1.本实用新型涉及机械仿生领域,特别是指一种仿生机械蛇。
背景技术:
2.仿生学是当今世界应用特别广泛的一门学科。仿生机器人运动学是仿生学里一个很重要的发展。对仿生机器人的研究可以满足一些行业的需求,从而产生巨大的经济效益。作为一种新型的仿生机器人,仿生机械蛇具有低重心、多关节、多自由度、多冗余度等特点。
3.现有的仿生机械蛇其动作结构不够灵活,仅能实现简单的动作,且动作幅度较小,运动迟缓。
技术实现要素:
4.本实用新型为解决现有技术中存在的问题,提出一种仿生机械蛇。
5.本实用新型的技术方案是这样实现的:
6.一种仿生机械蛇,包括:移动机构、转向机构、控制机构,两个所述移动机构各通过一个所述转向机构连接在所述控制机构的两端;所述移动机构包括外壳体、电机、蜗杆、蜗轮、齿轮一、齿轮二;
7.所述外壳体为中空体,其有四个面,在每个面上均设有三组转动连接的所述齿轮一,每组均由两个所述齿轮一和一根转轴组成,所述齿轮一通过所述转轴分别安装在所述中空体的前端、中部和后端;
8.所述电机安装在所述外壳体的一端,所述电机与蜗杆轴连接,所述蜗杆位于所述外壳体的中心,在所述外壳体中部还设有四个蜗轮,所述蜗杆与所述蜗轮组成蜗轮蜗杆传动机构,每个所述蜗轮对应所述外壳体的一个侧面,所述蜗轮的两侧各设有一个所述齿轮二,所述外壳体每个面上单排所述齿轮一与对应的所述齿轮二上套有行走履带。
9.所述转向机构是由舵机一、舵机二、短u支架、长u支架组成的多自由度机构,所述舵机一为纵向关节、所述舵机二为横向关节,所述转向机构两端的所述短u支架分别与所述移动机构和所述控制机构铰接;
10.所述控制机构包括长壳体以及安装在所述外壳体内的单片机、电机驱动、稳压板、蓄电池,所述蓄电池作为本装置的总供电装置,所述长壳体为中空的四面结构,在每个面上均设有三组滚轮,所述滚轮通过滚轴可转动连接安装在所述长壳体的四面。
11.进一步,所述舵机一与所述舵机二的两端均分别设有铰接的所述短u支架和所述长u支架,所述舵机一和所述舵机二上的所述短u支架之间背靠背垂直连接,所述舵机一上的所述长u支架背部与一个所述短u支架平行连接,所述舵机二上的所述长u支架与一个所述短u支架垂直连接。
12.进一步,所述单片机采用国产灵动mm32spin27ps。
13.进一步,所述电机驱动采用drv8701双电机驱动。
14.有益效果是:本装置的移动机构中每个面上均设有两组行走履带,利用一根蜗杆
提供动力,所以每组履带的转动均是同步的,任意一面接触时都可以实现移动机构的运动;舵机一和舵机二以及短u支架、长u支架可以实现水平和竖直两个方向的转动,从而实现机械蛇的抬头以及转向等功能。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
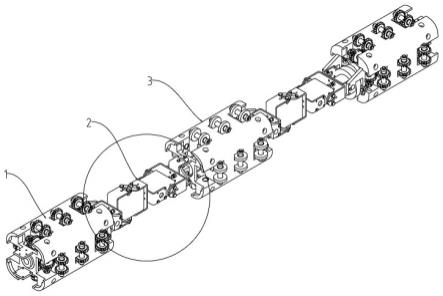
16.图1为本实用新型的结构示意图;
17.图2为移动机构的结构示意图一;
18.图3为移动机构的结构示意图二;
19.图4为转向机构的结构示意图;
20.图5为控制机构的结构示意图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.如图1~图5所示1.一种仿生机械蛇,其特征在于,包括:移动机构1、转向机构2、控制机构3,两个移动机构1各通过一个转向机构2连接在控制机构3的两端,移动机构1为本装置提供运动的动力,转向机构2为本装置提供上下左右的转向能力,从而实现整体的抬头、转向等功能。
23.外壳体101为中空体,其有四个面,在每个面上均设有三组转动连接的齿轮一102,每组均由两个齿轮一102和一根转轴103组成,齿轮一102通过转轴103分别安装在中空体的前端、中部和后端,在外壳体101的侧壁上带有安装转轴103的转轴座104,转轴103安装在转轴座104上,在安装齿轮一102的外壳体101上开槽,使得齿轮一102下端位于外壳体101内部。
24.移动机构1包括外壳体101、电机105、蜗杆106、蜗轮107、齿轮一102、齿轮二108,电机105安装在外壳体101的一端,蜗杆106位于外壳体101的中心,电机105带动蜗杆106转动,在外壳体101中部的四个蜗轮107与蜗杆106组成蜗轮蜗杆传动机构,蜗轮107通过轴安装在外壳体101内部,每个蜗轮107对应外壳体101的一个侧面,当蜗杆106转动时,蜗轮107会同步转动,蜗轮107的两侧各设有一个齿轮二108,外壳体101每个面上单排齿轮一102与对应的齿轮二108上套有行走履带109,电机105转动带动蜗杆106转动,蜗杆106带动蜗轮107转动,与蜗轮107同轴的齿轮二108带动行走履带109,任意一面与地面或者其他面接触时,移动机构1均可以实现运动。
25.转向机构2是由舵机一201、舵机二202、短u支架203、长u支架204组成的多自由度机构,舵机一201为纵向关节、舵机二202为横向关节,转向机构2两端的短u支架203分别与
移动机构1和控制机构3铰接,舵机一201与舵机二202的两端均分别设有铰接的短u支架203和长u支架204,舵机一201和舵机二202上的短u支架203之间背靠背垂直连接,舵机一201上的长u支架204与长壳体301上一个短u支架203垂直连接,舵机二202上的长u支架204与外壳体101上一个短u支架203垂直连接。
26.舵机一201和舵机二202以及短u支架203、长u支架204可以实现水平和竖直两个方向的转动,从而实现机械蛇的抬头以及转向等功能。
27.控制机构3包括长壳体301,在每个面上均设有三组滚轮302,滚轮302通过滚轴303可转动连接安装在长壳体301的四面,滚轮302的设置为了在移动机构1移动时,控制机构3也可以随之移动,若无滚轮302,长壳体301与地面摩擦力会过大。
28.控制机构3内设有控制用的单片机304、电机驱动305、蓄电池306等设备,作为本装置的控制和驱动中枢,单片机304采用国产灵动mm32spin27ps,通过单片机304建立与电脑的通信,对电机105和两个舵机进行控制,单片机304的控制信号为5v,不能直接驱动电机105和舵机,所以我们采用了drv8701双电机驱动305来直接驱动电机105,该电机驱动305每控制一路电机105,需要占用单片机304的一路pwm和一路普通io,相比于占用两路io的电机驱动305,大大节省了单片机304的时钟资源。
29.在供电方面,优选一块12v的电池,瞬时电流可达到36a,满足了供电需求,单片机304、电机驱动305、舵机并联,可以分为三路:第一路,蓄电池306通过稳压模块307稳压到5v,给单片机304供电;第二路,蓄电池306通过稳压模块307稳压到7v给两个舵机供电,第三路,蓄电池306通过稳压模块307稳压到7v给电机驱动305供电,舵机的三根线分别为信号线、电源正极、电源负极;电源正负极直接与稳压模块307的输出相连,信号线与单片机304产生pwm的对应引脚相连,电机驱动305的输入正负极需要与稳压模块307的输出相连,控制引脚与单片机304的对应引脚相接,输出分别和电机相连。
30.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。