1.本发明涉及一种有源声响控制程序、麦克风和发动机转速获取装置,其中,所述有源声响控制程序用于使运算处理装置执行生成控制信号的处理,该控制信号用于使设置于车厢内的扬声器输出抵消音,以降低车辆的车厢内的噪声;所述麦克风检测在使运算处理装置按照有源声响控制程序执行处理时使用的抵消误差噪声;所述发动机转速获取装置检测在使运算处理装置按照有源声响控制程序执行处理时使用的发动机转速。
背景技术:
2.在日本发明专利公开公报特开2012-131244号中公开了以下内容:在移动终端中安装有源声响控制程序,并且从服务器下载适合于车辆的噪声传递特性,从而将移动设备用作有源声响控制装置。
技术实现要素:
3.在日本发明专利公开公报特开2012-131244号中没有研究以下技术:通过在任何人均能够轻易地获得的设备中安装有源声响控制程序,能够与车辆的车型无关而降低车厢内的噪声。
4.本发明是为了解决上述问题而完成的,其目的在于提供一种有源声响控制程序,通过在任何人均能够轻易地获得的设备中安装该有源声响控制程序,能够与车辆的车型无关而降低车厢内的噪声。并且,本发明的目的在于提供一种麦克风和发动机转速获取装置,所述麦克风检测在使运算处理装置按照有源声响控制程序执行处理时使用的抵消误差噪声;所述发动机转速获取装置检测在使运算处理装置按照有源声响控制程序执行处理时使用的发动机转速。
5.本发明的第1技术方案是一种有源声响控制程序,其利用与服务器进行数据收发的通信设备来下载,并且使运算处理装置执行生成控制信号的处理,其中,所述控制信号用于使设置在所述车厢内的扬声器输出抵消音以降低车辆的车厢内的噪声,所述有源声响控制程序的特征在于,包括基准信号生成部、自适应陷波滤波器、误差信号输入部、确定部、参照信号生成部和滤波器系数更新部,其中,所述基准信号生成部生成与噪声源所产生的所述噪声对应的基准信号;所述自适应陷波滤波器对所述基准信号进行自适应信号处理而生成所述控制信号;所述误差信号输入部输入误差信号,该误差信号相当于根据所述控制信号从所述扬声器输出的所述抵消音与所述噪声的抵消误差噪声;所述确定部确定车厢内空间中的声音的传递特性,生成修正值;所述参照信号生成部根据所述修正值对所述基准信号进行修正,生成参照信号;所述滤波器系数更新部根据所述误差信号和所述参照信号,对所述自适应陷波滤波器的滤波器系数进行逐次更新以使所述误差信号达到最小。
6.本发明的第2技术方案是一种麦克风,其检测在使所述运算处理装置按照上述第1技术方案中记载的有源声响控制程序执行处理时所使用的所述抵消误差噪声,通过有线方式或无线方式与安装了利用所述通信设备下载的所述有源声响控制程序的装置连接,并以
能够拆装的方式被安装于所述车厢内。
7.本发明的第3技术方案是一种发动机转速获取装置,其获取在使所述运算处理装置按照上述第1技术方案的有源声响控制程序执行处理时所使用的所述发动机转速,通过有线方式或无线方式与所述装置连接,并以能够拆装的方式被安装于所述车厢内。
8.根据本发明,通过在任何人均能轻易地获得的设备中安装有源声响控制程序,能够与车辆的车型无关而降低车厢内的噪声。
附图说明
9.图1是说明有源声响控制的概要的图。图2是智能手机和车载系统的框图。图3a和图3b是表示车厢内的麦克风的设置位置的例子的图。图4是有源声响控制装置的框图。图5是有源声响控制装置的框图。图6是与发动机的气缸数量对应的振动频率所具有的分量的次数的表。图7是表示与各规定频率对应的控制滤波器系数的值的表。图8a是表示有源噪声控制处理的流程的流程图。图8b是表示设定处理的流程的流程图。图8c是表示设定处理的流程的流程图。图8d是表示设定处理的流程的流程图。图9是表示智能手机的图。图10是表示智能手机的图。图11是表示智能手机的图。图12是表示智能手机的图。图13是表示智能手机的图。图14是表示智能手机的图。图15是表示智能手机的图。图16是表示智能手机的图。图17是有源声响控制装置的框图。图18是有源声响控制装置的框图。图19a~图19c是表示车厢内的麦克风的设置位置的例子的图。图20是有源噪声控制的示意图。图21是智能手机、车载系统和车辆信息获取装置的框图。图22a和图22b是表示车厢内的车辆信息获取装置的设置位置的例子的图。图23是智能手机和车载系统的框图。图24是有源声响控制装置的框图。
具体实施方式
10.〔第1实施方式〕图1是说明在有源声响控制装置10中执行的有源声响控制的概要的图。
11.有源声响控制装置10使从设置于车辆12的车厢14内的扬声器16输出抵消音,从而降低因发动机18的振动而向车厢14内的乘员传递的发动机轰鸣声(以下,记载为噪声)。有源声响控制装置10根据误差信号e和由发动机转速传感器19检测到的发动机转速ne来生成用于使扬声器16输出抵消音的控制信号u0,其中,误差信号e相当于由设置于车厢14内的麦克风20收集到的声音。误差信号e是相当于抵消误差噪声的信号,该抵消误差噪声是在麦克风20的位置合成抵消音和噪声而得到的噪声。此外,发动机18相当于本发明的驱动源,发动机转速传感器19相当于本发明的发动机转速获取装置。
12.图2是搭载于智能手机22和车辆12的车载系统24的框图。
13.智能手机22经由互联网28从服务器26下载有源声响控制程序。下载的有源声响控制程序被安装于智能手机22。智能手机22相当于本发明的通信设备。
14.智能手机22具有未图示的外部连接端子和耳机/麦克风端子这两个端子,作为与外部设备连接的端子。智能手机22通过有线方式与车载系统24以及麦克风20连接,通过无线方式与发动机转速传感器19连接。
15.此外,在智能手机22通过有线方式与发动机转速传感器19连接的情况下,智能手机22也可以通过无线方式与车载系统24连接。另外,近年来,也有不具有耳机/麦克风端子的智能手机22,该情况下,麦克风20也可以通过无线方式连接。
16.发动机转速传感器19与设置于车辆12的obd(车载自动诊断系统,on-board diagnostics)连接器112连接。obd连接器112经由can或k线连接到车载ecu。能够从obd连接器112获取发动机转速、水温、电压、增压压力等车辆信息。
17.发动机转速传感器19也可以通过usb等有线方式与车载系统24连接。在这种情况下,发动机转速传感器19经由车载系统24获取在can中流动的发动机转速的信息。
18.另外,也可以不设置发动机转速传感器19,而是由智能手机22根据车辆12的对智能手机22等进行充电的充电用的dc电压变动来推定发动机转速。
19.麦克风20以在车厢14内用户能够容易地拆装的方式被设置于车厢14内。图3a和图3b是表示麦克风20在车厢14内的设置位置的例子的图。在车辆12是右舵车辆的情况下,如图3a所示,麦克风20通过双面胶带等被固定于驾驶席15的头枕15a的左侧表面(车辆中央侧)。
20.麦克风20所设定的位置不限于图3a所示的位置。例如,如图3b所示,麦克风20也可以通过双面胶带等被固定于驾驶席15的座椅靠背15b的左侧表面(车辆中央侧)。此外,在车辆12为左舵车辆的情况下,麦克风20被设置于驾驶席15的头枕15a或座椅靠背15b的右侧表面。
21.再参照图2,智能手机22具有运算处理装置29、存储器(memory)30、存储设备(storage)31、麦克风32、显示器34、触摸屏36、加速度传感器37、移动通信模块38、无线lan通信模块40和近距离无线通信模块(近场通信模块)42。此外,加速度传感器37相当于本发明的加速度检测部。
22.运算处理装置29例如是中央处理装置(cpu)、微处理器(mpu)等处理器。存储器30例如是rom、ram等非暂时性或暂时性的有形计算机可读记录介质。存储设备31例如是硬盘、固态驱动器(ssd)等非暂时性的有形计算机可读记录介质。
23.当在智能手机22中安装有有源声响控制程序时,有源声响控制程序被存储到存储
设备31中。通过由运算处理装置29按照存储设备31中存储的有源声响控制程序进行有源声响控制处理,智能手机22作为有源声响控制装置10发挥功能。
24.麦克风32收集智能手机22周边的声音。显示器34是使用例如液晶、有机电致发光(有机el)等的显示装置。触摸屏36是检测显示器34上的用户用手指等触摸的位置的定点设备(pointing device)。加速度传感器37检测作用于智能手机22的加速度。在智能手机22位于车厢14内的情况下,加速度传感器37所检测到的加速度能够视为车辆12的加速度。
25.移动通信模块38是通过蜂窝通信与连接在互联网28上的基站28a进行通信的模块。无线lan通信模块40例如是通过wi-fi(注册商标)等无线lan通信与连接于互联网28的接入点(access point)28b进行通信的模块。据此,智能手机22能够经由互联网28与服务器26进行数据收发。近距离无线通信模块42是通过例如蓝牙(注册商标)等近距离无线通信与车载系统24进行通信的模块。
26.车载系统24具有运算处理装置43、存储器44、音源45、显示器46、触摸屏48以及近距离无线通信模块50、放大器53。
27.运算处理装置43例如是中央处理装置(cpu)、微处理器(mpu)等处理器。存储器44例如是rom、ram等非暂时性或暂时性的有形计算机可读记录介质。音源45例如是硬盘、固态驱动器(ssd)等非暂时性的有形计算机可读记录介质,存储有音乐、汽车导航的导航语音等信息。
28.显示器46例如是使用液晶、有机电致发光(有机el)等的显示装置。触摸屏48是检测显示器46上的用户用手指等触摸的位置的定点设备。近距离无线通信模块50是通过例如蓝牙(注册商标)等近距离无线通信与发动机转速传感器19、智能手机22等进行通信的模块。此外,作为与发动机转速传感器19、智能手机22等的通信,也可以代替无线通信而使用usb等有线通信。
29.车载系统24经由放大器53与扬声器16连接。车载系统24与扬声器16通过有线方式连接。此外,车载系统24与扬声器16也可以通过无线方式连接。运算处理装置43输出用于使扬声器16输出被存储于音源45的音乐、语音的音源信号。音源信号在放大器53中被放大后输出给扬声器16。运算处理装置43将从智能手机22(有源声响控制装置10)发送来的控制信号u0发送给放大器53。此外,也可以从智能手机22(有源声响控制装置10)向放大器53直接发送控制信号u0。控制信号u0在放大器53中被放大,并输出给扬声器16。据此,从扬声器16输出音源的音乐、语音并且输出抵消噪声的抵消音。
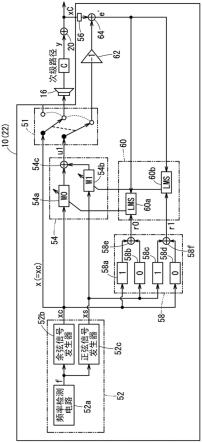
30.[有源声响控制装置]图4和图5是有源声响控制装置10的框图。在有源声响控制装置10中,作为自适应数字滤波器,使用作为陷波滤波器的san(single-frequency adaptive notch,单频自适应陷波滤波器)滤波器。另外,san过滤器的系数的更新使用filtered-x lms(least mean square,最小均方)算法。本实施方式的有源声响控制装置10实施有源噪声控制作为有源声响控制。本实施方式的有源声响控制装置10在进行有源噪声控制处理(以下,称为anc处理)之前,进行确定处理,该确定处理为确定从扬声器16到麦克风20的传递路径(以下,称为次级路径)中的声音的传递特性c(以下,称为次级路径传递特性c)的处理。以下,将由本实施方式的有源声响控制装置10进行的有源噪声控制称为事前确定式有源噪声控制。此外,将从扬声器16到麦克风20的传递路径称为次级路径,与此相对,以下将从发动机18到麦克风
20的传递路径称为初级路径。
[0031]
图4表示anc处理中的有源声响控制装置10的框图。图5是表示确定处理中的有源声响控制装置10的框图。有源声响控制装置10通过处理切换部51切换anc处理和确定处理。
[0032]
(anc处理)使用图4,对在anc处理中在有源声响控制装置10中进行的信号处理进行说明。有源声响控制装置10具有基准信号生成部52、控制信号生成部54、误差信号输入部56、参照信号生成部58和控制滤波器系数更新部60。此外,控制信号生成部54相当于本发明的自适应陷波滤波器,控制滤波器系数更新部60相当于本发明的滤波器系数更新部和确定部。
[0033]
基准信号生成部52根据发动机转速ne生成基准信号xc、xs。基准信号生成部52具有频率检测电路52a、余弦信号发生器52b和正弦信号发生器52c。
[0034]
频率检测电路52a检测与发动机18的输出轴的旋转同步产生的噪声(轰鸣声)的基本频率即振动频率f。发动机18的轰鸣声是由于发动机18的旋转所产生的激振力传递给车身而产生的振动辐射声,因此是与发动机18的转速同步的具有显著的频率特性的振动噪声。例如,在发动机18为四冲程四气缸的情况下,由于发动机18的输出轴的每1/2旋转所产生的气体燃烧引起的转矩变动,产生以发动机18为基点的激振振动。这导致在车厢14内产生噪声。
[0035]
根据发动机转速ne来检测振动频率f。发动机转速ne可以通过下式换算为旋转频率fe。
[0036]
[数式1]fe[hz]=ne[rpm]/60[sec]
[0037]
例如,在发动机转速ne为6000[rpm]的情况下,旋转频率fe为100[hz]。
[0038]
在发动机18为四冲程的情况下,在各气缸中每旋转2圈进行1次点火。例如,在四气缸的发动机18中发动机转速ne为6000[rpm]的情况下,振动频率f如下所示。
[0039]
[数式2]
[0040]
即,四气缸的发动机18的振动频率f具有旋转频率fe的2次分量(2倍分量)。图6是表示与发动机18的气缸数量对应的振动频率f所具有的分量的次数(倍数)的表。振动频率f能够通过对旋转频率fe乘以与发动机18的气缸数量对应的次数来求出。
[0041]
余弦信号发生器52b生成振动频率f的余弦信号即基准信号xc(=cos(2πft))。正弦信号发生器52c生成振动频率f的正弦信号即基准信号xs(=sin(2πft))。在此,t表示时刻。
[0042]
控制信号生成部54根据基准信号xc、xs生成控制信号u0。控制信号生成部54相当于本发明的自适应陷波滤波器。控制信号生成部54具有第1控制滤波器54a、第2控制滤波器54b和加法器54c。
[0043]
在控制信号生成部54中,使用san滤波器作为控制滤波器。
[0044]
第1控制滤波器54a具有滤波器系数w0。第2控制滤波器54b具有滤波器系数w1。滤波器系数w0、w1通过在后述的控制滤波器系数更新部60中进行自适应更新而被优化。
[0045]
将在第1控制滤波器54a中滤波处理后的基准信号xc和在第2控制滤波器54b中滤
sweep)。
[0058]
在确定处理中,确定各规定频率fm的次级路径传递特性c作为次级路径滤波器系数c^。在发动机18停止时执行确定处理。在确定处理中,第1次级路径滤波器58a的滤波器系数被固定为1,第2次级路径滤波器58b的滤波器系数被固定为0,第3次级路径滤波器58c的滤波器系数被固定为1,第4次级路径滤波器58d的滤波器系数被固定为0。
[0059]
频率检测电路52a输出规定频率fm(=f0、f1、
…
、fm-1)。余弦信号发生器52b生成规定频率fm的余弦信号即基准信号xc。正弦信号发生器52c生成规定频率fm的正弦信号即基准信号xs。
[0060]
基准信号xc作为确定信号x输出。根据确定信号x控制扬声器16,从扬声器16输出确定声。
[0061]
误差信号输入部56输入噪声信号xc,该噪声信号xc相当于在麦克风20中收集到的确定声。噪声信号xc被输入给加法器64。
[0062]
将在第1控制滤波器54a中滤波处理后的基准信号xc和在第2控制滤波器54b中滤波处理后的基准信号xs在加法器54c中相加而生成控制信号u1。控制信号u1的极性由反转器62反转,并输入到加法器64。在加法器64中,生成噪声信号xc与控制信号u1之间的差分即虚拟误差信号e
′
。
[0063]
控制滤波器系数更新部60根据参照信号r0、r1和虚拟误差信号e
′
,对控制信号生成部54的滤波器系数w0、w1进行自适应信号处理。
[0064]
第1控制滤波器系数更新部60a和第2控制滤波器系数更新部60b根据下式来更新滤波器系数w0、w1。
[0065]
[数式4]w0(n 1)=w0(n)-μ0
×e′
(n)
×
xc(n)w1(n 1)=w1(n)-μ1
×e′
(n)
×
xs(n)
[0066]
在确定处理中,频率检测电路52a对规定频率fm进行扫频,控制滤波器系数更新部60按各规定频率fm的每一规定频率以规定时间自适应更新滤波器系数w0、w1。自适应更新后的滤波器系数w0按各规定频率fm的每一规定频率被作为滤波器系数c0^进行记录,自适应更新后的滤波器系数w1按各振动频率f的每一振动频率被作为滤波器系数c1^进行记录。图7是表示与各规定频率f0、f1、
…
、fa-1对应的滤波器系数c0^、c1^的值的表。确定处理中的控制滤波器系数更新部60相当于本发明的确定部。
[0067]
[智能手机中的有源噪声控制处理]图8a是表示智能手机22中的有源噪声控制处理的流程的流程图。
[0068]
当在智能手机22中安装有有源声响控制程序时,在智能手机22中能够利用有源声响控制应用程序。图9是表示在显示器34上显示有初始画面34a的智能手机22的图。当在智能手机22中安装有有源声响控制程序时,在初始画面34a中显示有源声响控制应用程序的图标35a。当用户点击图标35a时,启动有源声响控制应用程序,运算处理装置29执行有源噪声控制处理。有源噪声控制处理以规定周期反复执行,直到用户进行后述的anc off操作为止。
[0069]
在步骤s1中,运算处理装置29在显示器34上显示anc on操作画面34b,然后转移到步骤s2。图10是表示在显示器34上显示有anc on操作画面34b的智能手机22的图。anc on操
作画面34b具有anc on按钮35b、复选框35c和设定按钮35r。
[0070]
在步骤s2中,运算处理装置29判定是否由用户进行了设定操作。在进行了设定操作的情况下,转移到步骤s3,在没有进行设定操作的情况下,转移到步骤s4。当用户点击设定按钮35r时,运算处理装置29判定为用户进行了设定操作。
[0071]
在步骤s3中,运算处理装置29进行后述的设定处理,然后转移到步骤s4。
[0072]
在步骤s4中,运算处理装置29判定用户是否执行了anc on操作。在进行了anc on操作的情况下,转移到步骤s5,在没有进行anc on操作的情况下,返回步骤s2。当用户点击anc on按钮35b时,运算处理装置29判定为用户执行了anc on操作。
[0073]
在步骤s5中,运算处理装置29判定是否选中了跳过确定处理。在选中了跳过确定处理的情况下,转移到步骤s10,在没有选中跳过确定处理的情况下,转移到步骤s6。在图10的anc on操作画面34b中,当用户在点击而选中复选框35c后点击anc on按钮35b时,运算处理装置29判定为选中了跳过确定处理。
[0074]
在步骤s6中,运算处理装置29执行确定处理,并转移到步骤s7。
[0075]
在步骤s7中,运算处理装置29使显示器34显示确定处理通知画面34f,并转移到步骤s8。图11是表示在显示器34上显示有确定处理通知画面34f的智能手机22的图。在确定处理通知画面34f中显示用于向用户传达正在进行确定处理和产生噪声的消息。据此,抑制由于产生噪声而给用户带来的不舒服感和不安感。
[0076]
在步骤s8中,运算处理装置29判定确定处理是否已结束。在确定处理已结束的情况下,转移到步骤s9,在确定处理没有结束的情况下,返回到步骤s6。
[0077]
在步骤s9中,运算处理装置29使显示器34显示确定处理结束通知画面34g,然后转移到步骤s10。图12是表示在显示器34上显示有确定处理结束通知画面34g的智能手机22的图。确定处理结束通知画面34g显示用于向用户传达确定处理已结束和执行anc处理的消息。
[0078]
在步骤s10中,运算处理装置29执行anc处理,然后转移到步骤s11。
[0079]
在步骤s11中,运算处理装置29在显示器34上显示anc处理通知画面34h,然后转移到步骤s12。图13是表示在显示器34上显示anc处理通知画面34h的智能手机22的图。在anc处理通知画面34h中显示用于向用户传达正在进行anc处理的图像。另外,在anc处理通知画面34h上显示有anc off按钮35q。
[0080]
在步骤s12中,运算处理装置29判定是否进行了anc off操作。在进行了anc off操作的情况下,结束有源噪声控制处理。在没有进行anc off操作的情况下,返回步骤s10。当用户点击anc off按钮35q时,运算处理装置29判定为用户进行了anc off操作。
[0081]
图8b、图8c和图8d是表示在步骤s3中执行的设定处理的流程的流程图。如上所述,当用户点击图10所示的设定按钮35r以执行设定操作时,执行设定处理。例如,在智能手机22中安装有源性噪声控制程序后初次启动有源声响控制应用程序时、变更麦克风20的数量时、重新购买车辆时等,执行设定操作。
[0082]
在步骤s21中,运算处理装置29使显示器34显示发动机气缸数量输入画面34c,然后转移到步骤s22。图14是表示在显示器34上显示有发动机气缸数量输入画面34c的智能手机22的图。发动机气缸数量输入画面34c具有发动机气缸数量输入部35d、help按钮35e和下一步按钮35f。
[0083]
在步骤s22中,运算处理装置29向自变量m和自变量n输入0,并转移到步骤s23。
[0084]
在步骤s23中,运算处理装置29判定是否进行了help操作。在进行了help操作的情况下,转移到步骤s29,在没有进行help操作的情况下,转移到步骤s24。当用户点击help按钮35e时,运算处理装置29判定为由用户进行了help操作。
[0085]
在步骤s24中,运算处理装置29判定用户是否已完成向发动机气缸数量输入部35d输入发动机18的气缸数量。在已完成发动机18的气缸数量的输入的情况下,转移到步骤s25,在没有完成输入的情况下,转移到步骤s26。
[0086]
在步骤s25中,运算处理装置29使自变量m增量,即,使自变量m的数值增加1,然后转移到步骤s28。
[0087]
在步骤s26中,运算处理装置29判定用户是否进行了下一步操作。在进行了下一步操作的情况下,转移到步骤s27,在没有进行下一步操作的情况下,转移到步骤s28。当用户点击下一步按钮35f时,运算处理装置29判定为用户进行了下一步操作。
[0088]
在步骤s27中,运算处理装置29使自变量n增量,然后转移到步骤s28。
[0089]
在步骤s28中,运算处理装置29判定自变量m和自变量n的乘积是否为0。在自变量m和自变量n的乘积为0的情况下,返回步骤s23,在自变量m和自变量n的乘积不为0的情况下,转移到步骤s40。
[0090]
在步骤s23中判定为用户进行了help操作的情况下转移到的步骤s29中,运算处理装置29判定自变量m是否为0。在自变量m为0的情况下,转移到步骤s30,在自变量m不为0的情况下,返回步骤s23。
[0091]
在步骤s30中,运算处理装置29在显示器34上显示检索画面34d,然后转移到步骤s31。图15是表示在显示器34上显示有检索画面34d的智能手机22的图。检索画面34d具有车名输入部35g、等级输入部35h和search按钮(检索按钮)35j。
[0092]
在步骤s31中,运算处理装置29向自变量l、自变量m和自变量n输入0,然后转移到步骤s32。
[0093]
在步骤s32中,运算处理装置29判定用户是否已完成向车名输入部35g输入车名。在已完成输入车名的情况下,转移到步骤s33,在没有完成输入的情况下,转移到步骤s34。
[0094]
在步骤s33中,运算处理装置29使自变量l增量,然后转移到步骤s38。
[0095]
在步骤s34中,运算处理装置29判定用户是否已完成向等级输入部35h输入等级(grade)。在已完成输入等级的情况下,转移到步骤s35,在没有完成输入的情况下,转移到步骤s36。
[0096]
在步骤s35中,运算处理装置29使自变量m增量,然后转移到步骤s38。
[0097]
在步骤s36中,运算处理装置29判定用户是否进行了search操作。在进行了search操作的情况下,转移到步骤s37,在没有进行search操作的情况下,转移到步骤s38。当用户点击search按钮35j时,运算处理装置29判定为用户进行了search操作。
[0098]
在步骤s37中,运算处理装置29使自变量n增量,然后转移到步骤s38。
[0099]
在步骤s38中,运算处理装置29判定自变量l、自变量m和自变量n的乘积是否为0。在自变量l、自变量m和自变量n的乘积为0的情况下,返回步骤s32,在自变量l、自变量m和自变量n的乘积不为0的情况下,转移到步骤s39。
[0100]
在步骤s39中,运算处理装置29从服务器26接收与输入的车名和等级对应的发动
机18的气缸数量,然后转移到步骤s40。
[0101]
在步骤s40中,运算处理装置29使显示器34显示扬声器数量与麦克风数量输入画面34e,然后转移到步骤s41。图16是表示在显示器34上显示有扬声器数量与麦克风数量输入画面34e的智能手机22的图。扬声器数量与麦克风数量输入画面34e具有扬声器数量输入部35k、麦克风数量输入部35m、复选框35n和结束按钮35p。
[0102]
在步骤s41中,运算处理装置29向自变量l和自变量m输入0,然后转移到步骤s42。
[0103]
在步骤s42中,判定用户是否已完成向扬声器数量输入部35k输入扬声器16的数量。在已完成输入扬声器16的数量的情况下,转移到步骤s43,在没有完成输入的情况下,转移到步骤s44。
[0104]
在步骤s43中,运算处理装置29使自变量l增量,然后转移到步骤s46。
[0105]
在步骤s44中,运算处理装置29判定用户是否已完成向麦克风数量输入部35m输入麦克风20的数量。在已完成输入麦克风20的数量的情况下,转移到步骤s45,在没有完成输入的情况下,转移到步骤s47。
[0106]
在步骤s45中,运算处理装置29使自变量m增量,然后转移到步骤s51。
[0107]
在步骤s46中,运算处理装置29判定自变量l和自变量m的乘积是否为0。在自变量l和自变量m的乘积为0的情况下,转移到步骤s50,在自变量l和自变量m的乘积不为0的情况下,转移到步骤s47。
[0108]
在步骤s47中,运算处理装置29判定用户是否选中了使用智能手机22的麦克风32。在选中了使用智能手机22的麦克风32的情况下,转移到步骤s48,在没有选中使用智能手机22的麦克风32的情况下,转移到步骤s49。运算处理装置29在用户点击而选中复选框35n的情况下,判定为选中了使用麦克风32。
[0109]
在步骤s48中,运算处理装置29判定为使用搭载于智能手机22的麦克风32进行有源噪声控制处理,然后转移到步骤s50。
[0110]
在步骤s49中,运算处理装置29判定为不使用搭载于智能手机22的麦克风32进行有源噪声控制处理,然后转移到步骤s50。
[0111]
在步骤s50中,运算处理装置29判定自变量l和自变量m的乘积是否为0。在自变量l和自变量m的乘积为0的情况下,返回到步骤s42,在自变量l、自变量m和自变量n的乘积不为0的情况下,结束设定处理。
[0112]
[使用fir滤波器的有源声响控制装置]以下,作为使用本实施方式的san滤波器的有源声响控制装置10的比较例,对使用fir滤波器的有源声响控制装置66进行说明。
[0113]
图17是使用了fir滤波器的有源声响控制装置66的框图。在有源声响控制装置66中,使用fir(finite impulse response,有限脉冲响应)滤波器作为自适应数字滤波器。另外,filtered-x lms算法用于更新fir滤波器的滤波器系数。
[0114]
有源声响控制装置66具有基准信号生成部68、控制信号生成部70、参照信号生成部72、误差信号接收部74和控制滤波器系数更新部76。
[0115]
基准信号生成部68根据发动机转速ne生成基准信号x。基准信号生成部68具有频率检测电路68a和余弦信号发生器68b。
[0116]
频率检测电路68a与本实施方式的有源声响控制装置10的频率检测电路52a同样,
根据发动机转速ne和发动机18的气缸数量来检测发动机18的振动频率f。
[0117]
余弦信号发生器68b生成振动频率f的余弦信号即基准信号x(=cos(2π ft))。t表示时刻。当fir滤波器的抽头数为n时,通过下式来定义时间步n时的基准信号x(n)的时序信号矢量x(n)。
[0118]
[数式5]x(n)=[x(n),x(n-1),x(n-2),
…
x(n-n 1)]
t
[0119]
控制信号生成部70根据基准信号x的时序信号矢量x生成控制信号u0。在控制信号生成部70中,使用作为自适应滤波器的fir滤波器作为控制滤波器。控制滤波器系数w通过在后述的控制滤波器系数更新部76中被更新而优化。
[0120]
时间步n时的控制滤波器系数w(n)由下式表示。
[0121]
[数式6]w(n)=[w0(n),w1(n),w2(n),
…wn-1
(n)]
t
[0122]
时间步n时的控制信号u0(n)用下式表示。在下式中,“*”表示卷积和。
[0123]
[数式7]
[0124]
另外,时序矢量u0(n)由下式表示。
[0125]
[数式8]u0(n)=[u0(n),u0(n-1),u0(n-2),
…
,u0(n-n 1)]
t
[0126]
在控制信号生成部70中滤波处理后的基准信号x作为控制信号u0被输出。根据控制信号u0控制扬声器16,从扬声器16输出抵消音。
[0127]
参照信号生成部72根据基准信号x生成参照信号r。参照信号生成部72具有次级路径滤波器。次级路径滤波器系数c^的值按每种车型被存储于服务器26,并从服务器26下载到有源声响控制装置66中。时间步n时的次级路径滤波器系数c^(n)由下式表示。
[0128]
[数式9]c^(n)=[c0^(n),c1^(n),c2^(n),
…cn-1
^(n)]
t
[0129]
时间步n时的参照信号r(n)由下式表示。在下式中,“*”表示卷积和。
[0130]
[数式10]
[0131]
另外,时序矢量r(n)由下式表示。
[0132]
[数式11]r(n)=[r(n),r(n-1),r(n-2),
…
,r(n-n 1)]r[0133]
误差信号接收部74接收误差信号e,该误差信号e相当于在麦克风20中收集到的抵消误差噪声。误差信号e是相当于在麦克风20的位置合成抵消音和噪声而成的抵消误差噪声的信号。
[0134]
控制滤波器系数更新部76根据参照信号r和误差信号e,更新控制信号生成部54的控制滤波器系数w。控制滤波器系数更新部60根据filtered-x lms算法来更新控制滤波器系数w。控制滤波器系数更新部76根据下式来更新控制滤波器系数w。
[0135]
[数式12]
[0136]
在控制滤波器系数更新部76中,通过反复更新控制滤波器系数w来优化控制滤波器系数w。由于在控制滤波器系数w的更新式中包含卷积运算,因此,控制滤波器系数w的更新处理所导致的运算负荷增大。
[0137]
[作用效果]期待一种通过任何人均能够轻易地获得的设备来进行降低车厢14内的噪声的有源噪声控制。因此,考虑将有源声响控制程序从服务器26下载到智能手机22中,使智能手机22进行有源噪声控制。
[0138]
在比较例的使用了fir滤波器的有源声响控制装置66中,在控制滤波器系数更新部76中更新控制滤波器系数w的更新式中包含卷积运算。因此,在通过有源声响控制装置66进行有源噪声控制的情况下,运算处理的负荷变得很大,存储器使用量也变多。因此,要求在作为有源声响控制装置66而发挥功能的智能手机22中具有能够进行高速运算处理的运算处理装置29和大容量的存储器30。即,无法将廉价的智能手机22作为有源声响控制装置66发挥功能,从而无法由任何人均能够轻易地获得的设备进行有源噪声控制处理。
[0139]
另外,在比较例的使用fir滤波器的有源声响控制装置66中,从服务器26下载次级路径滤波器系数c^。在有源声响控制装置66中,由于不进行次级路径传递特性c的确定,因此能够减少伴随确定处理产生的运算处理装置29的运算处理的负荷以及存储器30的使用量。由于次级路径传递特性c按照每种车型而不同,因此在服务器26中保存有与按照每种车型的次级路径传递特性c对应的次级路径滤波器系数c^。因此,如果不是在服务器26中保存有次级路径滤波器系数c^的车型,则无法通过有源声响控制装置66抑制车厢14内的噪声。即,利用在服务器26中没有保存次级路径滤波器系数c^的车型的用户无法使智能手机22作为有源声响控制装置66发挥功能。
[0140]
因此,在本实施方式中,使安装了有源声响控制程序的智能手机22作为使用了san滤波器的有源声响控制装置10发挥功能。在有源声响控制装置10中,在控制滤波器系数更新部60中更新控制滤波器系数w的更新式由四则运算构成,不包含卷积运算。
[0141]
因此,在通过有源声响控制装置10进行有源噪声控制的情况下,能够抑制控制滤波器系数w的更新处理所导致的运算负荷。因此,不要求作为有源声响控制装置10发挥功能的智能手机22具有搭载着能够进行高速运算处理的处理器的运算处理装置29和大容量的存储器30。因此,即使是廉价的智能手机22也能够作为有源声响控制装置10发挥功能,从而能够通过任何人均能够轻易地获得的设备进行有源噪声控制处理。
[0142]
另外,在本实施方式中,有源声响控制装置10在控制滤波器系数更新部60中确定次级路径传递特性c,并且生成滤波器系数c0^、c1^作为修正值。滤波器系数c0^、c1^根据多个规定频率fm的确定声而被确定。据此,作为有源声响控制装置10发挥功能的智能手机22能够进行次级路径传递特性c的确定,因此,与车辆12的车型无关,均能够使智能手机22作为有源声响控制装置10发挥功能。
[0143]
另外,在本实施方式中,有源声响控制装置10在基准信号生成部52中根据发动机气缸数量和发动机转速ne生成基准信号xc、xs。据此,有源声响控制装置10能够降低具有车
厢14内的噪声的基本频率即振动频率f的声音。
[0144]
另外,在本实施方式中,麦克风20以可拆装的方式被安装于车厢14内。据此,在用户换乘到其他车辆12时,用户能够从原来的车辆12卸下麦克风20,并将麦克风20安装在其他车辆12上。因此,如果将安装了有源声响控制程序的智能手机22带入其他车辆12,则通过智能手机22也能够在其他车辆12中进行有源噪声控制。
[0145]
〔第2实施方式〕在第1实施方式的有源声响控制装置10中,在进行anc处理之前,在从扬声器16输出确定声(噪声)的状态下进行确定处理。与此相对,在第2实施方式的有源声响控制装置10中,并行进行anc处理和确定处理,确定处理不使用确定声进行。以下,将由本实施方式的有源声响控制装置10进行的有源噪声控制称为通常确定式有源噪声控制。
[0146]
[有源声响控制装置]图18是第2实施方式的有源声响控制装置10的框图。有源声响控制装置10具有基准信号生成部78、控制信号生成部80、第1推定抵消信号生成部82、推定噪声信号生成部84、参照信号生成部86、第2推定抵消信号生成部88、误差信号接收部90、初级路径滤波器系数更新部92、次级路径滤波器系数更新部94和控制滤波器系数更新部96。
[0147]
基准信号生成部78根据发动机转速ne生成基准信号xc、xs。基准信号生成部78具有频率检测电路78a、余弦信号发生器78b和正弦信号发生器78c。由基准信号生成部78进行的处理与由第1实施方式的有源声响控制装置10的基准信号生成部52进行的处理相同。
[0148]
控制信号生成部80根据基准信号xc、xs生成控制信号u0、u1。控制信号生成部80具有第1控制滤波器80a、第2控制滤波器80b、第3控制滤波器80c、第4控制滤波器80d、加法器80e和加法器80f。
[0149]
在控制信号生成部80中,使用san滤波器作为控制滤波器。第1控制滤波器80a具有滤波器系数w0。第2控制滤波器80b具有滤波器系数w1。第3控制滤波器80c具有滤波器系数-w0。第4控制滤波器80d具有滤波器系数w1。在后述的控制滤波器系数更新部96中,通过更新滤波器系数w0、w1,来优化控制滤波器。
[0150]
将在第1控制滤波器80a中滤波处理后的基准信号xc与在第2控制滤波器80b中滤波处理后的基准信号xs在加法器80e中相加而生成控制信号u0。根据控制信号u0来控制扬声器16,从扬声器16输出抵消音。将在第3控制滤波器80c中滤波处理后的基准信号xs与在第4控制滤波器80d中滤波处理后的基准信号xc在加法器80f中相加而生成控制信号u1。
[0151]
第1推定抵消信号生成部82根据控制信号u0、u1生成推定抵消信号y1^。第1推定抵消信号生成部82具有第1次级路径滤波器82a、第2次级路径滤波器82b和加法器82c。
[0152]
在第1推定抵消信号生成部82中,使用san滤波器作为次级路径滤波器。在后述的次级路径滤波器系数更新部94中自适应更新次级路径滤波器系数c^。
[0153]
第1次级路径滤波器82a具有次级路径滤波器系数c^(=c0^ ic1^)的实部即滤波器系数c0^。第2次级路径滤波器82b具有次级路径滤波器系数c^的虚部即滤波器系数c1^。将在第1次级路径滤波器82a中滤波处理后的控制信号u0与在第2次级路径滤波器82b中滤波处理后的控制信号u1在加法器82c中相加而生成推定抵消信号y1^。推定抵消信号y1^是相当于被输入到麦克风20中的抵消音y的信号的推定信号。
[0154]
推定噪声信号生成部84根据基准信号xc、xs生成推定噪声信号d^。推定噪声信号
生成部84具有第1初级路径滤波器84a、第2初级路径滤波器84b和加法器84c。在推定噪声信号生成部84中,使用san滤波器作为初级路径滤波器。在后述的初级路径滤波器系数更新部92中自适应更新初级路径滤波器的系数h^(以下称为初级路径滤波器系数h^)。
[0155]
第1初级路径滤波器84a具有初级路径滤波器的系数h^(=h0^ ih1^)的实部即滤波器系数h0^。第2初级路径滤波器84b具有使初级路径滤波器系数h^的虚部的极性反转而得到的滤波器系数-h1^。将在第1初级路径滤波器84a中滤波处理后的基准信号xc与在第2初级路径滤波器84b中滤波处理后的基准信号xs在加法器84c中相加而生成推定噪声信号d^。推定噪声信号d^是相当于输入到麦克风20中的噪声d的信号的推定信号。
[0156]
参照信号生成部86根据基准信号xc、xs生成参照信号r0、r1。参照信号生成部86具有第3次级路径滤波器86a、第4次级路径滤波器86b、第5次级路径滤波器86c、第6次级路径滤波器86d、加法器86e和加法器86f。
[0157]
在参照信号生成部86中,使用san滤波器作为次级路径滤波器。在后述的次级路径滤波器系数更新部94中自适应更新次级路径滤波器系数c^。
[0158]
第3次级路径滤波器86a具有次级路径滤波器系数c^(=c0^ ic1^)的实部即滤波器系数c0^。第4次级路径滤波器86b具有使次级路径滤波器系数c^的虚部的极性反转而得到的滤波器系数-c1^。第5次级路径滤波器86c具有次级路径滤波器系数c^的实部即滤波器系数c0^。第6次级路径滤波器86d具有次级路径滤波器系数c^的虚部即滤波器系数c1^。
[0159]
将在第3次级路径滤波器86a中滤波处理后的基准信号xc与在第4次级路径滤波器86b中滤波处理后的基准信号xs在加法器86e中相加而生成参照信号r0。将在第5次级路径滤波器86c中滤波处理后的基准信号xs与在第6次级路径滤波器86d中滤波处理后的基准信号xc在加法器84c中相加而生成参照信号r1。滤波器系数c0^、c1^、-c1^相当于本发明的修正值。
[0160]
第2推定抵消信号生成部88根据参照信号r0、r1生成推定抵消信号y2^。第2推定抵消信号生成部88具有第5控制滤波器88a、第6控制滤波器88b和加法器88c。
[0161]
在第2推定抵消信号生成部88中,使用san滤波器作为控制滤波器。第5控制滤波器88a具有滤波器系数w0。第6控制滤波器88b具有滤波器系数w1。在后述的控制滤波器系数更新部96中,通过更新滤波器系数w0、w1,来优化控制滤波器。
[0162]
将在第5控制滤波器88a中滤波处理后的参照信号r0与在第6控制滤波器88b中滤波处理后的参照信号r1在加法器88c中相加而生成推定抵消信号y2^。推定抵消信号y2^是相当于被输入到麦克风20中的抵消音y的信号的推定信号。
[0163]
误差信号接收部90接收误差信号e,该误差信号e相当于在麦克风20中收集到的抵消误差噪声。误差信号e是相当于在麦克风20的位置合成抵消音和噪声而成的抵消误差噪声的信号。
[0164]
在误差信号接收部90中接收到的误差信号e被输入到加法器98。由推定噪声信号生成部84生成的推定噪声信号d^通过反转器100极性反转后,被输入到加法器98中。由第1推定抵消信号生成部82生成的推定抵消信号y1^通过反转器102极性反转后,被输入到加法器98中。在加法器98中,生成虚拟误差信号e1。
[0165]
由推定噪声信号生成部84生成的推定噪声信号d^被输入到加法器104。由第2推定抵消信号生成部88生成的推定抵消信号y2^被输入到加法器104中。在加法器104中生成虚
拟误差信号e2。
[0166]
初级路径滤波器系数更新部92根据基准信号xc、xs和虚拟误差信号e1更新初级路径滤波器系数h^(=h0^ ih1^)。初级路径滤波器系数更新部92根据filtered-x lms(least mean square,最小均方)算法来更新初级路径滤波器系数h^。初级路径滤波器系数更新部92具有第1初级路径滤波器系数更新部92a和第2初级路径滤波器系数更新部92b。
[0167]
第1初级路径滤波器系数更新部92a和第2初级路径滤波器系数更新部92b根据下式来更新滤波器系数h0^、h1^。式中的n表示时间步(n=0,1,2,
…
),μ0和μ1表示步长参数。
[0168]
[数式13]h0^(n 1)=h0^(n)-μ0
×
e1(n)
×
xc(n)h1^(n 1)=h1^(n)-μ1
×
e1(n)
×
xs(n)
[0169]
在初级路径滤波器系数更新部92中,通过反复进行初级路径滤波器系数h^的更新,进行初级路径的传递特性h(以下,称为初级路径传递特性h)的确定。在使用san滤波器的有源声响控制装置10中,初级路径滤波器系数h^的更新式由四则运算构成,不包含卷积运算,因此能够抑制初级路径滤波器系数h^的更新处理所导致的运算负荷。
[0170]
次级路径滤波器系数更新部94根据控制信号u0、u1和虚拟误差信号e1来更新次级路径滤波器系数c^(=c0^ ic1^)。次级路径滤波器系数更新部94根据filtered-x lms算法来更新次级路径滤波器系数c^。次级路径滤波器系数更新部94具有第1次级路径滤波器系数更新部94a和第2次级路径滤波器系数更新部94b。
[0171]
第1次级路径滤波器系数更新部94a和第2次级路径滤波器系数更新部94b根据下式来更新滤波器系数c0^、c1^。式中的μ2和μ3表示步长参数。
[0172]
[数式14]c0^(n 1)=c0^(n)-μ2
×
e1(n)
×
{w0(n)
×
xc(n) w1(n)
×
xs(n)}c1^(n 1)=c1^(n)-μ3
×
e1(n)
×
{-w0(n)
×
xs(n) w1(n)
×
xc(n)}
[0173]
在次级路径滤波器系数更新部94中,通过反复进行次级路径滤波器系数c^的更新,进行次级路径传递特性c的确定。在使用san滤波器的有源声响控制装置10中,由于次级路径滤波器系数c^的更新式由四则运算构成,不包含卷积运算,因此能够抑制次级路径滤波器系数c^的更新处理所导致的运算负荷。
[0174]
控制滤波器系数更新部96根据参照信号r0、r1和虚拟误差信号e2来更新滤波器系数w0、w1。控制滤波器系数更新部96根据filtered-x lms算法来更新控制滤波器系数w。控制滤波器系数更新部96具有第1控制滤波器系数更新部96a和第2控制滤波器系数更新部96b。
[0175]
第1控制滤波器系数更新部96a和第2控制滤波器系数更新部96b根据下式来更新滤波器系数w0、w1。式中的μ4和μ5表示步长参数。
[0176]
[数式15]w0(n 1)=w0(n)-μ4
×
e2(n)
×
{c0(n)
×
xc(n)-c1(n)
×
xs(n)}w1(n 1)=w1(n)-μ5
×
e2(n)
×
(c0(n)
×
xs(n) c1(n)
×
xc(n)}
[0177]
在控制滤波器系数更新部96中,通过反复进行滤波器系数w0、w1的更新来优化控制滤波器。在使用san滤波器的有源声响控制装置10中,滤波器系数w0、w1的更新式由四则运算构成,不包含卷积运算,因此能够抑制滤波器系数w0、w1的更新处理所导致的运算负
荷。
[0178]
[智能手机中的有源噪声控制处理]在本实施方式的有源声响控制装置10中,不需要在anc处理之前进行确定处理。因此,在本实施方式的智能手机22中,不执行在第1实施方式的智能手机22中进行的有源噪声控制处理中的图8a的从步骤s5至步骤s9的处理。
[0179]
另外,在本实施方式的智能手机22的显示器34所显示的anc on操作画面34b中,仅显示anc on按钮35b,不显示复选框35c等。其他处理与第1实施方式的有源声响控制装置10的处置相同。
[0180]
[作用效果]在本实施方式中,使安装了有源声响控制程序的智能手机22作为使用了san滤波器的有源声响控制装置10发挥功能。在有源声响控制装置10中,在初级路径滤波器系数更新部92中更新初级路径滤波器系数h^的更新式、在次级路径滤波器系数更新部94中更新次级路径滤波器系数c^的更新式、以及在控制滤波器系数更新部96中更新控制滤波器系数w的更新式,均由四则运算构成,不包含卷积运算。
[0181]
因此,在通过有源声响控制装置10进行有源噪声控制的情况下,能够抑制由初级路径滤波器系数h^、次级路径滤波器系数c^以及控制滤波器系数w的更新处理所导致的运算负荷。因此,不要求作为有源声响控制装置10而发挥功能的智能手机22具有能够进行高速运算处理的运算处理装置29和大容量的存储器30。因此,即使是廉价的智能手机22也能够作为有源声响控制装置10发挥功能,从而能够通过任何人均能够轻易地获得的设备进行有源噪声控制处理。
[0182]
另外,在本实施方式的有源声响控制装置10中,由于在anc处理中同时进行确定处理,因此即使在anc处理中初级路径传递特性h、次级路径传递特性c发生变化的情况下,也能够确定初级路径传递特性h和次级路径传递特性c。
[0183]
〔第3实施方式〕在第1实施方式和第2实施方式中,在有源声响控制装置10中,根据从一个麦克风20输入的误差信号e来生成用于控制一个扬声器16的控制信号u0。在第3实施方式中,在有源声响控制装置10中,根据从m个麦克风20输入的误差信号e[m](m=0,1,
…
,m-1),产生用于控制l个扬声器16的控制信号u0[l](l=0,1,
…
,l-1)。
[0184]
麦克风20以用户能够容易地拆装的方式被设置于车厢14内。图19a、图19b和图19c是表示在车厢14内设置有两个麦克风20的情况下的设置位置的例子的图。在车辆12为右舵车辆的情况下,如图19a所示,一个麦克风20通过双面胶带等被固定于驾驶席15的头枕15a的右侧表面(车辆外侧),另一个麦克风20通过双面胶带等被固定于副驾驶席17的头枕17a的左侧表面(车辆外侧)。此外,在车辆12为左舵车辆的情况下,一个麦克风20被设置于驾驶席15的头枕15a的左侧表面,另一个麦克风20被设置于副驾驶席17的头枕17a的右侧表面。
[0185]
麦克风20的设定位置不限于图19a所示的位置。例如,在车辆12是右舵车辆的情况下,如图19b所示,也可以为,一个麦克风20通过双面胶带等被固定于驾驶席15的头枕15a的左侧表面(车辆中央侧),另一个麦克风20通过双面胶带等被固定于后部座席13的中央的头枕13a的左侧表面。此外,在车辆12为左舵车辆的情况下,也可以为,一个麦克风20被设置在驾驶席15的头枕15a的右侧表面,另一个麦克风20被设置在后部座席13的中央的头枕13a的
右侧表面。
[0186]
此外,如图19c所示,也可以为,一个麦克风20通过双面胶带等被固定于驾驶席15的头枕15a的左侧表面(车辆的中央侧),另一个麦克风20通过双面胶带等被固定于后部座席13的中央的头枕13a的后侧表面。此外,在车辆12为左舵车辆的情况下,也可以为一个麦克风20被设置于驾驶席15的头枕15a的右侧表面。
[0187]
图20是使用多个麦克风20和多个扬声器16的有源噪声控制的示意图。
[0188]
从发动机18到各麦克风20的传递路径(初级路径)有m个路径,并且每个路径均具有初级路径传递特性h(h[0]~h[m-1])。因此,有源声响控制装置10需要与各初级路径传递特性h对应的m个初级路径滤波器系数h^[0]~h^[m-1]。
[0189]
从各扬声器16到各麦克风20的传递路径(次级路径)有[l
×
m]个路径,并且每个路径均具有次级路径传递特性c(c[0、0]~c[l-1、m-1])。因此,有源声响控制装置10需要与各次级路径传递特性c对应的(l
×
m)个次级路径滤波器系数c^[0、0]~c^[l-1、m-1]。
[0190]
由于扬声器16的数量是l个,因此,有源声响控制装置10需要生成输入到各扬声器16的l个控制信号u0(u0[0]~u0[l-1])。因此,有源声响控制装置10需要l个控制滤波器系数w(w[0]~w[l-1])。
[0191]
即,根据扬声器16的数量和麦克风20的数量来确定初级路径滤波器系数h^、次级路径滤波器系数c^和控制滤波器系数w的数量。
[0192]
在本实施方式的有源声响控制装置10中,根据mefx(multiple error filtered-x)-lms算法进行各滤波器系数的更新。以下,对在第1实施方式中说明的事前确定式有源噪声控制中的控制滤波器系数w的更新式、和在第2实施方式中说明的通常确定式有源噪声控制中的初级路径滤波器系数h^、次级路径滤波器系数c^和控制滤波器系数w各自的更新式进行说明。
[0193]
[事前确定式有源噪声控制中的滤波器系数更新式]用于生成输入到第j个扬声器16的控制信号u0[j]的控制滤波器系数w0[j]、w1[j]的更新式由下式表示。在此,设基准信号为xc、xs,设与从第j个扬声器16到第k个麦克风20的传递路径中的声音的传递特性c[j、k]对应的次级传递滤波器系数为c[j、k]^,设输入到第k个麦克风20的误差信号为e[k]。式中的n表示时间步(n=0,1,2,
…
),μ0和μ1表示步长参数。
[0194]
[数式16][数式16]
[0195]
[通常确定式有源噪声控制中的滤波器系数更新式]与从发动机18到第k个麦克风20的传递路径中的声音的传递特性h[k]对应的初级路径滤波器系数h[k]^(=h0[k]^ ih1[k]^)的更新式由下式表示。在此,设基准信号为xc、xs,第k个麦克风20的虚拟误差信号为e1[k]。式中的n表示时间步(n=0,1,2,
…
),μ0和μ1表示步长参数。
[0196]
[数式17]
h0[k]^(n 1)=h0[k]^(n)-μ0
×
e1[k](n)
×
xc(n)h1[k]^(n 1)=h1[k]^(n)-μ1
×
e1[k](n)
×
xs(n)
[0197]
与从第j个扬声器16到第k个麦克风20的传递路径中的声音的传递特性c[j、k]对应的次级路径滤波器系数c[j、k]^(=c0[j、k]^ ic1[j、k]^)的更新式由下式表示。在此,设基准信号为xc、xs,第k个麦克风20的虚拟误差信号为e1[k],用于生成输入到第j个扬声器16的控制信号u0[j]的控制滤波器系数为w[j](=w0[j] iw1[j])。式中的μ2和μ3表示步长参数。
[0198]
[数式18]c0[j,k]^(n 1)=c0[j,k]^(n)-μ2
×
e1[k](n)
×
{w0[j](n)
×
xc(n) w1[j](n)
×
xs(n)}c1[j,k]^(n 1)=c1[j,k]^(n)-μ3
×
e1[k](n)
×
{-w0[j](n)
×
xs(n) w1[j](n)
×
xc(n)}
[0199]
在生成输入到第j个扬声器16的控制信号u0[j]时使用的控制滤波器系数w0[j]、w1[j]的更新式由下式表示。在此,设基准信号为xc、xs,与从第j个扬声器16到第k个麦克风20的传递路径中的声音的传递特性c[j、k]对应的次级路径滤波器系数为c[j、k]^,第k个麦克风20的虚拟误差信号为e2[k]。式中的μ4和μ5表示步长参数。
[0200]
[数式19][数式19]
[0201]
[作用效果]在本实施方式的有源声响控制装置10中,根据扬声器16的数量和麦克风20的数量来确定初级路径滤波器系数h^、次级路径滤波器系数c^和控制滤波器系数w的数量。据此,本实施方式的有源声响控制装置10能够根据扬声器16的数量和麦克风20的数量来适当地进行有源噪声控制。
[0202]
〔第4实施方式〕在第1实施方式~第3实施方式中,使安装了有源声响控制程序的智能手机22作为有源声响控制装置10发挥功能。与此相对,在本实施方式中,使安装了有源声响控制程序的车辆信息获取装置106作为有源声响控制装置10发挥功能。
[0203]
图21是智能手机22、车载系统24和车辆信息获取装置106的框图。在本实施方式中,对于与第1实施方式~第3实施方式相同的结构省略详细说明。
[0204]
车辆信息获取装置106通过有线方式与智能手机22连接。另外,车辆信息获取装置106通过有线方式与车载系统24连接。车辆信息获取装置106也可以通过无线方式与智能手机22和车载系统24连接。
[0205]
从服务器26经由互联网28向智能手机22下载有源声响控制程序,从智能手机22向车辆信息获取装置106发送有源声响控制程序。在车辆信息获取装置106中安装有从智能手机22发送的有源声响控制程序。
[0206]
anc处理、确定处理的信息可以显示在车载系统24的显示器46上,也可以显示在智
能手机22的显示器34上。
[0207]
车辆信息获取装置106具有运算处理装置107、存储器108、存储设备109和近距离无线通信模块(近场通信模块)110。
[0208]
运算处理装置107例如是中央处理装置(cpu)、微处理器(mpu)等处理器。存储器108例如是rom、ram等非暂时性或暂时性的有形计算机可读记录介质。存储设备109例如是闪存等非暂时性的有形计算机可读记录介质。
[0209]
当在车辆信息获取装置106中安装有有源声响控制程序时,有源声响控制程序被存储到存储设备109中。通过由运算处理装置107按照存储设备109中存储的有源声响控制程序进行有源声响控制处理,运算处理装置107作为有源声响控制装置10发挥功能。
[0210]
近距离无线通信模块110是通过例如蓝牙(注册商标)等近距离无线通信进行通信的模块。在车辆信息获取装置106通过无线方式与智能手机22和车载系统24连接的情况下,使用该近距离无线通信模块110进行与智能手机22和车载系统24的通信。
[0211]
车辆信息获取装置106与被设置于车辆12的obd(on-board diagnostics,车载自动诊断系统)连接器112连接。obd连接器112经由can或k线连接到车载ecu。从obd连接器112能够获取发动机转速、水温、电压、增压压力等车辆信息。
[0212]
车辆信息获取装置106通过有线方式与麦克风20连接。车辆信息获取装置106和麦克风20也可以通过无线方式连接。
[0213]
车辆信息获取装置106以用户能够容易地拆装的方式设置于车厢14内。图22a和图22b是表示车厢14内的车辆信息获取装置106的设置位置的例子的图。如图22a所示,车辆信息获取装置106通过双面胶带等被固定于方向盘21的下部的中心下罩23。从车辆信息获取装置106延伸出配线106a,通过该配线106a,车辆信息获取装置106与智能手机22和车载系统24连接。
[0214]
车辆信息获取装置106的设定位置不限于图22a所示的位置。例如,如图22b所示,也可以通过双面胶带等被固定于中央控制台25的侧表面。
[0215]
[作用效果]在本实施方式中,车辆信息获取装置106与obd连接器112连接。据此,车辆信息获取装置106能够从车载ecu获取发动机转速ne。
[0216]
另外,车辆信息获取装置106以可拆装的方式被安装于车厢14内。据此,在用户换乘其他车辆12时,用户能够从原来的车辆12上拆下车辆信息获取装置106,并将车辆信息获取装置106安装在其他车辆12上。因此,如果将安装了有源声响控制程序的车辆信息获取装置106安装在其他车辆12上,那么通过车辆信息获取装置106也能够在其他车辆12中进行有源噪声控制。
[0217]
〔第5实施方式〕在第1实施方式~第3实施方式中,使安装了有源声响控制程序的智能手机22作为有源声响控制装置10发挥功能。与此相对,在本实施方式中,使安装了有源声响控制程序的车载系统24作为有源声响控制装置10发挥功能。
[0218]
图23是智能手机22和车载系统24的框图。在本实施方式中,对于与第1实施方式~第3实施方式相同的结构省略详细说明。
[0219]
车载系统24通过有线方式与智能手机22连接。车载系统24也可以通过无线方式与
智能手机22连接。
[0220]
从服务器26经由互联网28向智能手机22下载有源声响控制程序,从智能手机22向车载系统24发送有源声响控制程序。在车载系统24中安装有从智能手机22发送的有源声响控制程序。
[0221]
anc处理、确定处理的信息可以显示在车载系统24的显示器46上,也可以显示在智能手机22的显示器34上。
[0222]
车载系统24通过有线方式与发动机转速传感器19和麦克风20连接。车载系统24也可以通过无线方式与发动机转速传感器19和麦克风20连接。
[0223]
[作用效果]在本实施方式中,通过具有移动通信模块38、无线lan通信模块40的智能手机22来进行来自服务器26的有源声响控制程序的下载。并且,所下载的有源声响控制程序被从智能手机22发送到车载系统24,在车载系统24中安装有源声响控制程序。据此,即使是没有搭载移动通信模块、无线lan通信模块的车载系统24,也能够安装有源声响控制程序,从而能够作为有源声响控制装置10发挥功能。
[0224]
〔第6实施方式〕在第1实施方式~第5实施方式中,有源声响控制装置10实施有源声响控制中的有源噪声控制。与此相对,在本实施方式中,有源声响控制装置10除了有源噪声控制之外还进行有源音效控制。在有源音效控制中,按照发动机转速ne从扬声器16输出模拟发动机声音的音效。据此,例如,能够使车辆12的乘员感到舒适,能够带来加速感。
[0225]
图24是有源声响控制装置10的框图。有源声响控制装置10具有进行有源噪声控制的有源噪声控制部113和进行有源音效控制的有源音效控制部114。有源噪声控制部113的结构使用第1实施方式~第4实施方式中任一实施方式的有源声响控制装置10的结构。有源音效控制部114相当于本发明的音效生成部。
[0226]
有源音效控制部114具有频率检测电路116、谐波信号生成部118、波形存储部120和控制信号生成部122。
[0227]
与第1实施方式的频率检测电路78a同样,频率检测电路116检测振动频率f。谐波信号生成部118生成振动频率f的4倍、5倍或6倍的谐波信号fh。波形存储部120按照每个谐波信号fh存储振幅和相位不同的波形数据。控制信号生成部122根据与谐波信号fh对应的波形数据生成控制信号v0。
[0228]
从有源噪声控制部113输出的控制信号u0与从有源音效控制部114输出的控制信号v0在加法器124中相加。根据控制信号u0和控制信号v0控制扬声器16。据此,从扬声器16输出用于降低噪声的抵消音并且输出模拟发动机声音的音效。
[0229]
[作用效果]本实施方式的有源声响控制装置10具有有源噪声控制部113和有源音效控制部114。据此,能够从扬声器16输出用于降低噪声的抵消音并且输出模拟发动机声音的音效。
[0230]
[变形例]在第1实施方式~第6实施方式中,根据发动机转速ne来检测振动频率f。车辆12的加速度与发动机转速ne之间具有较高的相关性。因此,也可以根据车厢14内的智能手机22的加速度传感器37所检测到的车辆12的加速度来检测振动频率f。
[0231]
发动机转速ne与车辆12的速度也具有较高的相关性。因此,也可以将车厢14内的智能手机22的加速度传感器37所检测到的车辆12的加速度的积分值设为速度,并根据速度来检测振动频率f。
[0232]
〔关于本技术中的计算机的用语〕在本技术中,计算机是指按照给定的步骤自动进行复杂计算的机器。特别是,表示能够使用电子电路等连续地进行数字数据的输入输出、运算、变换等,通过由人等记述提供详细的处理步骤,能够用于各种用途的电气机器。
[0233]
一般而言,在被分类为计算机本身的机器中,有作为面向个人的通用计算机的个人计算机(pc:personal computer,个人电脑)、在企业的信息系统等中使用的作为大规模和高性能计算机的服务器及主机、在科学技术计算等中使用的作为超高性能计算机的超级计算机等。另外,在处理信息、数据的电气机器中以某种形式组装一种计算机的情况也很多。
[0234]
因此,在本技术中,移动电话、智能手机、平板终端等各种通信设备以及录像机、数字电视机、数码照相机、游戏机、车辆控制装置等电子控制的家电产品、产业机器等也包含在计算机中。
[0235]
即,本技术中的计算机由与外部进行数据交换的输入输出装置、记录数据的存储装置、控制程序的执行以及程序的执行状况和各装置的状态的控制装置、进行数据的计算、加工的运算装置等构成。
[0236]
其中,存储装置也可以分为用于临时存储的主存储装置和用于永久记录的外部存储装置(辅助存储装置)。
[0237]
控制装置和运算装置可以集成为一个装置或半导体芯片,将其作为处理装置(或者中央处理装置、cpu、处理器)。
[0238]
计算机的计算步骤是作为数据记录并提供的方式(程序内置方式),将其称为计算机程序或简称为程序。
[0239]
〔关于本技术中的运算处理装置的用语〕运算处理装置是集成了晶体管和半导体元件的装置,是中央处理装置(cpu、微处理器、mpu、processor)。运算处理装置是计算机的主要构成要素之一,是进行其他装置和电路的控制、数据的运算等的装置。运算处理装置是集成了运算装置和控制装置的装置,在现代使用集成在一个ic芯片上的微处理器(mpu:micro-processing unit)。
[0240]
运算处理装置通过总线一个命令一个命令地依次读出(取出)主存储器(ram)中存储的机器语言(machine language)的程序,解释其内容而确定应该进行的动作(解码),驱动内部的电路而实际执行处理。该运算处理装置的内部由进行命令解释或对其他电路的动作指示等的控制单元、进行逻辑运算、算术运算的运算单元(alu:arithmetic and logic unit)、进行数据的暂时存储的寄存器、与外部进行通信的接口电路等构成。
[0241]
另外,为了补偿寄存器和主存储器之间的过大的速度差和容量差,通常内置兼具有两者中间的速度和容量的高速缓冲存储器。
[0242]
〔关于本技术中的主存储装置的用语〕主存储装置也被称为“主存储器”(main memory)、“存储器”(memory)、“ram”。主存储装置通过基板上的电气配线等与中央处理装置(cpu)直接连接。主存储装置是能够根据
cpu的命令立即进行读写的存储装置,保存正在执行的程序代码、目前的处理所需的数据等。主存储装置比外部存储装置(storage;存储设备)的读写动作速度高且二者速度相差悬殊,但主存储装置由于单价高,因此,能够搭载于设备的容量一般要小几位数。
[0243]
在现代计算机中,作为主存储装置(主存储器,main memory)使用的几乎均是作为半导体存储装置(半导体存储器)的ram(random access memory,随机存取存储器)的一种的dram(dynamic ram,动态存储器),其具有当切断设备的电源等停止对装置通电时存储内容就丢失的特性。因此,基本动作是使用存储设备永久存储数据和程序,并且当计算机启动时,读取主存储器所需的程序等并执行该程序。另外,大部分现代cpu产品在其内部具有比dram速度高的被称为“高速缓冲存储器”的存储电路,但它们仅用作提高与dram的数据交换的速度的暂时的存储场所,无法通过程序来明确地控制动作。
[0244]
〔关于本技术中的存储设备的用语〕存储设备也被称为“外部存储装置”、“external storage unit”、“辅助存储装置”。存储设备是计算机的主要部件之一,是用于永久地存储数据的装置。磁盘(硬盘等)、光盘(cd/dvd/blu-ray(注册商标)disc等)、闪存存储装置(usb存储器/存储卡/ssd(固态驱动器)等)、磁带等相当于该存储设备。
[0245]
存储设备一般是指即使不通电也能维持存储内容的存储装置,用于长期固定地保存计算机所利用的程序、数据等的用途。在计算机内,除此之外还内置有通过半导体元件等进行数据存储的主存储装置(主存储器、存储器),在使用者启动程序进行数据的加工时,从储存器中将必要的部分调用到存储器中使用。
[0246]
当在搭载于同一计算机的装置之间进行比较时,存储设备具有比存储器大几位数(几十到几千倍)的存储容量,并且每单位容量的成本小几位数,但读写所需的时间大几位数。
[0247]
[从实施方式获得的技术思想]以下记载能够从上述实施方式掌握的技术思想。
[0248]
一种有源声响控制程序,其利用与服务器(26)进行数据收发的通信设备(22)来下载,并且使运算处理装置(29)执行生成控制信号的处理,其中,所述控制信号用于使设置在所述车厢内的扬声器(16)输出抵消音以降低车辆(12)的车厢(14)内的噪声,所述有源声响控制程序中包括基准信号生成部(52)、自适应陷波滤波器(54)、误差信号输入部(56)、确定部(60)、参照信号生成部(58)和滤波器系数更新部(60),其中,所述基准信号生成部生成与噪声源所产生的所述噪声对应的基准信号;所述自适应陷波滤波器对所述基准信号进行自适应信号处理,并生成所述控制信号;所述误差信号输入部输入误差信号,该误差信号相当于根据所述控制信号从所述扬声器输出的所述抵消音与所述噪声的抵消误差噪声;所述确定部确定车厢内空间中的声音的传递特性,生成修正值;所述参照信号生成部根据所述修正值对所述基准信号进行修正,生成参照信号;所述滤波器系数更新部根据所述误差信号和所述参照信号,对所述自适应陷波滤波器的滤波器系数进行逐次更新以使所述误差信号达到最小。
[0249]
在上述有源声响控制程序中,安装了利用所述通信设备下载的所述有源声响控制程序的装置可以具有麦克风(32),该麦克风检测所述抵消误差噪声,所述确定部确定在从所述扬声器到所述麦克风的传输路径中所述基准信号的频率的声音的传递特性来生成所
述修正值。
[0250]
在上述有源声响控制程序中,安装了利用所述通信设备下载的所述有源声响控制程序的装置可以与所述麦克风(20)连接,该麦克风检测所述抵消误差噪声,所述确定部确定在从所述扬声器到所述麦克风的传输路径中所述基准信号的频率的声音的传递特性来生成所述修正值。
[0251]
在上述有源声响控制程序中,安装了利用所述通信设备下载的所述有源声响控制程序的装置可以具有接受发动机气缸数量信息的输入的发动机气缸数量输入部(35d),并且与用于检测发动机转速的发动机转速获取装置(19)连接,所述基准信号生成部根据所述发动机气缸数量和所述发动机转速生成所述基准信号。
[0252]
在上述有源声响控制程序中,安装了利用所述通信设备下载的所述有源声响控制程序的装置可以具有扬声器数量输入部(35k)和麦克风数量输入部(35m),其中,所述扬声器数量输入部接受所述扬声器的数量的信息的输入;所述麦克风数量输入部接受所述麦克风的数量信息的输入,所述修正值的数量和所述滤波器系数的数量根据所述扬声器的数量和所述麦克风的数量来确定。
[0253]
在上述有源声响控制程序中,安装了利用所述通信设备下载的所述有源声响控制程序的装置可以具有发动机气缸数量输入部和加速度检测部(37),其中,所述发动机气缸数量输入部接受发动机气缸数量的信息的输入;所述加速度检测部检测加速度,所述基准信号生成部根据所述发动机气缸数量和所述加速度来生成所述基准信号。
[0254]
在上述有源声响控制程序中,也可以具有音效生成部(114),该音效生成部根据所述发动机转速生成使所述扬声器输出音效的第2控制信号。
[0255]
在上述有源声响控制程序中,可以使所述运算处理装置作为音效生成部而发挥功能,该音效生成部根据所述加速度或所述车辆的速度生成使所述扬声器输出音效的第2控制信号。
[0256]
一种麦克风,其检测在使所述运算处理装置按照上述有源声响控制程序执行处理时所使用的所述抵消误差噪声,通过有线方式或无线方式与安装了利用所述通信设备下载的所述有源声响控制程序的装置连接,并以能够拆装的方式被安装于所述车厢内。
[0257]
一种发动机转速获取装置(106),其获取在使所述运算处理装置按照上述有源声响控制程序执行处理时所使用的所述发动机转速,通过有线方式或无线方式与所述装置连接,并以能够拆装的方式被安装于所述车厢内。[附图标记说明]
[0258]
12:车辆;14:车厢;16:扬声器;20、32:麦克风;18:发动机(噪声源);19:发动机转速传感器(发动机转速获取装置);22:智能手机(通信设备);26:服务器;29:运算处理装置;35d:发动机气缸数量输入部;35k:扬声器数量输入部;35m:麦克风数量输入部;37:加速度传感器(加速度检测部);52:基准信号生成部;54:控制信号生成部(自适应陷波滤波器);56:误差信号输入部;58:参照信号生成部;60:控制滤波器系数更新部(滤波器系数更新部、确定部);106:车辆信息获取装置(发动机转速获取装置);114:有源音效控制部(音效生成部)。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。