1.本发明涉及医疗器械辅助领域,具体涉及一种七自由度经会阴前列腺手术导航系统及其使用方法。
背景技术:
2.经会阴前列腺切除术创伤较轻,对全身影响小,术后死亡率低,特别适合全身情况差的老年病人。但会阴部解剖复杂,手术操作比较困难,容易发生直肠损伤,造成尿道直肠瘘或会阴直肠瘘,术后性功能障碍发生率高。因此,近年来经会阴前列腺切除术应用较少。
3.当前市场现状中主要存在的假阴性出阳率低造成漏诊、盲穿过渡诊断多次伤害、经直肠穿刺感染率极高等临床需求。技术层面主要在于用于前列腺手术中的核磁共振影像不具有实时性,患者姿态和时间对前列腺形态的影响无法得知;超声影像对前列腺中可疑病灶的显像效果不佳,难以找到可疑病灶位置。现有技术中对前列腺大多采用系统穿刺,而对于核磁影像已找到可疑病灶的情况由人工预估所在区域后经意识融合穿刺,总体误差较大,易漏诊与多次伤害;相对简易的穿刺方法-经直肠穿刺能提供更准确的穿刺,但患者感染风险大大增加,经会阴穿刺的目标点难以把控。
4.例如[中国发明] cn201910340126.6 经尿道前列腺手术机器人切除系统 ,此方法使用机械臂进行定位,成本较高且占用空间大,手术时使用的数据为术前采集,不具有实时性,具有因位姿变化或受力变形而导致的较大的手术风险。
[0005]
[中国发明] cn202110590996.6 基于超声图像引导的前列腺活检穿刺机器人,此方法仅可用于平行与超声探头的方向进针穿刺。
技术实现要素:
[0006]
发明目的:提供一种七自由度经会阴前列腺手术导航系统,并进一步提供一种基于上述七自由度经会阴前列腺手术导航系统的使用方法,以解决现有技术存在的上述问题。
[0007]
技术方案:一种七自由度经会阴前列腺手术导航系统,包括超声探查机构和穿刺轴机构两个部分组成。
[0008]
其中,超声探查机构包括基座组件、移动组件和探头卡位组件三个组成部分;所述基座组件用于对所述超声探查机构整体进行活动空间的限定;所述移动组件置于所述基座组件工作面表面,并与所述基座组件连接,用于调整所述超声探查机构的整体作业位置;所述探头卡位组件贯穿过所述移动组件,用于对作业过程中的超声探头进行固定。
[0009]
穿刺轴机构包括旋转调节组件和穿刺进给组件两个组成部分;所述旋转调节组件用于对所述穿刺轴机构的整体进行位置的限定;所述穿刺进给组件与所述旋转调节组件连接, 用于进行穿刺给针作业。
[0010]
所述超声探查机构与所述穿刺轴机构通过转动臂相互连通。
[0011]
在进一步的实施例中,所述基座组件包括基板和进给轴两个部分。所述基板用于
所述基座组件的整体定位和各个部件的承载;所述进给轴置于所述基板工作面表面,用于为所述移动组件的调整提供预定的操作空间。
[0012]
在进一步的实施例中,所述移动组件包括滑动板和限位板两个组成部分。所述滑动板滑动连接于所述进给轴工作面的表面,具有沿所述进给轴工作面表面进行往复滑动的灵活度;所述限位板连接于所述滑动板的另一面表面,具有跟随所述滑动板的移动而移动的灵活度;且所述限位板表面是设有开放式通孔,超声可贯穿过所述通孔进行固定。
[0013]
在进一步的实施例中,所述探头卡位组件包括同步轮、轴承座和快装机构三个组成部分;所述同步轮贯穿过所述限位板表面的开放式通孔,且两端均延伸出所述开放式通孔;所述轴承座置于所述同步轮的一端处,用于在后期作业过程中对超声探头进行固定;所述快装机构一端与所述轴承座的另一端连接,用于在后期的作业过程中对超声探头进行更换。
[0014]
在进一步的实施例中,所述旋转调节组件包括基柱、旋转臂和旋转盘三个组成部分。所述基柱一端与所述转动臂连接,用于所述旋转调节组件与所述转动臂之间的相互连通;所述旋转臂一端与所述基柱的另一端轴接,具有绕与所述基柱的连接点进行全方位转动的灵活度;所述旋转盘置于所述旋转臂的另一端处,且一面与所述旋转臂轴接,具有绕与所述旋转臂的连接点进行全方位转动的灵活度。
[0015]
在进一步的实施例中,所述穿刺进给组件包括穿刺进给轴、导向套和进针限定座三个组成部分。所述穿刺进给轴置于所述旋转盘的另一面表面,用于为穿刺针的移动提供预定的滑动范围;所述导向套置于所述穿刺进给轴的一端,且所述导向套表面设有开放式通孔,穿刺针可通过所述通孔贯穿过所述导向套;所述进针限定座滑动连接于所述穿刺进给轴工作面的表面,具有沿所述穿刺进给轴工作面表面进行往复滑动的灵活度。
[0016]
在进一步的实施例中,所述快装机构包括支座和快装盖两个组成部分。所述支座置于所述轴承座的另一端处,且一端与所述轴承座连接,用于对超声探头进行承托;所述快装盖置于所述支座远离所述轴承座的一端处,且所述快装盖具有预定的弯折弧度,并覆盖过所述支座,与所述支座形成具有预定收容性的通孔,超声探头可贯穿过所述通孔进行固定。
[0017]
在进一步的实施例中,所述转动臂包括大臂和小臂两个组成部分。所述大臂一端与所述基板连接,用于调节所述超声探查机构的整体位置;所述小臂一端与所述基柱连接,用于调节所述穿刺轴机构的整体位置,且所述小臂设有预定的弯曲弧度;所述大臂的另一端与所述小臂的另一端轴接,使得所述大臂与所述小臂可绕连接点进行全方位的角度调节。
[0018]
一种七自由度经会阴前列腺手术导航系统的使用方法,包括以下步骤:s1、使超声探头依次贯穿过支座与快装盖所形成的通孔和限位板表面的通孔,将超声探头固定住;s2、使限位板沿进给轴工作面表面进行往复滑动,以调整超声探头的位置,使超声探头进入到病灶区进行探查;s3、完成病灶区的探测后,使大臂、小臂绕连接点进行转动,调整穿刺轴机构的整体位置;将穿刺针通过进针限定座贯穿过导向套表面的通孔进行固定;s4、转动旋转臂及旋转盘对穿刺针的进针角度进行调整;完成后使进针限位座沿
穿刺进给轴工作面表面进行滑动,以调整穿刺针的进针深度;s5、当需要进行下一病灶点的穿刺给针时,依次重复s3至s4工作,直到完成穿刺作业为止。
[0019]
一种七自由度经会阴前列腺手术导航系统的另一使用方法,包括以下步骤:s01、使超声探头依次贯穿过支座与快装盖所形成的通孔和限位板表面的通孔,将超声探头固定住;s02、使限位板沿进给轴工作面表面进行往复滑动,以调整超声探头的位置,使超声探头进入到病灶区进行探查;s03、完成病灶区的探测后,使所述进针限定沿所述穿刺进给轴工作面表面向远离所述导向套的方向处移动,提供预定的人工操作空间;人工通过所述导向套表面的通孔将针道针送入病灶区,完成所述针道针的穿刺作业;s04、所述进针限定座再次沿所述穿刺进给轴工作面表面向靠近所述导向套的方向移动,而后所述穿刺针沿所述进针限定座向靠近所述针道针的方向进行进针作业,并贯穿过所述针道针;当所述穿刺针的握持端抵住所述进针限定座时即判定所述穿刺针穿刺到位;s05、 完成穿刺作业后,使得所述穿刺针向远离所述进针限定座的方向进行拔除; 将所述针道针滞留于患者体内,并基于下一针的目标位置,控制所述大臂、小臂、旋转臂与所述旋转盘对所述针道针进行姿态调整,使得所述针道针绕入针点运动,并与下一针的目标位置共线;s06、依次重复上述穿刺作业步骤,完成同一入针点的多针穿刺作业,直到所要进行穿刺的穿刺针全部穿刺完毕为止;s07、将所述穿刺针拔出后,所述进针限定座再次沿所述穿刺进给轴工作面表面向远离所述导向套的方向滑动,人工将所述针道针进行手工拔除。
[0020]
有益效果:本发明涉及一种七自由度经会阴前列腺手术导航系统及其使用方法,由超声探查机构和穿刺轴机构两个部分组成,且所述超声探查机构与所述穿刺轴机构均具有多个自由度。使得本发明所涉及的前列腺手术导航系统可应用于一至多个自定义位置的入针点的穿刺,且可支持有针道穿刺和无针道穿刺两种方法。同时,本发明所设超声探查机构可提供实时的核磁共振影像,使得患者在任何姿态和时间段下的前列腺形态均能掌握与了解。本发明所设穿刺轴机构设有穿刺进给轴,可对穿刺针的给进深度进行灵活的掌控,也使得穿刺针的针长得以充分的利用。
附图说明
[0021]
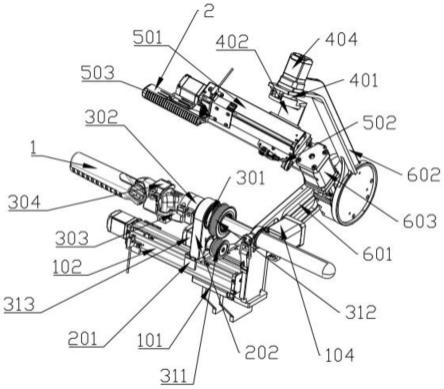
图1为本发明整体的示意图。
[0022]
图2为本发明所述减速装置的整体示意图。
[0023]
图3为本发明所述旋转调节组件的整体示意图。
[0024]
图4为本发明所述旋转调节组件的另一角度整体示意图。
[0025]
图5为本发明所述超声探查机构的整体示意图。
[0026]
图中各附图标记为:超声探头1、穿刺针2、基板101、进给轴102、滑动电机103、调节电机104、滑动板201、限位板202、同步轮301、同步传动轮311、同步转动轮312、超声旋转电
机313、轴承座302、支座303、快装盖304、基柱401、旋转臂402、旋转盘403、穿刺旋转电机404、穿刺进给轴501、导向套502、进针限定座503、大臂601、小臂602、驱动电机603、限位柱701、光电挡块702、零位识别板703、可选安装孔704、针道针8。
具体实施方式
[0027]
在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
[0028]
申请人认为,现存的经会阴前列腺手术用核磁共振影像不具有实时性,患者姿态和时间对前列腺形态的影响无法得知;超声影像对前列腺中可疑病灶的显像效果不佳,难以找到可疑病灶位置。且现有技术中的穿刺方法-经直肠穿刺能提供更准确的穿刺,但患者感染风险大大增加,经会阴穿刺的目标点难以把控。
[0029]
为此,申请人设计一种七自由度经会阴前列腺手术导航系统及其使用方法,由超声探查机构和穿刺轴机构两个部分组成,且所述超声探查机构与所述穿刺轴机构均具有多个自由度。使得本发明所涉及的前列腺手术导航系统可应用于一至多个自定义位置的入针点的穿刺,且可支持有针道穿刺和无针道穿刺两种方法。同时,本发明所设超声探查机构可提供实时的核磁共振影像,使得患者在任何姿态和时间段下的前列腺形态均能掌握与了解。本发明所设穿刺轴机构设有穿刺进给轴501,可对穿刺针2的给进深度进行灵活的掌控,也使得穿刺针2的针长得以充分的利用。
[0030]
本发明涉及的七自由度经会阴前列腺手术导航系统主要包括超声探查机构和穿刺轴机构两个组成部分。其中,超声探查机构包括基座组件、移动组件和探头卡位组件三个组成部分;所述基座组件用于对所述超声探查机构整体进行活动空间的限定;所述移动组件置于所述基座组件工作面表面,并与所述基座组件连接,用于调整所述超声探查机构的整体作业位置;所述探头卡位组件贯穿过所述移动组件,用于对作业过程中的超声探头1进行固定。穿刺轴机构包括旋转调节组件和穿刺进给组件两个组成部分;所述旋转调节组件用于对所述穿刺轴机构的整体进行位置的限定;所述穿刺进给组件与所述旋转调节组件连接,用于进行穿刺给针作业。所述超声探查机构与所述穿刺轴机构通过转动臂相互连通。
[0031]
进一步优选的实施方式中,所述基座组件包括基板101和进给轴102两个部分。所述基板101用于所述基座组件的整体定位和各个部件的承载;所述进给轴102置于所述基板101工作面表面,并与所述基板101连接,用于为所述移动组件的调整提供预定的操作空间。
[0032]
进一步优选的实施方式中,所述移动组件包括滑动板201和限位板202两个组成部分。所述滑动板201置于所述进给轴102工作面的表面,且一面与所述进给轴102滑动连接,具有沿所述进给轴102工作面表面进行往复滑动的灵活度;所述限位板202置于所述滑动板201的另一面表面,且一端与所述滑动板201连接,具有跟随所述滑动板201的移动而移动的灵活度;且所述限位板202表面是设有开放式通孔,超声可贯穿过所述通孔进行固定。在后期的作业过程中,可通过所述滑动板201沿所述进给轴102工作面表面的滑动带动所述限位板202的移动,进而完成对超声探头1的作业位置的调整。且所述进给轴102远离所述基板101的一端处设有滑动电机103,在后期作业过程中,所述滑动电机103驱动所述滑动板201
沿所述进给轴102工作面表面进行往复滑动。
[0033]
进一步优选的实施方式中,所述探头卡位组件包括同步轮301、轴承座302和快装机构三个组成部分;所述同步轮301贯穿过所述限位板202表面的开放式通孔,且两端均延伸出所述开放式通孔;所述轴承座302置于所述同步轮301的一端处,且一端与所述同步轮301连接,用于在后期作业过程中对超声探头1进行固定;所述快装机构一端与所述轴承座302的另一端连接,用于在后期的作业过程中对超声探头1进行更换。所述同步轮301的另一端设有同步转动轮312;所述同步转动轮312与所述同步轮301连接,所述同步轮301具有跟随所述同步转动轮312的转动而转动的灵活度;所述同步转动轮312工作面方向下方设有同步传动轮311,且所述同步传动轮311通过超声旋转电机313进行启动旋转;所述超声旋转电机313贯穿过所述限位板202与所述同步传动轮311连通;所述同步传动轮311与所述同步转动轮312啮合。在后期作业过程中,所述超声旋转电机313带动所述同步传动轮311进行旋转,进而带动所述同步转动轮312的转动,进而带动所述同步轮301的旋转;所述同步轮301带动所述轴承座302与所述快装机构的转动,完成对超声探头1的作业角度调整。
[0034]
进一步优选的实施例方式中,所述旋转调节组件包括基柱401、旋转臂402和旋转盘403三个组成部分。所述基柱401一端与所述转动臂连接,用于所述旋转调节组件与所述转动臂之间的相互连通;所述旋转臂402一端与所述基柱401的另一端轴接,具有绕与所述基柱401的连接点进行全方位转动的灵活度;所述旋转盘403置于所述旋转臂402的另一端处,且一面与所述旋转臂402轴接,具有绕与所述旋转臂402的连接点进行全方位转动的灵活度。在后期的作业过程中通过所述旋转臂402与所述旋转盘403的旋转带动所述穿刺进给组件的整体位置和作业角度的调节。
[0035]
进一步优选的实施方式中,所述穿刺进给组件包括穿刺进给轴501、导向套502和进针限定座503三个组成部分。所述穿刺进给轴501置于所述旋转盘403的另一面表面,且一侧面与所述旋转盘403连接,用于为穿刺针2的移动提供预定的滑动范围;所述导向套502置于所述穿刺进给轴501的一端,且所述导向套502表面设有开放式通孔,穿刺针2可通过所述通孔贯穿过所述导向套502;所述进针限定座503滑动连接于所述穿刺进给轴501的另一端处,具有沿所述穿刺进给轴501工作面表面进行往复滑动的灵活度。在后期的作业过程中,所述进针限定座503沿所述穿刺进给轴501工作面表面进行滑动带动所述穿刺针2的移动,并在所述导向套502的引导下,使得穿刺针2插入预定的病灶区。同时,所述进针限定座503沿所述穿刺进给轴501工作面表面的滑动,可使穿刺针2的入针深度进行灵活的调节。
[0036]
进一步优选的实施方式中,所述快装机构包括支座303和快装盖304两个组成部分。所述支座303置于所述轴承座302的另一端处,且一端与所述轴承座302连接,用于对超声探头1进行承托;所述快装盖304置于所述支座303远离所述轴承座302的一端处,且所述快装盖304具有预定的弧度,并覆盖过所述支座303,与所述支座303形成具有预定收容性的通孔,超声探头1可贯穿过所述通孔进行固定。所述快装盖304一端与所述支座303螺栓连接,具有绕与所述支座303的连接点进行转动的灵活度;另一端与所述支座303卡位固定。在后期的作业过程中,可通过所述快装盖304的转动完成超声探头1的更换;且所述支座303与所述快装盖304与超声接触面表面设有防滑螺纹,可使超声固定,具有跟随所述支座303与所述快装盖304的转动而转动的灵活度。
[0037]
进一步优选的实施方式中,所述转动臂包括大臂601和小臂602两个组成部分。所
述大臂601一端与所述基板101连接,用于调节所述超声探查机构的整体位置;所述小臂602一端与所述基柱401连接,用于调节所述穿刺轴机构的整体位置,且所述小臂602设有预定的弯曲弧度;所述大臂601的另一端与所述小臂602的另一端轴接,使得所述大臂601与所述小臂602可绕连接点进行全方位的角度调节。所述大臂601与所述小臂602的连接处设有驱动电机603,在后期的作业过程中,通过所述驱动电机603带动所述大臂601与所述小臂602之间的转动调节。所述小臂602与所述基柱401的连接端处设有穿刺旋转电机404,在后期的作业过程中,通过所述穿刺旋转电机404的驱动带动所述旋转臂402与所述旋转盘403的转动。
[0038]
进一步优选的实施方式中,所述大臂601与所述基板101为轴接,所述大臂601与所述基板101的连接点具有进行全方位转动的灵活度;所述大臂601与所述基板101的连接端设有调节电机104,在后期的作业过程中可通过所述调节电机104控制的驱动完成所述大臂601与所述基板101之间的角度位置调节。且所述大臂601与所述基板101的连接处,及所述大臂601与所述小臂602的连接处均设置减速装置。所述减速装置包括限位柱701、光电挡块702和零位识别板703组成;所述大臂601与所述基板101和所述小臂602的连接处表面均设有可选安装孔704,且所述可选安装孔704为多个。所述光电挡块702一面设有与所述可选安装孔704相适配的安插柱,并通过所述安插柱与所述大臂601连接;所述零位识别板703置于所述光电挡块702的另一面处,且一面与所述光电挡块702轴接,具有绕与所述光电挡块702连接进行转动的灵活度;所述限位柱701置于所述零位识别板703的另一面处,且一面与所述零位识别板703轴接;所述限位柱701的另一面与所述小臂602或所述基板101连接。在后期作业过程中,所述光电挡块702挡住所述零位识别板703,当其相互脱离时认为其到达行程终点,若发生意外情况导致运动超过行程终点,则可由所述限位柱701挡住所述光电挡块702的运动,进而强制制动。所述光电挡块702可更换不同长度以应用不同行程,可更换不同安装孔以应用不同的起始角度。以此完成对所述大臂601、小臂602、超声探查机构和所述穿刺轴机构之间的可调行程范围的进一步限定。
[0039]
在上述七自由度经会阴前列腺手术导航系统的基础之上,本发明提出一种七自由度经会阴前列腺手术导航系统的使用方法,具体步骤如下:首先,使超声探头1依次贯穿过所述支座303与所述快装盖304所形成的通孔和所述限位板202表面的通孔,将超声探头1固定住。
[0040]
接着,使所述限位板202沿所述进给轴102工作面表面进行往复滑动,以调整超声探头1的位置,使超声探头1进入到病灶区进行探查;当需要对超声探头1所探查的病灶角度进行调节时,可通过旋转所述同步传动轮311带动所述同步转动轮312进而带动所述同步轮301的转动,进而完成对超声探头1的探查角度的调节。
[0041]
随后,完成病灶区的探测后,使所述大臂601、小臂602绕连接点进行转动,调整所述穿刺轴机构的整体位置;将穿刺针2通过所述进针限定座503贯穿过所述导向套502表面的通孔进行固定;转动所述旋转臂402及所述旋转盘403对穿刺针2的进针角度进行进一步的调整;完成后使所述进针限位座503沿所述穿刺进给轴501工作面表面进行滑动,以调整穿刺针2的进针深度;当需要进行下一病灶点的穿刺给针时,依次重复上述所述穿刺轴机构的调节作业
步骤,完成对穿刺针2的多角度进针位置的调整,直到完成穿刺作业为止。
[0042]
在上述七自由度经会阴前列腺手术导航系统的基础之上,本发明提出另一种七自由度经会阴前列腺手术导航系统的使用方法,具体步骤如下:首先,使超声探头1依次贯穿过所述支座303与所述快装盖304所形成的通孔和所述限位板202表面的通孔,将超声探头1固定住。
[0043]
接着,使所述限位板202沿所述进给轴102工作面表面进行往复滑动,以调整超声探头1的位置,使超声探头1进入到病灶区进行探查;当需要对超声探头1所探查的病灶角度进行调节时,可通过旋转所述同步传动轮311带动所述同步转动轮312进而带动所述同步轮301的转动,进而完成对超声探头1的探查角度的调节。
[0044]
随后,完成病灶区的探测后,使所述进针限定座503沿所述穿刺进给轴501工作面表面向远离所述导向套502的方向处移动,使得所述导向套502、进针限定座503和所述穿刺进给轴501所形成的给针空间扩大,提供预定的人工操作空间;而后人工通过所述导向套502表面的通孔将针道针8送入病灶区,用于辅助单入针点的多针穿刺作业。完成所述针道针8的穿刺作业后,所述进针限定座503再次沿所述穿刺进给轴501工作面表面向靠近所述导向套502的方向移动,以调整所述进针限定座503与所述针道针8之间的距离,而后所述穿刺针2 沿所述进针限定座503向靠近所述针道针8的方向移动进行进针作业,并贯穿过所述针道针8到达相应的病灶区进行穿刺作业;当所述穿刺针2的握持端抵住所述进针限定座503时,即可判定为所述穿刺针2穿刺到位。
[0045]
当下一针为入针点不变,目标点变动时,可先将所述穿刺针2向远离所述进针限定座503的方向进行所述穿刺针的拔除,并将所述针道针8滞留于患者体内, 而后基于下一针的目标位置,控制所述大臂601、小臂602、旋转臂402与所述旋转盘403对所述针道针8进行姿态调整,使得所述针道针8绕入针点运动,并与下一针的目标位置共线.。
[0046]
最后,依次重复上述穿刺针2的穿刺作业步骤,完成同一入针点的多针穿刺作业,直到所要进行穿刺的穿刺针2全部穿刺完毕为止。将所述穿刺针2拔出后,所述进针限定座503再次沿所述穿刺进给轴501工作面表面向远离所述导向套502的方向滑动,人工将所述针道针8进行手工拔除即可。
[0047]
当进行人工穿刺给针作业时,所述大臂601与所述小臂602及所述基板101之间通过所述减速装置使得三者之间的位置固定,进而使得所述超声探查机构固定,无需在进行穿刺给针作业的同时再兼顾超声探头1的成像区域问题。
[0048]
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。