
48.在本实施例中,第一回转单元31位于上层,第二回转单元32位于下层,由下至上的,此时第二回转单元32中的第二组件回转机构安装于支撑架2,第二组件回转机构与第二倾斜结构件321相连,第一回转单元31中的第一组件回转机构安装于第二倾斜结构件321,第一组件回转机构与第一倾斜结构件311相连。
49.在一些实施例中,上述组件回转机构与承载回转机构相似的是,同样采用为回转式减速器,此时第一组件回转机构为第一回转减速机312,第二组件回转机构为第二回转减速机322。
50.在本实施例中,第二回转减速机322的外圈相对支撑架2固定,第二回转减速机322的内圈相对第二倾斜结构件321固定,第一回转减速机312的外圈相对第二倾斜结构件321固定,第一回转减速机312的内圈相对第一倾斜结构件311固定。
51.请参考图9和图10,图9为本技术实施例提供的倾斜结构件的结构示意图,图10为本技术实施例提供的组件回转机构的结构示意图。
52.更具体的,对于倾斜结构件301(如第一倾斜结构件311,第二倾斜结构件321),其具有第一安装部3011和第二安装部3012,以第二安装部3012处于水平面为例,第一安装部
3011相对第二安装部3012倾斜,此时倾斜结构件301的倾斜角度即为第一安装部3011相对第二安装部3012的倾斜角度;其中,第一安装部3011用于向上与另一回转单元的组件回转机构302连接,第二安装部3012用于向下与本回转单元的组件回转机构302连接。
53.对于组件回转机构302(如第一回转减速机312、第二回转减速机322),其具有外圈3021和内圈3022;其中,外圈3021用于向下与支撑架2或另一回转单元的倾斜结构件301的第一安装部3011连接,内圈3022用于向上与本回转单元的倾斜结构件301的第二安装部3012连接。
54.在一些实施例中,第一回转单元31和第二回转单元32的结构相同,也就是说,第一倾斜结构件311和第二倾斜结构件321的倾斜角度相同,第一回转单元31和第二回转单元32的倾斜角度为a,高可靠性摇摆台的倾斜角度调节范围为{a|-2a≤a≤2a}。
55.在本实施例中,该方案提出一种使用两个倾斜的倾斜结构件,倾斜结构件与回转减速机一一结合,即第一倾斜结构件311与第一回转减速机312结合,第二倾斜结构件321与第二回转减速机322结合;从而形成一种能够实现任意该斜面倾斜角度a的二倍角度的摇摆台系统,舍弃了六自由度摇摆台中对三轴平移的功能,较适合在漂浮式激光雷达系统地面模拟中使用。
56.需要解释的是,漂浮式测风激光雷达是一种将相干多普勒测风激光雷达搭载于浮标上,并且搭配高精度实时测姿系统,将浮体随海浪的摇摆进行实时矫正的海上浮动测风系统。在海上能否实时的矫正摇摆,矫正算法如何,是该类系统测风精度的关键。相干多普勒测风激光雷达是一种使用脉冲激光,测量大气中微小颗粒物运动速度的遥感型激光测风设备。小型设备的测量高度一般为几百米。测量时一般需要稳固固定,进行精确调平定位以确保测量精度。
57.示例性的,以倾斜角度a为8度为例,则该系统最大摇摆倾角为16度,可覆盖绝大部分海上摇摆环境。
58.需要注意的是,该倾角也可以按需调整以适应类似应用,目前在该应用当中,所模拟的浮标倾斜角度主要集中在15度以内,周期约5-20秒,摇摆方向各不相同,同时航向也会缓慢的大范围变化。
59.在本实施例中,结合图4和图5,可以理解的是,附图所示为两个具有8度倾斜的圆盘,其间有轴承结构可使其相对旋转。当两个倾斜方向完全相反时,倾斜相当于抵消,顶面处于水平状态,如图6;当倾斜方向相同时,倾斜角度完全叠加,顶面为16度倾斜角度,如图7和图8。通过控制两个盘旋转的相对位置,可控制顶面处于任何16度内的倾斜角度。
60.除此以外,摇摆台使用坚固耐用且负载能力强的回转蜗杆减速轴承结构,由闭环伺服电机驱动,可精确的控制上层的回转减速机及下层的回转减速机的旋转速度、位置,以实现精确控制摇摆的角度、方向、周期等特性,顶部回转减速机主要用于控制负载平台的航向。
61.在一些实施例中,倾斜结构件301和组件回转机构302均为中空结构,即各个倾斜结构件301和各种回转减速机均为中空结构,在中间容纳导电滑环,可以将电力及控制信号逐级上送至负载平台1位置,不受中间各级连续旋转的影响。还能给负载平台1的负载提供电力及控制信号的通路。
62.在一些实施例中,负载平台1设置有减重孔,且在负载平台1无倾斜时,负载平台1
的对称中心位于回转组件3的旋转轴线上。
63.在本实施例中,各种回转减速机是成熟的常用机械轴承结构,对轴向力、径向力、倾覆力均有很高的负载能力,性能稳定可靠,自身防护性就有ip66,可长时间在户外环境下使用。回转减速机内置蜗杆减速机,减速比可调,配合精度高,对驱动电机的扭矩要求大大降低。且负载的重量并不置于驱动源(电机)之上,而是由轴承结构支撑,电机断电也不影响支撑结构。电机做功仅用于负载姿态的改变,经济高效,适于长时间运行。
64.需要注意的是,本技术中提及的诸多部件均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
65.需要说明的是,在本说明书中,诸如第一和第二之类的关系术语仅仅用来将一个实体与另外几个实体区分开来,而不一定要求或者暗示这些实体之间存在任何这种实际的关系或者顺序。
66.以上对本技术所提供的高可靠性摇摆台进行了详细介绍。本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也落入本技术权利要求的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。