1.本发明涉及一种钻孔清洁器,其具有气流产生单元和清洁元件,所述气流产生单元与管元件连接,所述管元件具有吹出开口,由气流产生单元产生的气流通过该吹出开口吹出,所述清洁元件布置在管元件上。
背景技术:
2.由现有技术已知这种钻孔清洁器。该钻孔清洁器具有用于产生气流的风箱,其中,气流通过管元件被吹出。在管元件上布置有刷子。
3.这种钻孔清洁器尤其需要用于准备钻孔,以便随后在墙壁、外墙等中布置锚栓,例如机械锚栓或化学锚栓。相应地清洁的钻孔是必要的,以便锚栓能够稳定地固定在钻孔中。
技术实现要素:
4.本发明涉及一种钻孔清洁器,其具有气流产生单元和清洁元件,所述气流产生单元与管元件连接,所述管元件具有吹出开口,由气流产生单元产生的气流通过该吹出开口吹出,所述清洁元件布置在管元件上。设置电子辅助单元,用于感测钻孔清洁器的至少一个特征参量。
5.因此,本发明可以提供一种钻孔清洁器,其中可以通过电子辅助单元实现安全且可靠地监控、记录和/或传输工作过程。
6.优选地,电子辅助单元具有至少一个传感器,其中,所述至少一个传感器是压力传感器、流量传感器、运动传感器,尤其是加速度传感器或旋转速率传感器、声音传感器,尤其是麦克风或超声波传感器、电容传感器、电阻传感器、电感传感器和/或光学传感器。
7.因此可以容易且不复杂地提供用于感测至少一个特征参量的合适的传感器。
8.优选地,根据至少一个感测到的特征参量通过分析评估单元能够求取钻孔深度、钻孔定位、钻孔清洁器的定向、钻孔清洁器的运动和/或对钻孔清洁的评价。
9.因此可以以简单的方式将加工过程的信息传递给使用者。
10.根据一个实施方式设置安全阀,该安全阀构造为用于保持钻孔清洁器的至少部分区域无尘,其中,电子辅助单元至少部分地布置在无尘区域中。
11.因此能够实现钻孔清洁器的安全且可靠的运行。
12.优选地,设置能量产生单元用于电子辅助单元的能量供给。
13.因此可以简单且不复杂地提供电子辅助单元的能量供给。
14.优选地,电子辅助单元具有用于将信息传输给外部设备的通信接口。
15.因此可以将求出的信息安全且可靠地传输给外部设备。
16.根据一个实施方式,电子辅助单元具有通信接口,用于给使用者传输信息,尤其通过显示单元。
17.因此,使用者可以根据相应传输的信息适配相应的加工过程。
18.优选地,电子辅助单元具有存储单元。
19.因此可以以简单的方式存储感测和/或求出的信息。
20.优选地,气流产生单元具有风箱、马达式风扇和/或气压筒。
21.因此可以提供安全且鲁棒的气流产生单元。
22.优选地,管元件在吹出开口的区域中具有可伸缩区段。
23.因此,管元件的长度可以容易且不复杂地适配于要吹净的凹槽。
24.根据一个实施方式,钻孔清洁器构造为手持式器具或构造为具有用于与手持式工具机连接的接口的附件。
25.因此可以以简单的方式提供多用途的钻孔清洁器。
26.此外,本发明提供一种用于提供关于借助钻孔清洁器的工作过程的信息的方法,所述钻孔清洁器具有用于感测钻孔清洁器的至少一个特征参量的电子辅助单元。所述方法的特点在于以下步骤:
27.a)通过电子辅助单元感测钻孔清洁器的至少一个特征参量,
28.b)基于至少一个感测到的特征参量通过配属的分析评估单元求取信息、尤其是钻孔深度、钻孔定位、钻孔清洁器的定向、钻孔清洁器的运动和/或对钻孔清洁的评价,
29.c)通过通信接口将求出的信息传输给外部设备和/或使用者,用于操作钻孔清洁器。
30.因此,本发明提供一种用于提供关于借助钻孔清洁器的工作过程的信息的方法,在所述钻孔清洁器中能够通过电子辅助单元实现钻孔清洁器的简单且用户友好的操作。
31.优选地,在钻孔外进行功能测试,其中,钻孔清洁器的管元件在出口的区域中具有可伸缩区段并且将可伸缩区段伸出。
32.因此能够以简单且不复杂的方式执行功能测试。
33.优选地,电子辅助单元构造为用于根据探测到的压力曲线在管元件至少部分地布置在钻孔内与布置在钻孔外之间进行区分。
34.因此可以安全且可靠地区分功能测试和加工过程。
附图说明
35.在下面的描述中根据在附图中所示的实施例更详细地阐述本发明。附图示出了:
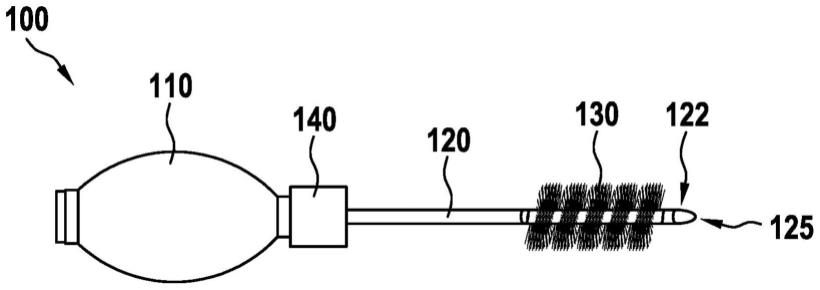
36.图1:具有电子辅助单元的钻孔清洁器的侧视图,
37.图2:图1的电子辅助单元的示意性结构,
38.图3:图1的钻孔清洁器在功能测试时的侧视图,
39.图4:图1和图3的钻孔清洁器在工作步骤期间的侧视图,
40.图5:图1、3和4的钻孔清洁器在另一工作步骤期间的侧视图,
41.图6:在功能测试期间配属于图1和图2的电子辅助单元的测量曲线图,
42.图7:在工作过程期间配属于图1和图2的电子辅助单元的测量曲线图,和
43.图8:具有图1的钻孔清洁器的手持式工具机的侧视图。
44.在附图中,具有相同或类似功能的元件具有相同的附图标记并且仅被更详细地描述一次。
具体实施方式
45.图1示出具有气流产生单元110和管元件120的钻孔清洁器100。优选地,气流产生单元110具有风箱、马达式风扇和/或气压筒。气流产生单元110图示地构造为风箱。气流产生单元110优选地与管元件120连接,使得尤其由气流产生单元110产生的气流(图3中的310)可以被吹入到管元件120中并且通过吹出开口125吹出。优选地,管元件120在吹出开口125的区域中具有可伸缩的区段122。可伸缩的区段122构造为用于能够实现管元件120的长度的改变。
46.优选地,管元件120在其背离气流产生单元110的端部处具有吹出开口125。根据一个实施方式,吹出开口125具有多个开口,这些开口布置在管元件120的轴向端部上和/或在管元件120的侧向或径向方向上。需要指出的是,吹出开口125也可以构造为用于吸入空气的吸入开口。
47.管元件120可以刚性或柔性地构造。在此,管元件120具有硬塑料、合成材料和/或金属。替代地,管元件120也可以配有不同长度的可伸缩区段122,使得使用者可以根据应用情况在管元件120上布置具有合适长度的可伸缩区段122。此外,可以设置不同的管元件120,使得使用者可以根据钻孔选择合适的具有清洁元件130和可伸缩区段122的管元件120,并且将其连接在气流产生单元110上。
48.此外,钻孔清洁器100优选地具有清洁元件130。优选地,清洁元件130构造为用于清洁钻孔(图4中的412),尤其用于使钻孔(图4中的412)中的钻孔颗粒和/或钻孔灰尘松散。优选地,清洁元件130布置在管元件120上。
49.图示地,清洁元件130构造为刷子。优选地,清洁元件130或者说刷子的外径适配于待加工的钻孔(图4中的412)的直径。替代地,具有不同外径的清洁元件130可以配属于管元件120,其中,使用者可以将合适的清洁元件130优选可更换地固定在管元件120上。此外,清洁元件130也可以具有多个外径,它们共同形成例如锥形的刷子形状。此外,可以设置具有不同材料和/或不同硬度,例如刷子硬度的清洁元件130。
50.为了感测钻孔清洁器100的至少一个特征参量,优选地设置用于监测、记录和/或传输钻孔清洁器100的工作过程的电子辅助单元140。在此,钻孔清洁器100的工作过程可以被记录、监控并且检查正确的执行。记录可以在钻孔清洁器100内部和/或在外部设备上进行。
51.电子辅助单元140在图1中例如布置在气流产生单元110的面向吹出开口125的一侧上。钻孔深度、钻孔定位、钻孔清洁器100的定向、钻孔清洁器100的运动和/或对钻孔清洁的评价优选地能够根据至少一个感测到的特征参量求取。优选地,电子辅助单元140构造为用于根据探测到的压力曲线(图6中的610、620;图7中的710、720)在管元件120的至少区段地布置在钻孔(图4中的412)内(参见图4)和布置在钻孔外部(参见图3)之间区分。
52.图2示出图1的电子辅助单元140,用于直观说明示例性结构,所述电子辅助单元具有其第一轴向端部201和其相对的第二轴向端部202。电子辅助单元140优选地具有壳体205,该壳体具有通流槽口290,由气流产生单元110产生的气流可以流过该通流槽口。优选地,电子辅助单元140具有至少一个传感器212、230。此外,电子辅助单元140优选地具有电子单元210。根据一个实施方式,电子单元210布置在通流槽口290外。优选地,电子辅助单元140或通常图1的钻孔清洁器100具有安全阀220。优选地,安全阀220布置在通流槽口290中。
53.优选地,安全阀220构造为用于将图1的钻孔清洁器100的至少一个部分区域保持无尘。优选地,电子辅助单元140至少部分地布置在钻孔清洁器100的无尘区域中。优选地,安全阀220通过防止由空气产生单元110产生的气流被吹回到空气产生单元110将图1的钻孔清洁器100保持至少部分地无尘。因此,通过安全阀220或无尘区域可以确保电子辅助单元140安全且可靠地运行,其中,尤其可以保护电子单元210或配属于电子辅助单元140的至少一个传感器212、230。
54.至少一个传感器212、230优选地是压力传感器、流量传感器、运动传感器,尤其是加速度传感器或旋转速率传感器、声音传感器,尤其是麦克风或超声波传感器、电容传感器、电阻传感器、电感传感器和/或光学传感器。压力传感器优选地感测气压并且流量传感器优选地感测存在的气流。此外,运动传感器优选地感测图1的钻孔清洁器100的运动。声音传感器感测声音或噪声,其中,例如不同的工作过程分别配有典型或特有的噪声。通常,至少一个传感器212、230例如感测气流、运动和/或位置,其中,相应地求出的数据在下面称为感测到的特征参量。
55.优选地,设置分析评估单元270,其构造为用于由至少一个感测到的特征参量求取配属于钻孔清洁过程的信息。优选地,分析评估单元270配属于电子辅助单元140、尤其是电子单元210。优选地,分析评估单元270集成到图1的钻孔清洁器100和/或电子辅助单元140中。此外,分析评估单元270也可以构造为外部设备。
56.优选地,分析评估单元270根据至少一个感测到的特征参量,如在图1中所述的那样,求取钻孔(图4中的412)的钻孔深度、钻孔定位,即图1中的钻孔清洁器100在钻孔(图4中的412)中的位置、钻孔清洁器100的定向、钻孔清洁器100的运动和/或对钻孔清洁的评价。优选地,钻孔深度例如可以根据压力传感器、光学传感器和/或位置传感器的两个求出的值来求取。在此,由至少一个传感器212、230求出的特征参量或者说在钻孔内的第一测量(参见图4)和在钻孔外的第二测量(参见图3)是不同的。因此,例如光学传感器可以在布置在钻孔中时由于钻孔中黑暗而传输黑色图像和在钻孔外的明亮图像,并且因此关联钻孔清洁器100的位置。例如也可以通过图1的管元件120的伸出长度和/或通过特定的噪声或压力特性求取钻孔深度。在借助图1的清洁元件130的清洁过程期间,电子单元210例如可以识别运动的定向和类型或运动的某些特有分量,以便将正确的清洁过程例如与自由实施的抖动区分。
57.替代地或可选地,图1的钻孔清洁器100,优选地电子辅助单元140具有能量产生单元240。能量产生单元240构造为用于电子辅助单元140的能量供给。优选地,能量产生单元240布置在通流槽口290中。图示地,通流槽口290面向第二轴向端部202布置。在此,通流槽口290布置在安全阀220之后或布置在无尘区域中。在此,能量产生单元240通过流过的空气产生能量。在此,能量产生单元240可以构造为涡轮机和/或电磁发电机。
58.优选地,电子辅助单元140、尤其是电子单元210具有通信接口214。通信接口214构造为用于将求出的信息传输给外部设备,例如智能手机和/或传输给使用者。优选地,将求出的信息传输给使用者,尤其通过显示单元250。在此,显示单元250例如可以构造为声学显示器,例如扬声器,和/或构造为显示屏。此外,显示单元250也可以仅构造为双色led。
59.替代地或可选地,电子辅助单元140、尤其是电子单元210具有存储单元260。存储单元260优选地构造为用于存储至少一个感测到的特征参量和/或求出的信息。优选地,存
储的数据可以用于记录钻孔清洁过程。
60.根据在图2中所示的实施方式,电子辅助单元140具有三个传感器212、230,尤其一个运动传感器212和两个压力传感器230。图示地,一个压力传感器230面向第一轴向端部201布置。一个压力传感器230面向第二轴向端部202布置。优选地,压力传感器230布置在通流槽口290中。尤其,一个压力传感器230布置在安全阀220之前并且一个压力传感器230布置在安全阀220之后。优选地,面向第二轴向端部202布置的压力传感器230布置在能量产生单元240和安全阀220之间。
61.在通过电子辅助单元140,优选地通过电子单元210检查钻孔清洁过程的正确执行时,优选地给使用者和/或外部设备进行反馈。在此,例如可以在钻孔清洁过程期间检查钻孔深度和/或其它钻孔特性。
62.通过由电子辅助单元140监控执行和检查钻孔清洁过程的正确实施,消除关于要求和实际执行的不确定性。因此能够实现针对大量任务的可比较的要求。此外,不熟练的使用者可以获得反馈。
63.通过由电子辅助单元140检查钻孔或孔特性,可以减少或消除执行在墙壁中安装锚栓,例如膨胀锚栓或化学锚栓的其它不确定性。因此,通过电子辅助单元140可以检查钻孔过程的正确执行和/或检查钻孔中的条件,例如直径、湿度、粗糙度等。
64.在用于提供关于借助图1的钻孔清洁器100的工作过程的信息的方法中,钻孔清洁器100的至少一个特征参量首先由电子辅助单元140感测。随后,基于至少一个感测到的特征参量通过配属的分析评估单元270进行信息求取。然后将求出的信息通过通信接口214传输给外部设备和/或使用者,尤其用于操作钻孔清洁器100。
65.图3示出图1的钻孔清洁器100,其中,管元件120的可伸缩区段122图示地伸出。在此,清洁元件130例如居中地布置在管元件120上。图3在此示出钻孔清洁器100的功能测试,其中通过操纵气流产生单元110将可伸缩区段122伸出并且气流310从吹出开口125流出。在此,电子辅助单元140例如以视觉和/或听觉的方式,例如通过以图2的显示单元250的第一颜色点亮led和/或通过可听到的声音用信号通知探测到的功能测试。
66.图4示出图1和图3的钻孔清洁器100,该钻孔清洁器以其可伸缩区段122嵌入到示例性的壁410的钻孔412中。在操纵气流产生单元110时,气流420从吹出开口125吹向钻孔412的底面416。随后,气流420在底面416上偏转,例如通过从底面416反弹并从钻孔412中吹出。在此,具有来自钻孔412的灰尘和/或钻孔颗粒的气流422从钻孔412中流出。
67.优选地,在吹出过程期间,清洁元件130布置在钻孔外,在示例性的壁410的端侧414的区域中。优选地,电子辅助单元140探测吹出钻孔412并且这通过图2的显示单元250显示。吹出过程的显示可以类似于图3的功能测试实现,其中显示单元250例如以第二颜色点亮或发出另一声音信号。
68.图5示出在清洁过程期间的钻孔清洁器100,其中清洁元件130图示地布置在钻孔412中。在清洁过程中,清洁元件130可以沿着钻孔412在轴向方向502上运动和/或在钻孔412中在圆周方向501上旋转。在清洁过程期间或者说在清洁元件130在钻孔412中沿轴向方向502运动时,可伸缩区段122能够通过在底面416上加载吹出开口125而一起移动。类似于图3的功能测试和图4的吹出过程,电子辅助单元140也可以在清洁过程中通过图2的显示单元250输出信号。
69.优选地,钻孔清洁过程具有至少两个吹出过程和一个清洁过程,其中,清洁过程优选在两个吹出过程之间发生。一个典型的钻孔清洁过程优选地紧接着两个清洁过程具有两个吹出过程,随后再一次具有两个吹出过程。
70.由气流产生单元110产生的空气通过管元件120被吹到钻孔412中,并且以较高的阻力从钻孔412被吹出。优选地,清洁元件130防止将灰尘和/或钻孔颗粒直接吹到钻孔清洁器100的使用者身上。在此,钻孔清洁器100可以在清洁元件130的区域中可选地具有防尘唇。
71.图6示出示例性的具有横坐标601和纵坐标602的测量曲线图600。在此,时间t绘制在横坐标601上并且压力p绘制在纵坐标602上。测量曲线图600具有两个压力曲线610、620。在此,压力曲线610、620分别配属于图2的压力传感器230。在此,压力曲线610配属于布置在安全阀220之前或在无尘区域外的压力传感器230,而压力曲线620配属于布置在安全阀220之后或在无尘区域中的压力传感器230。在此,压力曲线610、620被分成三个区域a、b、c。在此,压力曲线布610在区域a中直观示出在安全阀220之前或在无尘区域外的压力提高,区域b直观示出吹出气流,而区域c直观示出压力走势的升高。
72.测量曲线图600或压力曲线610、620在此直观示出根据图3的功能测试。在此,在区域a中,在安全阀220之前的压力提高至打开压力。在区域b中,空气或气流无阻力地快速吹出,其中,由于动态压力增加而存在静态压力。在区域c中,两个传感器230建立的压力升高到周围环境压力。
73.图7示出具有横坐标701和纵坐标702的测量曲线图700,其中,在横坐标上绘制出时间t并且在纵坐标702上绘制出压力p。类似于图6,图7具有配属于布置在安全阀220之前或在无尘区域外的压力传感器230的压力曲线710,以及配属于在安全阀220之后或在无尘区域中的压力传感器230的压力曲线720。
74.测量曲线图700在此直观示出吹出钻孔412或者说钻孔清洁过程。类似于图6,在区域a中,在安全阀220之前的压力提高至打开压力。在区域b中,由于钻孔412中的灰尘压力而形成增加的压力,该压力在区域c中的压力又回落到周围环境压力之前通过钻孔412和清洁元件130更缓慢地下降。
75.需要指出的是,图6中的测量曲线图600和图7中的测量曲线图700仅具有示例性的特点,并且在实践中根据压力波、设备的结构、钻孔和其它框架条件能够发生显著变化。然而,也可以在不同的框架条件下确定根据图3的功能测试与根据图4和图5的钻孔清洁过程之间的差异。
76.图8示出示例性的具有壳体805的手持式工具机800,在该壳体中布置有至少一个用于驱动工具接收部840的驱动马达880。图示地和示例性地,手持式工具机800构造为带有蓄电池850的蓄电池起子机,但也可以构造为电缆连接的起子机和/或钻锤。驱动马达880在此可以通过布置在手持式工具机800的把手815上的操作元件895来激活。
77.根据一个实施方式,图1的钻孔清洁器100构造为用于手持式工具机800的附件。为此,钻孔清洁器100具有用于与手持式工具机800的工具接收部840连接的接口820。在此,这种接口820例如可以构造为六角接口、sds接口或圆轴接口。
78.在图8中示出钻孔清洁器100集成到手持式工具机系统中,其中,钻孔清洁器100除了记录钻孔和放置过程外还能够感测、评定和/或记录清洁过程。在此,记录也可以在手持
式工具机800的存储器中或在外部的服务器上进行。在此,钻孔清洁器100可以通过无线电连接与手持式工具机800或服务器连接,用于数据交换。在此,钻孔清洁器100的信号也可以输出给手持式工具机800。
79.通过钻孔清洁器100可以进行全面记录放置过程,例如将锚栓放置在墙壁中,以及整体评估利用锚栓固定的安全性。此外,因此可以简单地准备采样验收和基于事实优先处理根据特殊事件例如地震等的程序。同样可以在任务和履行程度之间进行比较和/或对使用寿命进行预测或进行状态预测。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
