技术特征:
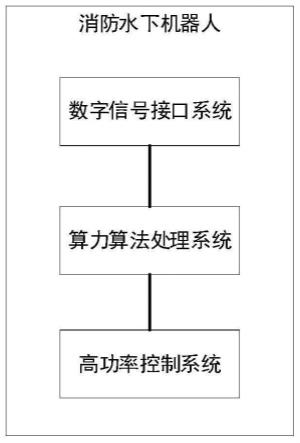
1.一种消防水下机器人,其特征在于,所述消防水下机器人包括:数字信号接口系统,用于监控并获取所述机器人的状态信息;算力算法处理系统,用于根据所述状态信息进行运算处理生成针对所述机器人的控制信息;高功率控制系统,用于根据所述控制信息对所述机器人进行控制。2.根据权利要求1所述的消防水下机器人,其特征在于,所述数字信号接口系统,包括:传感器模块,用于对所述机器人进行监控并获取所述机器人的状态信号;信号接口模块,用于将所述传感器模块获取的状态信号通过所述信号接口模块传输至信号处理模块;信号处理模块,用于将所述传感器模块获取的状态信号转换成状态信息;第一通信模块,用于将所述状态信息输出至算力算法处理系统进行处理。3.根据权利要求2所述的消防水下机器人,其特征在于,所述信号接口模块,包括:以太网接口、电力线载波接口、usb接口、type-c接口、can接口以及uart接口中的至少一个。4.根据权利要求2所述的消防水下机器人,其特征在于,所述传感器模块包括以下至少一种:湿度传感器、温度传感器、陀螺仪、地磁传感器、加速度传感器。5.根据权利要求2所述的消防水下机器人,其特征在于,所述状态信息包括以下至少一种:温度信息、湿度信息、姿势信息、方向信息、倾角信息。6.根据权利要求1所述的消防水下机器人,其特征在于,所述算力算法处理系统,包括,核心处理模块,用于根据所述状态信息生成针对所述机器人的控制信息,其中所述控制信息包括导航控制信息和/或功率控制信息;第二通信模块,用于接收所述数字信号接口系统输出的状态信息,以及输出所述核心处理模块生成的所述控制信息。7.根据权利要求6所述的消防水下机器人,其特征在于,所述核心处理模块包括:gpu处理单元,用于根据所述状态信息生成针对机器人的导航控制信息;多核处理器,用于根据所述状态信息生成针对机器人的功率控制信息。8.根据权利要求1所述的消防水下机器人,其特征在于,所述高功率控制系统,包括:第三通信模块,用于接收所述算力算法处理系统输出的所述控制信息;功率控制处理模块,用于对所述控制信息进行处理生成控制指令,其中,所述控制指令包括功率控制指令和/或导航控制指令;电源控制模块,用于根据所述功率控制指令控制向所述机器人提供大功率电源;电机控制模块,用于根据所述导航控制指令控制所述机器人进行移动。9.根据权利要求8所述的消防水下机器人,其特征在于,所述功率控制处理模块还用于监控所述高功率控制系统的电路工作状态,当所述电路工作状态为异常状态时,则通过所述第三通信模块对所述异常状态进行输出。10.根据权利要求1至9中任一项所述的消防水下机器人,其特征在于,所述算力算法处理系统分别与所述数字信号接口系统、所述功率控制系统之间通过uart接口和/或can接口进行通信。
技术总结
本申请提供一种消防水下机器人,所述消防水下机器人包括:数字信号接口系统,用于监控并获取所述机器人的状态信息;算力算法处理系统,用于根据所述状态信息进行运算处理生成针对所述机器人的控制信息;高功率控制系统,用于根据所述控制信息对所述机器人进行控制。通过采用本申请技术方案,一方面,使得消防水下机器人通过三个具有独立处理器的子系统,实现高功率电路与高速信号并存的电路,保证高功率运动控制的实时有效性,以及高速数字电路的信号完整性;另一方面,采用多个子系统耦合的方式,方便进行远程控制以及便于对机器人进行升级和维护。级和维护。级和维护。
技术研发人员:胡斌 王子幼 周兆威 展杰 钟建鹏
受保护的技术使用者:应急管理部上海消防研究所
技术研发日:2022.10.12
技术公布日:2022/12/6
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。