1.本技术属于园艺工具领域,特别涉及一种割草机及割草机的控制方法。
背景技术:
2.割草机可以用来执行割草任务,修剪草坪,保持草坪的整洁。现有技术的割草机包括带翻边的旋刀,带翻边的旋刀在旋转时可以通过翻边形成上升气流,使草向上运动,从而被多次切割。但是带翻边的旋刀的旋转时阻力大,能耗高。如果旋刀没有翻边,虽然也可以将草切断,但是切断的草长度较长,容易缠绕,导致电机堵转。
技术实现要素:
3.本技术旨在提出一种方便切割长度较长的草的割草机及割草机的控制方法。
4.本技术提出一种割草机,所述割草机包括:
5.至少一个第一切割单元,所述第一切割单元被配置为在第一高度上形成第一切割区域;以及
6.至少一个第二切割单元,所述第二切割单元与所述第一切割单元沿所述割草机的长度方向设置,且所述第二切割单元被配置为在第二高度上形成第二切割区域;
7.其中,所述第一高度与所述第二高度不同。
8.优选地,所述第二切割单元与所述第一切割单元沿所述割草机的长度方向间隔设置。
9.优选地,所述第一切割单元设置有多个,多个所述第一切割单元沿所述割草机的宽度方向布置,多个所述第一切割单元的所述第一切割区域的高度相同;和/或,
10.所述第二切割单元设置有多个,多个所述第二切割单元沿所述割草机的宽度方向布置,多个所述第二切割单元的所述第二切割区域的高度相同。
11.优选地,相邻的所述第一切割单元的所述第一切割区域沿所述割草机的长度方向在垂直于所述割草机的长度方向的平面上的投影具有重叠的部分;
12.相邻的所述第二切割单元的所述第二切割区域沿所述割草机的长度方向在垂直于所述割草机的长度方向的平面上的投影具有重叠的部分。
13.优选地,所述第一切割单元包括第一刀盘以及多组第一刀片,其中各组所述第一刀片沿所述割草机的高度方向间隔安装于所述第一刀盘;
14.所述第二切割单元包括第二刀盘以及多组第二刀片,其中各组所述第二刀片沿所述割草机的高度方向间隔安装于所述第二刀盘。
15.优选地,在沿所述割草机的高度方向远离地面的方向上,每组所述第一刀片的切割半径逐渐增大,每组所述第二刀片的切割半径逐渐增大。
16.优选地,所述第一切割单元被配置为能够沿所述割草机的高度方向调节安装高度地安装于所述割草机的壳体和/或机架;
17.所述第二切割单元被配置为能够沿所述割草机的高度方向调节安装高度地安装
于所述割草机的壳体和/或机架。
18.优选地,所述割草机还包括用于驱动第一切割单元的第一驱动单元,以及用于驱动第二切割单元的第二驱动单元;或者,
19.所述割草机还包括驱动装置,所述驱动装置包括离合器,用以择一或同时驱动所述第一切割单元和所述第二切割单元。
20.本技术还提出一种割草机,所述割草机包括:
21.至少一个第一切割单元,所述第一切割单元被配置为在第一高度上形成第一切割区域;以及
22.至少一个第二切割单元,所述第二切割单元与所述第一切割单元沿所述割草机的宽度方向设置,且所述第二切割单元被配置为在第二高度上形成第二切割区域;
23.其中,所述第一高度与所述第二高度不同。
24.优选地,沿所述割草机的长度方向(x),所述第一切割区域(s1)的轴线在垂直于所述割草机的长度方向(x)的平面上具有第一投影,所述第二切割区域(s2)的轴线在垂直于所述割草机的长度方向(x)的平面上具有第二投影;其中,所述第一投影距所述第二投影的垂直距离小于或等于所述第一切割区域(s1)和所述第二切割区域(s2)的半径之和。
25.优选地,所述第一切割单元被配置为能够沿所述割草机的高度方向调节安装高度地安装于所述割草机的壳体和/或机架;
26.所述第二切割单元被配置为能够沿所述割草机的高度方向调节安装高度地安装于所述割草机的壳体和/或机架。
27.本技术又提出一种如上述技术方案中任一项所述的割草机的割草机的控制方法,
28.获取待切割区域的草高;
29.判断所述待切割区域的草高是否大于或等于预设草高,若是,则控制所述第一切割单元和所述第二切割单元同时工作;若否,则控制所述第一切割单元或所述第二切割单元工作。
30.优选地,所述待切割区域的草高包括所述待切割区域的平均草高或最大草高。
31.通过采用上述技术方案,通过在割草机的长度方向上设置高度不同的第一切割单元和第二切割单元,使割草机进行单次行走,便可使行走路径沿途较长的草在不同高度上被切割,进而将草切短、切碎,且行走路径中无重复路径,可以在保证切割效果的同时大大节省切割时间。
32.通过采用上述技术方案,通过在割草机的宽度方向上设置高度不同的第一切割单元和第二切割单元,使割草机在预定区域内按照规划的路径进行单次行走,便可使预定区域内较长的草在不同高度上被切割,进而将草切短、切碎,且行走路径中无重复路径,可以在保证切割效果的同时大大节省切割时间。
33.通过使用上述割草机的控制方法,可以选择工作模式,根据待切割区域的草高,控制仅第一切割单元或第二切割单元工作,从而降低能耗。
附图说明
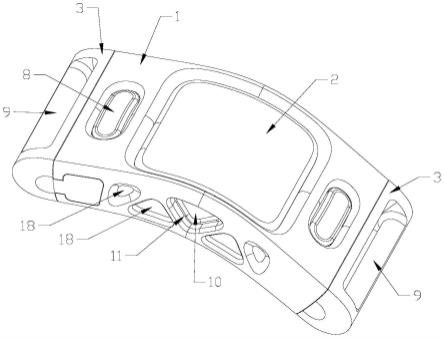
34.图1示出了根据本技术的第一实施方式的割草机的结构示意图。
35.图2示出了根据本技术的第一实施方式的割草机的仰视图。
36.图3示出了根据本技术的第二实施方式的割草机的仰视图。
37.图4示出了根据本技术的第三实施方式的割草机的仰视图。
38.图5示出了根据本技术的第四实施方式的割草机的仰视图。
39.图6示出了根据本技术的第三实施方式的割草机的工作路径示意图。
40.附图标记说明
41.1壳体
42.2行走轮
43.3第一切割单元 31第一电机 32第一刀盘 33第一刀片
44.4第二切割单元 41第二电机 42第二刀盘 43第二刀片
45.s1第一切割区域
46.s2第二切割区域
47.x长度方向 y宽度方向 z高度方向。
具体实施方式
48.为了更加清楚地阐述本技术的上述目的、特征和优点,在该部分结合附图详细说明本技术的具体实施方式。除了在本部分描述的各个实施方式以外,本技术还能够通过其他不同的方式来实施,在不违背本技术精神的情况下,本领域技术人员可以做相应的改进、变形和替换,因此本技术不受该部分公开的具体实施例的限制。本技术的保护范围应以权利要求为准。
49.现有技术的割草机,在使用带翻边的旋刀的情况下,切割长度较长的草虽然切割效果较好但是能耗较高,而使用没有翻边的旋刀,虽然能耗较低,但是容易发生缠绕,导致电机堵转。
50.基于上述问题,如图1至图3所示,本技术提出一种割草机,其包括至少一个第一切割单元3和至少一个第二切割单元4,第一切割单元3和第二切割单元4分别用于对草进行切割。第一切割单元3被配置为在第一高度上形成第一切割区域s1,第一切割单元3能够对进入第一切割区域s1的草进行切割。第二切割单元4被配置为在第二高度上形成第二切割区域s2,第二切割单元4能够对进入第二切割区域s2的草进行切割。其中,第一切割单元3与第二切割单元4沿割草机的长度方向x设置,且第一高度与第二高度不同。
51.割草机工作时,可控制割草机沿割草机的长度方向x进行单次行走,便可使行走路径沿途较长的草在不同高度上被第一切割单元3和第二切割单元4切割,进而将草切短、切碎,且行走路径中无重复路径,可以在保证切割效果的同时大大节省切割时间。
52.在一种可能的实施方式中,如图1所示,第一切割单元3位于第二切割单元4的前侧,通常情况下,割草机的万向轮所在侧表现为割草机的前侧,即图1至图3中的左侧是割草机的前侧。在割草机的高度方向z上,第二切割区域s2位于第一切割区域s1的下方,即第二切割区域s2距地面的距离小于第一切割区域s1距地面的距离。第二切割区域s2可以完全位于第一切割区域s1的下方,第二切割区域s2也可以部分地位于第一切割区域s1的下方,从而使第一切割区域s1和第二切割区域s2沿割草机的长度方向x在垂直于割草机的长度方向x的平面上的投影具有重叠的部分。
53.通过在割草机的长度方向x上设置高度不同的第一切割单元3和第二切割单元4,
在割草机沿割草机的长度方向x向前单次行走时(如单次直线行走),对于行走路径沿途的同一区域,较长的草可以先被第一切割单元3切短,再由第二切割单元4进行切割作业,从而将较长的草进一步切短。如此,可以使预定区域内较长的草被多次切割,以将草切短碎、切碎短,且行走路径中无重复路径,从而可以在保证切割效果的同时大大节省切割时间。
54.在一种可能的实施方式中,如图2所示,第一切割单元3和第二切割单元4沿割草机的长度方向x间隔设置,即第一切割区域s1和第二切割区域s2沿割草机的高度方向z在地面上的投影没有重叠的部分,从而在切割时便于排草,使切断的草容易落到地面上。
55.在一种可能的实施方式中,如图2所示,第一切割单元3可以设置有多个,多个第一切割单元3沿割草机的宽度方向y布置,多个第一切割单元3的第一切割区域s1的高度相同,使多个第一切割区域s1在割草机的高度方向z上处于相同的高度;和/或第二切割单元4可以设置有多个,多个第二切割单元4沿所述割草机的宽度方向y布置,多个第二切割单元4的第二切割区域s2的高度相同。可选的,如图2所示,第一切割单元3和第二切割单元4均沿y方向设置有两个。可选的,如图3所示,第一切割单元3和第二切割单元4均沿y方向设置有三个。通过将多个第一切割单元3和/或多个第二切割单元4沿割草机的宽度方向y布置,可使第一切割区域s1和/或第二切割区域s2在割草机的宽度方向y上覆盖较宽的区域,从而增加切割区域的宽度;另外,多个第一切割单元3的第一切割区域s1的高度相同,可使多个第一切割区域s1在割草机的高度方向z上处于相同的高度,多个第二切割单元4的第二切割区域s2的高度相同,可使多个第二切割区域s2在割草机的高度方向z上处于相同的高度,从而有利于提高草坪的切割平整度。
56.在另一种可能的实施方式中,第一切割区域s1和第二切割区域s2沿割草机的高度方向z在地面上的投影具有部分的重叠区域,从而可充分利用割草机的底盘空间,使多个切割单元布置紧凑,排布适当数量的第一切割单元3和第二切割单元4。技术人员可根据实际情况选择第一切割单元3和第二切割单元4的数量,本技术对此不作限制。
57.在一种可能的实施方式中,如图2所示,相邻的第一切割单元3的第一切割区域s1沿割草机的长度方向x在垂直于割草机的长度方向x的平面上的投影具有重叠的部分,例如二者可以略微重叠,如此相邻两个第一切割区域s1沿割草机的长度方向x延伸形成的长条形区域具有重叠的部分。相邻的第二切割单元4的第二切割区域s2沿割草机的长度方向x在垂直于割草机的长度方向x的平面上的投影具有重叠的部分,例如二者可以略微重叠,如此相邻两个第二切割区域s2沿割草机的长度方向x延伸形成的长条形区域具有重叠的部分。在割草机沿割草机的长度方向x行走时,第一切割单元3可以切割到相邻两个第一切割区域s1之间的部分的草坪,第二切割单元4可以切割到相邻两个第二切割区域s2之间的部分的草坪。通过上述方式,可在增大割草机的割草宽度的同时防止漏切割相邻两个第一切割单元3和相邻两个第二切割单元4之间的部分。可理解的,多个第一切割单元3的第一切割区域s1沿割草机的高度方向z的投影也可以不重叠,从而在切割时便于排草,使切断的草容易落到地面上。
58.在一种可能的实施方式中,如图1所示,第一切割单元3包括第一电机31、第一刀盘32以及多组第一刀片33,其中各组第一刀片33沿割草机的高度方向z间隔安装于第一刀盘32。第二切割单元4包括第二电机41、第二刀盘42以及多组第二刀片43,其中各组第二刀片43沿割草机的高度方向z间隔安装于第二刀盘42。第二切割单元4与第一切割单元3的安装
位置不同,二者的具体结构可以相同,因此在下面仅详细介绍第一切割单元3的具体结构,对于第二切割单元4的具体结构不再赘述。
59.可选的,第一刀盘32连接于第一电机31的输出轴,第一电机31可以驱动第一刀盘32旋转。可以理解,第一刀盘32可以但不限于经由适当的减速机构连接于第一电机31的输出轴。第一刀片33安装于第一刀盘32。第一电机31的输出轴沿割草机的高度方向z延伸,第一刀盘32带动第一刀片33在水平面内转动时,第一刀片33在第一高度上形成环形的第一切割区域s1,第一切割单元3能够对进入第一切割区域s1的草进行切割。在割草机沿其长度方向x行走时,可以在长条形的区域内切割草坪。
60.第一刀片33可以安装于第一刀盘32的周缘部分,第一刀盘32安装了多组第一刀片33,例如第一刀盘32可以安装3组第一刀片33。3组第一刀片33沿割草机的高度方向z间隔开地设置,各组第一刀片33可以用于切割高度不同的草,或者说切割草的不同高度位置。
61.由于第一切割单元3和第二切割单元4均具有沿割草机的高度方向错开的多组刀片,割草机单次通过预定区域,就可以使预定区域内较长的草被多次切割。对草多次切割将草切碎可以使电机不容易堵转,单次通过预定区域就可以完成多次切割,将草切碎、切短,工作效率较高。
62.在一种可能的实施方式中,在沿割草机的高度方向z远离地面的方向上,每组第一刀片33的切割半径逐渐增大,每组第二刀片43的切割半径逐渐增大。以图1所示为例,在多组第一刀片33中,位于上方的第一刀片33的工作半径大于位于下方的第一刀片33的工作半径;位于上方的第一刀片33沿第一刀盘32的径向的尺寸大于位于下方的第一刀片33沿第一刀盘32的径向的尺寸。在第一刀盘32旋转时,第一刀片33转动形成的第一切割区域s1可以为锥形或者台阶形。在割草机沿割草机的长度方向x向前行走时,较长的草可以先被位于上方的第一刀片33切短,再被位于下方的第一刀片33切割,从而使较长的草可以被多次切割,将草切碎。
63.在一种可能的实施方式中,如图2和图3所示,每组第一刀片33中的第一刀片33可以具有多个,例如3个,3个第一刀片33可以沿第一刀盘32的周向间隔均匀地安装于第一刀盘32。第一刀片33为片状,第一刀片33无需形成在旋转时提供上升气流的翻边部,通过上升气流使草向上运动,从而被多次切割。片状的第一刀片33迎风面积较小,在第一刀盘32旋转时,受到的风阻较小,从而可以选用功率较小的第一电机31,进而使割草机的能耗较低。可以理解,可以将半径不同的多个(例如3个)第一刀片33可以通过安装机构安装到第一刀盘32的同一位置。这样,可以简化多个第一刀片33的安装结构和安装步骤。
64.另外,还可以将位于第一刀盘32的同一(周向)位置的多个高度不同的第一刀片33称为一组第一刀片。这样,第一切割单元3可以具有一组或多组第一刀片33,该一组第一刀片(或称一个第一刀片组)具有不同高度的多个第一刀片33。在具有多组第一刀片33的情况下,优选在第一刀盘32的周向上等间隔地分布多组第一刀片33。
65.可以理解,上述两种刀片分组方式不影响本发明的刀片的安装、工作过程和效果。
66.在一种可能的实施方式中,割草机可以包括机架,割草机的机架可以作为割草机的结构主体。
67.优选地,第一切割单元3被配置为能够沿割草机的高度方向z调节安装高度地安装于割草机的壳体和/或机架;第二切割单元4被配置为能够沿割草机的高度方向z调节安装
高度地安装于割草机的壳体和/或机架。这样使割草机可以适用于不同的草况,特别是草的长度不同的草坪。具体地,例如调整第一切割单元3的高度,可以通过调整第一电机31的安装于壳体1的安装高度实现,或者通过调整第一刀片33安装于第一刀盘32的安装高度实现。高度调节的功能可以通过连杆机构实现或者丝杆机构实现。
68.在一种可能的实施方式中,割草机还包括用于驱动第一切割单元3的第一驱动单元,以及用于驱动第二切割单元4的第二驱动单元;或者,割草机还包括驱动装置,驱动装置包括离合器,用以择一或同时驱动第一切割单元3和所述第二切割单元4。离合器可以控制第一切割单元3和第二切割单元4同时被驱动或择一被驱动。根据实际情况,第一切割单元3和第二切割单元4能够同时工作,或者第一切割单元3和第二切割单元4中的仅一者工作。例如在草的长度较短时,就可以仅使第二切割单元4工作,从而降低能耗。
69.本技术还提出一种割草机的控制方法,其包括以下步骤:
70.s100、获取待切割区域的草高,待切割区域的草高包括待切割区域的平均草高或最大草高。
71.其中,获取待切割区域的草高的方式可以是割草机通过传感器(如电容传感器、超声传感器)自动获取或者用户通过其他方式获取。
72.s200、判断待切割区域的草高是否大于或等于预设草高,若是,则控制第一切割单元3和第二切割单元4同时工作;若否,则控制第一切割单元3或第二切割单元4工作。
73.其中,预设草高可以是用户期望的草坪草高,而判断待切割区域的草高是否大于或等于预设草高可以由割草机自动进行判断也可以由用户判断,然后由割草机自动设定或用户手动设定第一切割单元3和第二切割单元4的工作模式。
74.通过上述割草机的控制方法,可以根据实际草高情况选择工作模式,第一切割单元3和第二切割单元4能够同时工作,或者第一切割单元3和第二切割单元4中的仅一者工作。例如在草高小于预设草高时,就可以仅使第二切割单元4工作,从而降低能耗。
75.如图4所示,本技术还提出一种割草机,其包括至少一个第一切割单元3和至少一个第二切割单元4,第一切割单元3被配置为在第一高度上形成第一切割区域s1,第一切割单元3能够对进入第一切割区域s1的草进行切割。第二切割单元4被配置为在第二高度上形成第二切割区域s2,第二切割单元4能够对进入第二切割区域s2的草进行切割。第二切割单元4与第一切割单元3沿割草机的宽度方向y设置,第一高度与第二高度不同。
76.通过在割草机的宽度方向y上设置高度不同的第一切割单元3和第二切割单元4,使割草机在预定区域内按照规划的路径进行单次行走,便可使预定区域内较长的草在不同高度上被切割,进而将草切短、切碎,且行走路径中无重复路径,可以在保证切割效果的同时大大节省切割时间。
77.在一种可能的实施方式中,如图5所示,为减小第一切割单元3和第二切割单元4之间的干涉,同时使第一切割单元3和第二切割单元4切断的草更容易落到地面,第二切割单元4与第一切割单元3沿割草机的宽度方向y设置的同时也可以沿割草机的长度方向x错开,即使得第二切割单元4与第一切割单元3沿割草机的高度方向z在地面上的投影间隔开。
78.可选的,沿割草机的长度方向(x),第一切割区域(s1)的轴线在垂直于割草机的长度方向(x)的平面上具有第一投影,第二切割区域(s2)的轴线在垂直于割草机的长度方向(x)的平面上具有第二投影;其中,第一投影距第二投影的垂直距离小于或等于第一切割区
域(s1)和第二切割区域(s2)的半径之和。如此,在割草机沿割草机的长度方向x行走时,割草机可以切割到第一切割区域s1和第二切割区域s2之间的部分的草坪,防止漏切,提升草坪最终的切割平整度。
79.第一切割单元3被配置为能够沿割草机的高度方向z调节安装高度地安装于割草机的壳体和/或机架。第二切割单元4被配置为能够沿割草机的高度方向z调节安装高度地安装于割草机的壳体和/或机架。从而割草机可以改变第一切割区域s1的高度和第二切割区域s2的高度,灵活应对不同草高的情况。
80.在一种可能的实施方式中,第一切割单元3和第二切割单元4均可以设置有多个,多个第一切割单元可以沿割草机的长度方向x布置,多个第二切割单元可以沿割草机的长度方向x布置。在割草机沿割草机的长度方向x行走时,可以由多个第一切割单元和多个第二切割单元对草进行多次切割,减少漏割的现象。
81.图6示出了图4所示实施方式的割草机的工作路径示意图。如图6所示,虚线矩形框内的区域表示待切割区域a,割草机沿规划路径l单次行走,第一切割区域s1和第二切割区域s2位于规划路径l的两侧。
82.在割草机沿规划路径l由待切割区域a的一侧(图6的下侧)向待切割区域a的另一侧(图6的上侧)行走时,可以使割草机的头部朝前行驶,待切割区域a的第一部分a1先被第一切割单元3切割。在割草机沿规划路径l由待切割区域a的另一侧(图6的上侧)向待切割区域a的一侧(图6的下侧)行走时,可以使割草机的尾部朝前行驶(倒退),此时待切割区域a的第一部分a1再被第二切割单元4切割,待切割区域a的第二部分a2则先被第一切割单元3切割。如此往复,便可使待切割区域a中的各部分区域分别被第一切割单元3和第二切割单元4切割,即在割草机沿规划路径l单次行走的过程中,同一区域可以被第一切割单元3和第四切割单元4各切割一次,使待切割区域a内较长的草被多次切割,将草切碎、切短。
83.可以理解,割草机在行走时可以头部朝前行驶与尾部向前行驶相结合,如在图6的尖角转弯时改变行驶方向,由头部朝前行驶变为尾部朝前行驶;还可以始终头部或尾部朝前行驶,并且在掉头转弯后调节第一切割单元3和第二切割单元4的高度,改变第一切割区域s1和第二切割区域s2的高度,从而使待切割区域a的各部分区域被处于不同高度的第一切割单元3或第二切割单元4切割。
84.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
85.虽使用上述实施方式对本技术进行了详细说明,但对于本领域技术人员来说,本技术显然并不限定于在本说明书中说明的实施方式。本技术能够在不脱离由权利要求书所确定的本技术的主旨以及范围的前提下加以修改并作为变更实施方式加以实施。因此,本说明书中的记载以示例说明为目的,对于本技术并不具有任何限制性的含义。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。